
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Операції над векторами й матрицями
Вирішуючи завдання відображення складних геометричних об’єктів у просторі, необхідно встановити відповідність між точками поверхні геометричного об’єкта й точками плоскої поверхні екрана дисплея. При цьому деякі частині поверхні можуть бути не видимі, можуть відрізнятися умови висвітлення поверхонь, їхні кольори, відбивна здатність і т.п. Все це варто враховувати для побудови реалістичних зображень. Зображення можуть бути нерухомими (статичними) або мінливими в часі (динамічними). Розглянемо основні математичні поняття, які дозволяють задати положення точки в просторі, ребра об’єкта, його поверхню і властивість поверхні. Положення точки в просторі задається за допомогою координат. Значення координат залежать від вибору системи координат і точки початку її відліку. В прямокутній (декартовій системі) координат положення точки задається трьома числами — координатами x, y та z (Рис. 1.1). Ці координати є компонентами вектора, що йде з початку системи координат у задану точку:
Рис. 1.1. Декартова система координат У загальному випадку осі системи координат можуть розташовуватися під довільними, хоча й фіксованих кутах одна до іншої. Для практичних розрахунків набагато зручніше коли ці осі розташовані взаємно перпендикулярно. Така система координат називається ортогональної. В ортогональній системі координат проекцією точки Таким чином, положення в просторі точки
Рис. 1.2. Лівостороння й правобічна системи координат
Вісь
Рис. 1.3. Визначення лівосторонньої системи координат по лівій руці
Будь-яка точка в 3d програмуванні задається набором з 3-х координат по ортогональним (взаємноперпендикулярним) осях (x, y, z) відповідно [15]. Точками задаються також координати вершин об’єкта. Відрізок - частина прямої, що з’єднує дві точки. Задається координатами кінців. Взаємне положення двох точок також задається вектором, спрямованим з однієї точки в іншу. Нехай є крапка A з координатами (Ax, Ay, Az), і точка B з координатами (Bx, By, Bz),тоді вектор з початком у точці A і кінцем у точці B є
Норма (довжина) вектора визначається в такий спосіб:
Довжина вектора є корінь суми квадратів його координат, тобто відстань від початку координат до вершини. Сума векторів – це вектор, координати якого є сумою відповідних координат обох векторів:
Різниця векторів – це вектор, координати якого є різницею відповідних координат обох векторів. Добуток вектора А і скаляра а – це вектор з наступними компонентами:
Скалярний добуток двох векторів – число, що визначається в такий спосіб:
або
де b - кут між векторами. Проекція вектора на вектор – це вектор, що має той самий або протилежний напрямок, що й вектор, на який проводиться проектування. Довжина проекції визначається як відстань між підставам і перпендикулярів, проведених з початкової й кінцевої точок проектованого вектора на другий вектор. Проекція вектора А на вектор В визначається так:
Векторний добуток двох векторів — це вектор, компоненти якого рівні
Векторний добуток спрямований перпендикулярно обом співмножникам. Перенесенням називається наступне перетворення:
Де Матрицею називають таблицю, елементами якої є числа. Визначено операції додавання й множення матриць. Будемо позначати елемент матриці змінною із двома індексами, що визначають номер рядка й номер стовпця: aij.
Результат дії матриці А на вектор С – теж вектор (позначимо його В), компоненти якого розраховуються в такий спосіб:
Добуток двох матри ць А і С є матрицею В, елементи якої обчислюються по формулі
Сума двох матриць також є матрицею, елементи якої сума додавання відповідних елементів матриць-доданків. При обчисленні суми й добутку матриць повинна дотримуватися відповідність розмірів доданків або співмножників. Зворотною стосовно матриці А, називається матриця А -1, що задовольняє умові А-1A=АА-1=I, де I – одинична матриця, тобто матриця, у якої на головній діагоналі розміщені одиниці (ikk =1), а всі інші елементи дорівнюють нулю. Особливу роль у машинній графіці відіграють перетворення – обертання. При описі поворотів тривимірних об’єктів у комп’ютерній графіці зазвичай використається права система координат. Нехай одиничні вектори
Кут повороту вважається позитивним, якщо обертання відповідає позитивному напрямку осі за правилом правого гвинта. Координати вектора, отриманого поворотом вихідного щодо осі х, виходять у результаті дії на нього матриці повороту:
Поворот вектора навколо довільної осі, що проходить через точку початку координат, можна звести до цих трьох типів повороту. Зміна координат вектора при поворотах системи координат щодо її осей описується матрицями, зворотними матрицям Rx, Ry, Rz. Довільна вісь обертання задається координатами:
Вона утворює із віссю z кут φ, а її проекція на площину х0у утворює із віссю х кут θ (Рис. 1.4).
