Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет задатчика интенсивности скорости
Для разгона и торможения двигателя с динамическим током меньшим тока упора применяют задатчик интенсивности скорости, преобразующий ступенчатый сигнал задания в линейно изменяющийся во времени сигнал. Установившееся значение выходного сигнала задатчика интенсивности – 10 В.
Uзп Uзс
- Рисунок 1.6 – Структурная схема задатчика интенсивности
Принимаем динамический ток двигателя:
Динамический момент двигателя:
Время разгона до номинальной скорости:
В установившемся режиме выходное напряжение задатчика интенсивности равно выходному задающему напряжению.
Примем U0=1 В, UЗ=10 В, тогда:
Рисунок 1.7 – Функциональная схема задатчика интенсивности Расчет регулятора положения
Передаточная функция регулятора будет иметь вид:
Коэффициент передачи регулятора положения:
Коэффициент обратной связи:
где SКР = 400мм – максимально возможное перемещение. VD
BE BC Рисунок 1.8 – Функциональная схема регулятора положения
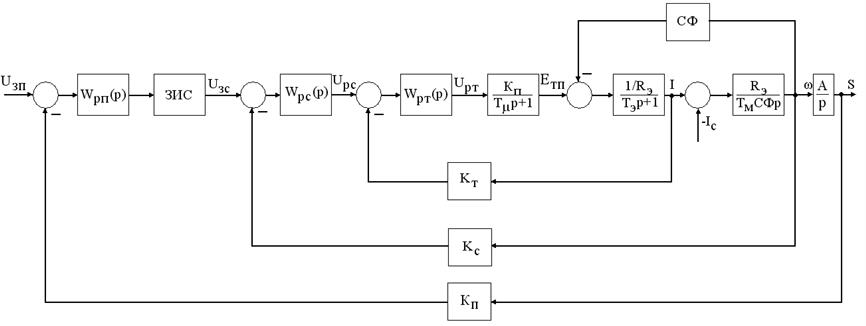
Полная структурная схема системы подчиненного управления приведена на рисунке 1.9, функциональная схема на рисунке 1.10.
рисунок 1.9 - Полная структурная схема системы подчиненного управления
рисунок 1.10 - функциональная схема системы подчиненного управления
Исследование переходных процессов в системе подчиненного управления
Исследование переходных процессов в данной системе произведем с помощью программы «Matlab». Моделирование системы произведем для ее расчетных параметров и для случаев увеличения и уменьшения ТМ и ТЭ в два раза. Математическая модель системы подчиненного управления представлена на рисунке 1.11
Рисунок 1.12 – Переходные процессы при расчетных параметрах
Рисунок 1.13 – Переходные процессы при уменьшении ТЯ в 2 раза
Рисунок 1.14 – Переходные процессы при увеличении ТЯ в 2 раза
Рисунок 1.15 – Переходные процессы при уменьшении ТМ в 2 раза
Рисунок 1.16 – Переходные процессы при увеличении ТМ в 2 раза Моделирование показало, что уменьшение Тя уменьшает колебательность и перерегулирование в системе. Увеличение ТЯ существенно увеличивает колебательность и перерегулирование в системе. При уменьшении ТМ в системе увеличивается перерегулирование, но установившееся значение тока двигателя уменьшается. Увеличение ТМ в 2 раза приводит к увеличению тока двигателя и времени разгона, но в свою очередь значительно уменьшает перерегулирование. Синтез релейной системы
При разработке системы управления электроприводом определенного класса механизмов возможно успешное применение аналитического конструирования регуляторов, с помощью которого синтезируются структурные схемы управления, обеспечивающие движение электропривода с выполнением заданного критерия качества. Наиболее перспективным для решения задач синтеза систем оптимального управления является метод динамического программирования Р. Беллмана. Применение этого метода с использованием в качестве критерия оптимальности минимума интегральной ошибки позволяет получить алгоритм оптимального управления регулятора, не только оптимизируя принятый функционал качества, но и обеспечивающий устойчивость движения фазовых координат объекта управления. Если силовые части объекта управления описываются линейными дифференциальными уравнениями и в качестве критерия оптимальности принимается минимум интегральной квадратичной ошибки, с помощью указанной методики можно получить алгоритмы оптимальных управлений в функции фазовых координат. Это обеспечивает легкую реализацию такой системы управления, так как все обратные связи оказываются жесткими. Однако статическая ошибка в такой системе, возникающая при наличии статического момента на валу, не равна нулю и по своей величине близка к ошибке однократно интегрирующей линейной системы. В связи с этим актуальным является создание системы с гибкой обратной связью по одной лишь выходной координате. Статизм такой системы равен нулю, что соответствует требованиям.
Применение в качестве регуляторов фазовых координат релейных элементов, работающих в скользящем режиме, позволяет без потерь устойчивости получить очень большие коэффициенты усиления. Тем самым обеспечивается не только оптимизация управления, но инвариантность системы к параметрическим возмущениям.
|
|||||||||
|
|
Последнее изменение этой страницы: 2020-03-14; просмотров: 474; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 52.14.150.55 (0.011 с.) |


 (1.11)
(1.11) (1.12)
(1.12) (1.13)
(1.13) (1.14)
(1.14) (1.15)
(1.15)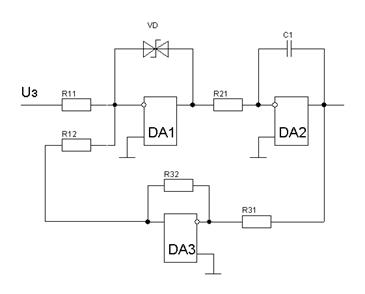
 (1.16)
(1.16) (1.17)
(1.17) (1.18)
(1.18) (1.19)
(1.19) (1.20)
(1.20)