Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Описание работы САУ температуры теплоносителя в сушильной камере.Содержание книги
Поиск на нашем сайте СОДЕРЖАНИЕ КУРСОВОЙ РАБОТЫ ДИСЦИПЛИНЫ.
Анализ и расчет систем управления с обратной связью теснейшим образом связаны с динамикой. Каждый элемент в системе должен рассматриваться как динамический, причем его динамические характеристики задаются либо численно, либо графически, либо в форме уравнения. Довольно часто динамику элементов систем автоматического управления удается описать линейными дифференциальными уравнениями с постоянными коэффициентами. В этом случае работа системы может анализироваться посредством хорошо развитого аппарата линейной теории следящих систем.
Фактически можно утверждать, что не существует полностью линейных физических систем или, наоборот, что все физические системы нелинейные. Хорошо известно, что анализ и расчеты, выполненные на основе линейной теории, позволяют создавать совершенные устройства, фактическая работа которых в большой степени согласуется с данными, полученными из линейных расчетов. С другой стороны, для инженера-автоматчика все более очевидно, что ограничение аппарата анализа методами линейной теории не дает удовлетворительного результата в случае высококачественных систем, предназначенных для работы в широком диапазоне рабочих условий. Линейная теория часто полезна на стадии начального изучения; распространенной является практика, при которой предварительный анализ и расчет проводятся в линейном плане, а в процессе уточненного расчета рассматривается влияние существенных нелинейностей.
Задание на анализ и расчет нелинейных систем автоматического управления (САУ): 1. Составить структурно - функциональную схему нелинейной САУ температуры теплоносителя в сушильной камере.
2. Разработать математические модели элементов нелинейной САУ температуры теплоносителя в сушильной камере.
3. Составить структурно - математическую схему нелинейной САУ температуры теплоносителя в сушильной камере.
4. Оценить качественные показатели регулирования нелинейной САУ температуры в сушильной камере.
5. Исследовать устойчивость нелинейной САУ температуры в сушильной камере.
Составление структурно-функциональной схемы САУ температуры теплоносителя.
На структурно-функциональной схеме изображают основные функциональные элементы САУ с указанием их названия и показывают связи между ними. Элементы САУ на схеме изображают в виде прямоугольников, соединенных между собой линиями со стрелками, показывающими направление воздействия. Надписи внутри прямоугольников обозначают функциональное назначение элементов. Элемент сравнения обозначают в виде круга, разделенного на 4 сектора.
Структурно – функциональная схема САУ температуры теплоносителя в сушильной камере, соответствующая принципиальной схеме (см. рис. 1), изображена на рис. 3. Описание сигналов, изображенных на структурно-функциональной схеме, дано в разделе 2.
2. Составление математических моделей элементов САУ температуры теплоносителя в сушильной камере.
Для заданной принципиальной схемы (см. рис. 1) составим дифференциальные уравнения звеньев системы.
Составление структурно-математической схемы САУ температуры теплоносителя.
СОДЕРЖАНИЕ КУРСОВОЙ РАБОТЫ ДИСЦИПЛИНЫ.
Анализ и расчет систем управления с обратной связью теснейшим образом связаны с динамикой. Каждый элемент в системе должен рассматриваться как динамический, причем его динамические характеристики задаются либо численно, либо графически, либо в форме уравнения. Довольно часто динамику элементов систем автоматического управления удается описать линейными дифференциальными уравнениями с постоянными коэффициентами. В этом случае работа системы может анализироваться посредством хорошо развитого аппарата линейной теории следящих систем.
Фактически можно утверждать, что не существует полностью линейных физических систем или, наоборот, что все физические системы нелинейные. Хорошо известно, что анализ и расчеты, выполненные на основе линейной теории, позволяют создавать совершенные устройства, фактическая работа которых в большой степени согласуется с данными, полученными из линейных расчетов. С другой стороны, для инженера-автоматчика все более очевидно, что ограничение аппарата анализа методами линейной теории не дает удовлетворительного результата в случае высококачественных систем, предназначенных для работы в широком диапазоне рабочих условий. Линейная теория часто полезна на стадии начального изучения; распространенной является практика, при которой предварительный анализ и расчет проводятся в линейном плане, а в процессе уточненного расчета рассматривается влияние существенных нелинейностей.
Задание на анализ и расчет нелинейных систем автоматического управления (САУ): 1. Составить структурно - функциональную схему нелинейной САУ температуры теплоносителя в сушильной камере.
2. Разработать математические модели элементов нелинейной САУ температуры теплоносителя в сушильной камере.
3. Составить структурно - математическую схему нелинейной САУ температуры теплоносителя в сушильной камере.
4. Оценить качественные показатели регулирования нелинейной САУ температуры в сушильной камере.
