
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Синтез системы подчиненного управленияСодержание книги
Поиск на нашем сайте
Синтез системы подчиненного управления
1.1 Формулировка требований к системе и расчет параметров объекта управления
Поскольку задачей курсового проекта является сопоставление двух систем – то требование, предъявляемые к ЭП относятся как к линейной, так и к релейной системе управления. Одновременно они должны соответствовать большинству реальных объектов. Таким образом, полагаем, что диапазон регулирования системы должен находиться в составляет D = 50... 10000. В зависимости от схемотехники конкретного преобразователя и узлов системы управления. Кроме того, к динамическим показателям, которые должна обеспечивать система, относятся: 1) постоянство ускорения при пуске и торможении; 2) инвариантность ускорения к координатным возмущениям; 3) перерегулирование тока - не более 30 %; 4) перерегулирование скорости - не более 5%; 5) динамическая просадка скорости при набросе нагрузки не более 2%; Для управления двигателем постоянного тока через преобразователи используем систему последовательной коррекции, система подчиненного регулирования. Преимущество систем с последовательной коррекцией является удобство ограничения любого из регулируемого параметров на заданном уровне. Поддержание заданных параметров на требуемом уровне достигается построением замкнутых систем управления, а повышение качественных показателей введением корректирующих звеньев, регуляторов. При составлении структурной схемы тиристорный возбудитель представляем инерционным звеном первого порядка с передаточной функцией:
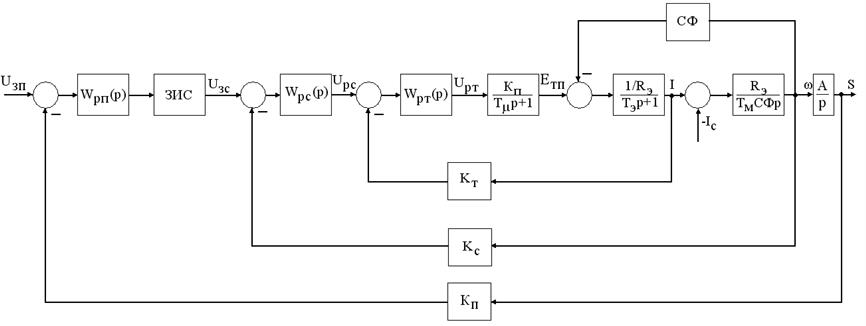
где Ктп –коэффициент усиления тиристорного возбудителя; Тμ – постоянная времени тиристорного преобразователя. На рисунке 1.1 приведена структурная схема объекта управления.
-Ic Uз Uп І ω -Е
Рисунок 1.1 - Структурная схема объекта управления
Рисунок 1.2 – Структурная схема линейной системы управления двигателем
Определяем электромагнитную и электромеханическую постоянные времени Тэ и ТМ:
Определяем коэффициент пропорциональности между скоростью и ЭДС двигателя:
Синтез регулятора тока
Внутренний контур образован регулятором тока, тиристорным преобразователем, якорной цепью и замыкается обратной связью по току и коэффициентом передачи Кот. Оптимизированный контур представляет собой составную часть объекта управления в контуре регулирования скорости, от его быстродействия в значительной степени зависят динамические качества системы управления ЭП. В большинстве случаев влиянием ЭДС двигателя на работу внутреннего контура можно пренебречь, ввиду относительно медленного изменения ЭДС по сравнению со скоростью изменения тока. В случае не учета влияния ЭДС структурная схема приведена на рисунке 1.3
Рисунок 1.3 – Структурная схема контура тока
В этом контуре некомпенсируемая малая постоянная Тm= 0,005 с. Регулятор должен компенсировать все звенья со средними и большими постоянными времени и коэффициенты передачи остальных звеньев в контуре. Кроме того, регулятор должен обладать дополнительно интегрирующими свойствами, его постоянная времени должна быть равна Тот=2Тm. Следовательно:
где Тот=2Тm – постоянная времени контура тока; КТ – коэффициент обратной связи по току.
Таким образом, регулятор тока представляет собой пропорционально-интегральный регулятор. Функциональная схема регулятора тока приведена на рисунке 1.3.
Рисунок 1.3 – Функциональная схема регулятора тока
Расчет регулятора скорости
Составными частями контура регулирования скорости вращения двигателя является объект регулирования, в который входят оптимизированный токовый контур и механическая часть ЭП, датчик скорости и регулятор скорости. Поскольку к исследуемому ЭП не предъявляются высокие требования к точности поддержания скорости, то достаточно будет настроить регулятор скорости на модульный оптимум. При оптимизации контура скорости будем считать, что свернутый контур тока представляем звеном первого порядка. Типовая оптимизированная по модульному оптимуму передаточная функция замкнутого контура имеет вид:
Упрощенная передаточная функция замкнутого контура тока имеет вид:
Приведем структурную схему контура скорости:
Uзс -І ω
-Uc
Рисунок 1.5 – Структурная схема контура скорости
Передаточная функция регулятора скорости:
где ТКС=4Тm=0.02 – постоянная времени контура скорости; КС – коэффициент обратной связи по скорости.
Таким образом, получился П регулятор скорости. Функциональная схема приведена на рисунке 1.5.
Рисунок 1.5 – Функциональная схема регулятора скорости
Рисунок 1.6 – Структурная схема задатчика интенсивности
Принимаем динамический ток двигателя:
Динамический момент двигателя:
Время разгона до номинальной скорости:
В установившемся режиме выходное напряжение задатчика интенсивности равно выходному задающему напряжению.
Примем U0=1 В, UЗ=10 В, тогда:
Рисунок 1.7 – Функциональная схема задатчика интенсивности Расчет регулятора положения
Передаточная функция регулятора будет иметь вид:
Коэффициент передачи регулятора положения:
Коэффициент обратной связи:
где SКР = 400мм – максимально возможное перемещение. VD
