
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
По заданным критериям качества»Стр 1 из 4Следующая ⇒
КУРСОВАЯ РАБОТА
по ТЕОРИИ УПРАВЛЕНИЯ
«СИНТЕЗ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МАССЫ КВАДРАТНОГО МЕТРА БУМАЖНОГО ПОЛОТНА ПО ЗАДАННЫМ КРИТЕРИЯМ КАЧЕСТВА»
Выполнил: студент V курса . Ситников С. А. . шифр 965-450 . Проверил: преподаватель . Селянинова Л. Н. .
С.-ПЕТЕРБУРГ 2000г.
Задача
Цель создания автоматической системы – достичь того, чтобы значение массы 1 кв. м. бумажного полотна было равно заданному. При этом требуется, чтобы точность регулирования, т.е. возможное отклонение, находилось в определенных пределах. Поэтому, для синтеза системы выбран принцип управления по отклонению регулируемой величины от задания.
Принцип работы
Объект регулирования – напорный ящик БДМ. Регулируемая величина – масса 1 кв.м. полотна. Регулирующая величина – расход массы. Возмущающее воздействие – изменение концентрации массы. Автоматический регулятор – средство решения задачи регулирования. Автоматический регулятор состоит из электронного датчика измеряющего массу 1 кв.м. полотна, регулирующего блока (электрорегулятор и электродвигатель), приблизительно соответствующего ПИ-закону регулирования, клапана, изменяющего расход бумажной массы.
1. - бак массы 2. – напорный ящик 3. – сушильные группы 4. – каландр 5. – датчик массы 1кв.м. полотна 6. – преобразователь 7. – регулятор 8. – эл. двигатель - исполнительный механизм 9. – регулирующий орган - клапан
Текущее значение массы 1 кв.м. полотна фиксируется датчиком. Через преобразователь на регулирующий блок подается электрический сигнал. В регулирующем блоке происходит сравнение поступившего сигнала с заданным значением. В результате сравнения полученное отклонение определяет величину управляющего воздействия, которое должно нейтрализовать отклонение. В зависимости от величины и знака управляющего воздействия, управляющий блок формирует воздействие на исполнительный механизм (эл. двигатель). Таблица 2
Из графика АЧХ видно: чем меньше частота входного сигнала, тем больше этот сигнал усиливается. При w = 0 коэффициент усиления равен максимальному значению 112. При больших частотах выходная величина по модулю стремится к нулю. Такие сигналы объект не пропустит.
С ростом частоты увеличивается также фазовый сдвиг выходных колебаний по отношению к входным. Фазо-частотная характеристика положительна, следовательно, выходные колебания по фазе опережают входные. При w = w0 j(w) = p.
Дискретная модель системы.
Импульсную модель элемента можно описать разностным уравнением, вид которого определяется формирующим элементом. Самым простым формирующим элементом является экстраполятор нулевого порядка с передаточной функцией вида:
Выбор периода дискретности Т0.
Допустимая погрешность моделирования определяется из условия выбора периода дискретности Т0 = Т/(10 ¸15), где Т – постоянная времени системы, при этом должно выполнятся условие: t / Т0 > 5 ¸ 10, где t - запаздывание системы. Дискретная модель объекта регулирования: Дискретная модель регулятора совместно с регулирующим блоком. Дискретная модель датчика: Wдат (Z) = Kд = 0.25
КУРСОВАЯ РАБОТА
по ТЕОРИИ УПРАВЛЕНИЯ
«СИНТЕЗ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МАССЫ КВАДРАТНОГО МЕТРА БУМАЖНОГО ПОЛОТНА ПО ЗАДАННЫМ КРИТЕРИЯМ КАЧЕСТВА»
Выполнил: студент V курса . Ситников С. А. . шифр 965-450 . Проверил: преподаватель . Селянинова Л. Н. .
С.-ПЕТЕРБУРГ 2000г.
Задача
Цель создания автоматической системы – достичь того, чтобы значение массы 1 кв. м. бумажного полотна было равно заданному. При этом требуется, чтобы точность регулирования, т.е. возможное отклонение, находилось в определенных пределах. Поэтому, для синтеза системы выбран принцип управления по отклонению регулируемой величины от задания.
Принцип работы
Объект регулирования – напорный ящик БДМ. Регулируемая величина – масса 1 кв.м. полотна. Регулирующая величина – расход массы. Возмущающее воздействие – изменение концентрации массы. Автоматический регулятор – средство решения задачи регулирования. Автоматический регулятор состоит из электронного датчика измеряющего массу 1 кв.м. полотна, регулирующего блока (электрорегулятор и электродвигатель), приблизительно соответствующего ПИ-закону регулирования, клапана, изменяющего расход бумажной массы.
1. - бак массы 2. – напорный ящик 3. – сушильные группы 4. – каландр 5. – датчик массы 1кв.м. полотна 6. – преобразователь 7. – регулятор 8. – эл. двигатель - исполнительный механизм 9. – регулирующий орган - клапан
Текущее значение массы 1 кв.м. полотна фиксируется датчиком. Через преобразователь на регулирующий блок подается электрический сигнал. В регулирующем блоке происходит сравнение поступившего сигнала с заданным значением. В результате сравнения полученное отклонение определяет величину управляющего воздействия, которое должно нейтрализовать отклонение. В зависимости от величины и знака управляющего воздействия, управляющий блок формирует воздействие на исполнительный механизм (эл. двигатель).
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-03-26; просмотров: 94; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.223.124.244 (0.048 с.) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||