5. Исследовать устойчивость нелинейной САУ температуры в сушильной камере.
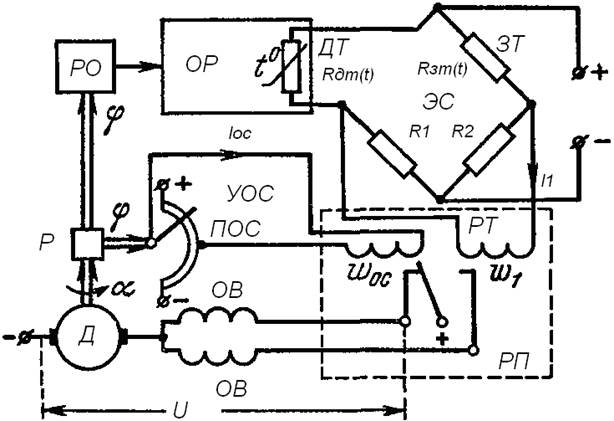
Описание работы САУ температуры теплоносителя в сушильной камере. В состав нелинейной САУ наряду с объектом регулирования (ОР) - сушильной камеры входят следующие технические средства автоматизации (см. рис. 1): РО — регулирующий орган (поворачивающая заслонка), который изменяет соотношение между количеством холодного воздуха и горячего газа; Р— редуктор; ИМ – исполнительный механизм, роль которого выполняет двигатель постоянного тока Д с последовательным возбуждением и обмотки возбуждения 0В, Э C — элемент сравнения, роль которого выполняет мостовая схема измерения, состоящая из резистивного сопротивления R дт(t) датчика температуры (ДТ), резистивного сопротивления R зт(t) задатчика температуры (ЗТ) и двух постоянных резистивных сопротивлений R 1 и R 2; РТ – регулятор температуры, роль которого выполняет обмотка w 1; УОС – устройство обратной связи, роль которой выполняют потенциометр обратной связи – ПОС и обмотка обратной связи w ОС поляризованного реле РП; РП – регулятор углового положения регулирующего органа – заслонки, роль которого выполняет поляризованное реле.
Данная нелинейная САУ работает следующим образом. Если фактическое значение температуры воздуха равно заданному значению, то сопротивление термометра сопротивления R дт(t) равно заданному сопротивлению R зт(t) и мостовая схема измерения находится в состоянии равновесия. При этом ток в управляющей обмотке реле отсутствует, якорь реле РП находится в нейтральном положении и электродвигатель Д не движется.
Если температура воздуха под действием возмущений изменится, и, следовательно, изменится по сравнению с заданным сопротивлением в противоположном плече сопротивление термометра сопротивления, то в управляющей обмотке реле возникнет ток. В зависимости от направления тока замкнется либо левый, либо правый контакт реле, в соответствующей обмотке возбуждения двигателя ОВ также возникнет ток и электродвигатель, вращаясь в ту или иную сторону, переместит регулирующий орган в ту или иную сторону. При этом изменится температура в сушильной камере. Когда сопротивления в противоположных плечах моста будут равны, якорь реле займет нейтральное положение и электродвигатель остановится. Для обеспечения устойчивости в САУ применена обратная связь, охватывающая регулятор и исполнительный механизм. Конструктивно обратная связь выполнена в виде потенциометра, движок которого жестко связан с заслонкой, и обмотки обратной связи w ОС.
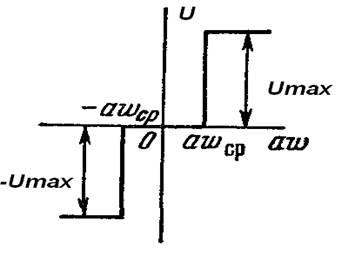
Для усиления мощности выходного сигнала и формирования управляющего воздействия в системе используется регулятор – поляризованное реле, управляющее направлением вращения электродвигателя Д. Если ток в управляющей обмотке РП w 1 отсутствует, то якорь находится в среднем, нейтральном, положении, так как он с одинаковой силой притягивается как к левому, так и к правому положительному наконечнику. В этом положении контакты реле разомкнуты. При появлении тока в управляющей обмотке якорь притягивается влево или вправо, в зависимости от направления тока. Поляризованное реле является трехпозиционным (замкнут левый контакт – оба контакта разомкнуты – замкнут правый контакт). На рис. 2 представлена характеристика поляризованного реле, где Umax – максимальное значение напряжения на выходе релейного элемента; aw (aw ср)- результирующее (среднее) значение ампер-витков обмоток w 1 и w ОС поляризованного реле РП. .
Рис. 2. Характеристика поляризованного реле.
|
|||
|
|
Последнее изменение этой страницы: 2020-10-24; просмотров: 178; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.01 с.) |