BE BC Рисунок 1.8 – Функциональная схема регулятора положения
Полная структурная схема системы подчиненного управления приведена на рисунке 1.9, функциональная схема на рисунке 1.10.
рисунок 1.9 - Полная структурная схема системы подчиненного управления
рисунок 1.10 - функциональная схема системы подчиненного управления
Синтез релейной системы
При разработке системы управления электроприводом определенного класса механизмов возможно успешное применение аналитического конструирования регуляторов, с помощью которого синтезируются структурные схемы управления, обеспечивающие движение электропривода с выполнением заданного критерия качества. Наиболее перспективным для решения задач синтеза систем оптимального управления является метод динамического программирования Р. Беллмана. Применение этого метода с использованием в качестве критерия оптимальности минимума интегральной ошибки позволяет получить алгоритм оптимального управления регулятора, не только оптимизируя принятый функционал качества, но и обеспечивающий устойчивость движения фазовых координат объекта управления. Если силовые части объекта управления описываются линейными дифференциальными уравнениями и в качестве критерия оптимальности принимается минимум интегральной квадратичной ошибки, с помощью указанной методики можно получить алгоритмы оптимальных управлений в функции фазовых координат. Это обеспечивает легкую реализацию такой системы управления, так как все обратные связи оказываются жесткими. Однако статическая ошибка в такой системе, возникающая при наличии статического момента на валу, не равна нулю и по своей величине близка к ошибке однократно интегрирующей линейной системы. В связи с этим актуальным является создание системы с гибкой обратной связью по одной лишь выходной координате. Статизм такой системы равен нулю, что соответствует требованиям. Применение в качестве регуляторов фазовых координат релейных элементов, работающих в скользящем режиме, позволяет без потерь устойчивости получить очень большие коэффициенты усиления. Тем самым обеспечивается не только оптимизация управления, но инвариантность системы к параметрическим возмущениям.
Синтез регулятора скорости
Синтез регулятора скорости производится в том же пространстве, что и регулятора тока. Воспользуемся тем же методом. Матричное уравнение имеет вид:
Управление имеет вид:
Вычисление коэффициентов A13, А23 и А33 произведено с помощью прикладной программы MCAD.
Расчет приведен в приложении Б. Структурная схема контура скорости приведена на рисунке 2.3
Рисунок 2.3 – Структурная схема контура скорости Функциональная схема регулятора скорости такая же, как и регулятора тока, с той лишь разницей, что регулятор скорости формирует задание на регулятор тока. В результате меняются лишь сопротивления, причем принимаем, что входное сопротивление R11=10 кОм, тогда:
Принимаем R12=20 кОм, R13=1.5 кОм, R14=6.8 кОм.
Синтез регулятора положения
Для облегчения дальнейшего синтеза релейного регулятора положения введем относительные координаты:
Приводя замену переменных
где
Минимальное время отработки заданного перемещения позиционным следящим электроприводом (при наличии ограничений на максимальные значения тока и скорости) может быть обеспечено тогда, когда каждая ограничиваемая координата последовательно от входа к выходу объекта управления будет за минимально возможное время выведена на уровень ограничения и останется застабилизированной на этом уровне до тех пор, пока следующая координата не достигнет заданного значения. Качество управления таким электроприводом может быть задано функционалом:
с изменяющимися в отдельных точках траектории движения системы весовыми коэффициентами W11, W22, W33. Эти точки определяют моменты стыковки законов управления, обеспечивающих оптимальную стабилизацию тока, скорости, положения. Оптимальное управление, минимизирующее функционал (2.21) на траекториях движения системы (2.20) при ограничении
Коэффициенты А41, А42, А43, А44 являются коэффициентами функции Ляпунова, полная производная во времени которой, вычисленная в соответствии с системой (2.20), равна подынтегральной функции функционала (2.21) с отрицательным знаком. Построение функции Ляпунова для системы (2.20) приводит к неопределенности, вызванной нулевым корнем характеристического уравнения системы. Этот корень обусловлен наличием в составе силовой части электропривода интегрирующего звена, осуществляющего преобразование угловой скорости вала двигателя в перемещение рабочего органа исполнительного механизма. Для устранения такого рода неопределенности достаточно представить интегрирующее звено с передаточной функцией
В этом случае расчетная система дифференциальных уравнений возмущенного движения (2.20) видоизменится:
где
Матричное уравнение Барбашина для синтеза управляющего воздействия релейного регулятора положения примет вид.
Вычисление коэффициентов Ляпунова А41, А42, А43, А44 произведено с помощью прикладной программы MCAD и имеют следующие значения:
В большинстве систем позиционирования желательно обеспечить траектории наибольшего быстродействия, т.е. сформировать прямоугольный график тока, треугольный (трапецеидальный) – скорости и параболический – положения. Чтобы упростить задатчик, считаем, что переходный процесс позиционирования является процессом второго порядка. Тогда, применительно к данной системе, на траектории наибольшего быстродействия ускорение движения должно изменяться по закону:
где
Структурная схема задатчика траектории, реализующего закон (2.25) приведена на рисунке 2.4
Рисунок 2.4 – Cтруктурная схема задатчика траектории положения
В соответствии с полученными схемами можно определить выходное напряжение регулятора положения:
Решая неравенство относительно сопротивлений
(2.29)
Синтез системы подчиненного управления
1.1 Формулировка требований к системе и расчет параметров объекта управления
Поскольку задачей курсового проекта является сопоставление двух систем – то требование, предъявляемые к ЭП относятся как к линейной, так и к релейной системе управления. Одновременно они должны соответствовать большинству реальных объектов. Таким образом, полагаем, что диапазон регулирования системы должен находиться в составляет D = 50... 10000. В зависимости от схемотехники конкретного преобразователя и узлов системы управления. Кроме того, к динамическим показателям, которые должна обеспечивать система, относятся: 1) постоянство ускорения при пуске и торможении; 2) инвариантность ускорения к координатным возмущениям; 3) перерегулирование тока - не более 30 %; 4) перерегулирование скорости - не более 5%; 5) динамическая просадка скорости при набросе нагрузки не более 2%; Для управления двигателем постоянного тока через преобразователи используем систему последовательной коррекции, система подчиненного регулирования. Преимущество систем с последовательной коррекцией является удобство ограничения любого из регулируемого параметров на заданном уровне. Поддержание заданных параметров на требуемом уровне достигается построением замкнутых систем управления, а повышение качественных показателей введением корректирующих звеньев, регуляторов. При составлении структурной схемы тиристорный возбудитель представляем инерционным звеном первого порядка с передаточной функцией:
где Ктп –коэффициент усиления тиристорного возбудителя; Тμ – постоянная времени тиристорного преобразователя. На рисунке 1.1 приведена структурная схема объекта управления.
-Ic Uз Uп І ω -Е
Рисунок 1.1 - Структурная схема объекта управления
Рисунок 1.2 – Структурная схема линейной системы управления двигателем
Определяем электромагнитную и электромеханическую постоянные времени Тэ и ТМ:
Определяем коэффициент пропорциональности между скоростью и ЭДС двигателя:
Синтез регулятора тока
Внутренний контур образован регулятором тока, тиристорным преобразователем, якорной цепью и замыкается обратной связью по току и коэффициентом передачи Кот. Оптимизированный контур представляет собой составную часть объекта управления в контуре регулирования скорости, от его быстродействия в значительной степени зависят динамические качества системы управления ЭП. В большинстве случаев влиянием ЭДС двигателя на работу внутреннего контура можно пренебречь, ввиду относительно медленного изменения ЭДС по сравнению со скоростью изменения тока. В случае не учета влияния ЭДС структурная схема приведена на рисунке 1.3
Рисунок 1.3 – Структурная схема контура тока
В этом контуре некомпенсируемая малая постоянная Тm= 0,005 с. Регулятор должен компенсировать все звенья со средними и большими постоянными времени и коэффициенты передачи остальных звеньев в контуре. Кроме того, регулятор должен обладать дополнительно интегрирующими свойствами, его постоянная времени должна быть равна Тот=2Тm. Следовательно:
где Тот=2Тm – постоянная времени контура тока; КТ – коэффициент обратной связи по току.
Таким образом, регулятор тока представляет собой пропорционально-интегральный регулятор. Функциональная схема регулятора тока приведена на рисунке 1.3.
Рисунок 1.3 – Функциональная схема регулятора тока
Расчет регулятора скорости
Составными частями контура регулирования скорости вращения двигателя является объект регулирования, в который входят оптимизированный токовый контур и механическая часть ЭП, датчик скорости и регулятор скорости. Поскольку к исследуемому ЭП не предъявляются высокие требования к точности поддержания скорости, то достаточно будет настроить регулятор скорости на модульный оптимум. При оптимизации контура скорости будем считать, что свернутый контур тока представляем звеном первого порядка. Типовая оптимизированная по модульному оптимуму передаточная функция замкнутого контура имеет вид:
Упрощенная передаточная функция замкнутого контура тока имеет вид:
Приведем структурную схему контура скорости:
Uзс -І ω
-Uc
Рисунок 1.5 – Структурная схема контура скорости
Передаточная функция регулятора скорости:
где ТКС=4Тm=0.02 – постоянная времени контура скорости; КС – коэффициент обратной связи по скорости.
Таким образом, получился П регулятор скорости. Функциональная схема приведена на рисунке 1.5.
Рисунок 1.5 – Функциональная схема регулятора скорости
|
||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-03-14; просмотров: 226; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.01 с.) |