 Параметры модели:
- постоянная времени объекта
- коэффициент передачи объекта
- запаздывание по рассматриваемому каналу передачи информации
Параметры модели:
- постоянная времени объекта
- коэффициент передачи объекта
- запаздывание по рассматриваемому каналу передачи информации
 с
с
 Параметр модели: коэффициент передачи
Параметр модели: коэффициент передачи
 К1 - пропорциональная составляющая закона регулирования
К2 - интегральная составляющая закона регулирования
К1 - пропорциональная составляющая закона регулирования
К2 - интегральная составляющая закона регулирования
 Параметры модели: коэффициент передачи
Параметры модели: коэффициент передачи

 2. Изменение концентрированной массы:
2. Изменение концентрированной массы:

 :
:
 с
с

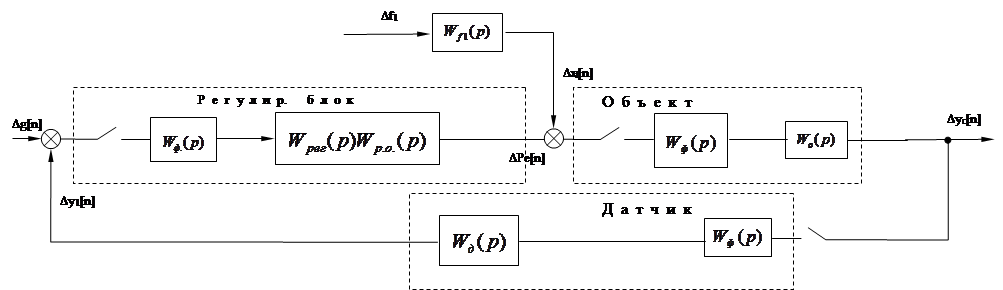
 Функциональная схема системы.
Функциональная схема системы.

 ,
рад.
,
рад.




 , где Т0 – период дискретности. Тогда дискретная передаточная функция непрерывного элемента найдётся как:
, где Т0 – период дискретности. Тогда дискретная передаточная функция непрерывного элемента найдётся как: 

 , где
, где  ; m = t/T0 (число тактов запаздывания – целое число).
; m = t/T0 (число тактов запаздывания – целое число).