 ; (1.1)
; (1.1)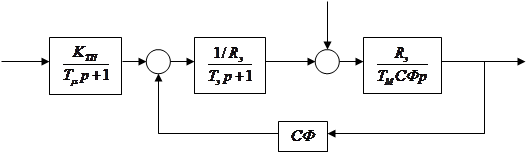

 (1.2)
(1.2) (1.3)
(1.3)
 (1.4)
(1.4)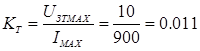 (1.5)
(1.5)

 (1.6)
(1.6) (1.7)
(1.7)
 (1.8)
(1.8) (1.9)
(1.9) (1.10)
(1.10)
 (1.11)
(1.11) (1.12)
(1.12) (1.13)
(1.13) (1.14)
(1.14) (1.15)
(1.15)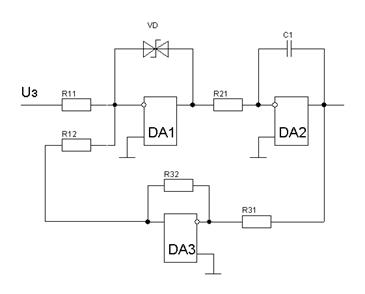
 (1.16)
(1.16) (1.17)
(1.17) (1.18)
(1.18)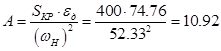 (1.19)
(1.19) (1.20)
(1.20)





 . (2.17)
. (2.17)

 (2.18)
(2.18) ;
;  ;
;  ;
;  ;
;  . (2.19)
. (2.19) , (к=1,…,4), преобразуем уравнения в систему дифференциальных уравнений возмущенного движения:
, (к=1,…,4), преобразуем уравнения в систему дифференциальных уравнений возмущенного движения: (2.20)
(2.20)





 (2.21)
(2.21) имеет вид:
имеет вид: (2.22)
(2.22) в виде звена с передаточной функцией
в виде звена с передаточной функцией  и устремить постоянную времени
и устремить постоянную времени  к бесконечности. При этом справедливо соотношение:
к бесконечности. При этом справедливо соотношение: (2.23)
(2.23) (2.24)
(2.24) .
.




 , (2.25)
, (2.25) – ускорение и его максимальное значение;
– ускорение и его максимальное значение; – линейная скорость движения, формируемая задатчиком;
– линейная скорость движения, формируемая задатчиком; – соответственно задание на положение и выходная величина задатчика.
– соответственно задание на положение и выходная величина задатчика.
 . (2.26)
. (2.26) , получим:
, получим: (2.28)
(2.28)