Рис. 1.4. Поворот навколо довільної осі обертання
Поворот навколо довільного вектора можна описати матрицею повороту:
де
Перетворення зрушення можна записати у формі матричного множення, якщо додати в запис вектора четвертий компонент, який дорівнює одиниці (такі координати називаються однорідними)
і перейти до матриць 4x4:
Матриця зрушення буде мати наступний вигляд:
Перетворення загального виду, тобто сполучення повороту зі зрушенням, може бути представлене у вигляді матриці:
При використанні однорідних координат матриця перетворення масштабування виглядає так:
Використання проекцій
При побудові реалістичних об’ємних зображенні варто враховувати ефект перспективи, що полягає в тому, що паралельні лінії, що віддаляються від спостерігача, на відстані здаються людині збіжними. З спостерігачем пов’язана точка спостереження й напрямок спостереження. Ефект перспективи обернено-пропорційний відстані від об’єкта до точки спостереження. Якщо око розташоване далеко від об’єкту, то паралельні лінії про об’єкта будуть здаватися паралельними й спостерігачеві. Якщо приблизитися до об’єкта на досить близьку відстань, ефект перспективи підсилиться
Положення об’єкта задається в системі світових координат. При побудові зображення тривимірного об’єкта світові координати його точок треба перетворювати у двовимірні екранні координати. Проектування – це перехід від світових координат до екранних [25]. Перехід відбувається у два етапи. Є система видових координат, пов’язана зі спостерігачем. Світові координати перетворяться у видові за допомогою видового перетворення, потім видові координати перетворюються в екранні. Це – перспективне перетворення. Тип проектування на плоску, а не викривлену поверхню, де як в якості проекторів використаються прямі. а не скривлені лінії, називається плоскою геометричною проекцією. Плоскі геометричні проекції діляться на два види: центральні й паралельні. Якщо центр проекції перебуває на визначеній відстані від проекційної площини, то проекція - центральна. Якщо ж центр проекції віддалений на нескінченність, то проекція - паралельна. Точкою сходження називається точка перетинання центральних проекцій будь-якої сукупності паралельний прямих, які не паралельні проекційної площини. Існує нескінченна множина точок сходження. Точка сходження називається головної, якщо сукупність прямих паралельна одній з координатних осей. Залежно від того, скільки координатних осей перетинає проекційну площину розрізняють одно-, двох- і трьохточкові проекції. Прямокутні координати точки спостереження у світовій системі координат зв’язані зі сферичними координатами (ρ, φ, θ) наступними співвідношеннями:
Перетворення координат точки з світової системи координат у видову виконується за допомогою перетворення:
де V - матриця перетворення
У паралельних проекціях ігнорується видиме порушення пропорцій, що виникає внаслідок різної віддалі об’єкта та його частин до спостерігача. Це відповідає віддаленню точки спостереження на нескінченну відстань. При цьому паралельні геометричні лінії об’єкта залишаються паралельними й після проектування В перспективних проекціях ефект перспективи враховується [26]. Різновидність паралельної проекції – ортогональна проекція – отримуються ігноруванням z -координати після переходу у видову систему координат. В ізометричній проекції осі х, у и z світової системи координат складають рівні кути із площиною екрана. Матриця ізометричної проекції має вигляд:
У диметричній проекції, що також відноситься до числа ортогональних, вісь z проектується на вісь v екранної системи координат, а проекції осей x і y складають заданий кут а з негативною й позитивною півосями осі u. Диметрична проекція включає ізометричну як частковий випадок [17]. У косокутній проекції осі y i z світової системи координат співпадають з осями u i v екранної системи, а проекція осі х становить заданий кут а з негативною півосю v.
|
||||||||
|
|
Последнее изменение этой страницы: 2020-03-02; просмотров: 248; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.104.248 (0.033 с.) |


 на вісь є єдина точка на осі така, що відрізок прямої, проведеної із цієї точки до точки
на вісь є єдина точка на осі така, що відрізок прямої, проведеної із цієї точки до точки  . Взаємне розташування осей в ортогональній системі координат у тривимірному просторі може бути двох видів. Проведемо вісь
. Взаємне розташування осей в ортогональній системі координат у тривимірному просторі може бути двох видів. Проведемо вісь  з ліва на право, а вісь
з ліва на право, а вісь  знизу вгору, як показано на Рис. 1.2.
знизу вгору, як показано на Рис. 1.2.
 при цьому може проходити як у напрямку від спостерігача в площину листа, так і від площини листа до спостерігача. У першому випадку система координат буде називатися лівої або лівосторонньої, а в другому випадку – правої або правобічної. Існує також легкий спосіб визначення виду системи координат по правій або лівій руці, як показано на Рис. 1.3. Для лівої руки великий, вказівний і середній пальці формують ліву трійку ортогональних векторів. Те ж відноситься і до їхніх циклічних перестановок.
при цьому може проходити як у напрямку від спостерігача в площину листа, так і від площини листа до спостерігача. У першому випадку система координат буде називатися лівої або лівосторонньої, а в другому випадку – правої або правобічної. Існує також легкий спосіб визначення виду системи координат по правій або лівій руці, як показано на Рис. 1.3. Для лівої руки великий, вказівний і середній пальці формують ліву трійку ортогональних векторів. Те ж відноситься і до їхніх циклічних перестановок.
 (1.1)
(1.1) . (1.2)
. (1.2) . (1.3)
. (1.3) (1.4)
(1.4) . (1.5)
. (1.5) . (1.6)
. (1.6) (1.7)
(1.7) . (1.8)
. (1.8) (1.9)
(1.9) – коефіцієнти перенесення по відповідних осях [15].
– коефіцієнти перенесення по відповідних осях [15]. (1.10)
(1.10) (1.11)
(1.11) ,
,  і
і  спрямовані вздовж координатних осей 0x, 0y і 0z. У правій системі координат поворот від вектора
спрямовані вздовж координатних осей 0x, 0y і 0z. У правій системі координат поворот від вектора  до вектора
до вектора  на 900 відповідає повороту гвинта із правим різьбленням, а напрямок вектора
на 900 відповідає повороту гвинта із правим різьбленням, а напрямок вектора  збігається з напрямком переміщення гвинта. Повороти щодо кожної координатної осі на кут а описуються матрицями повороту:
збігається з напрямком переміщення гвинта. Повороти щодо кожної координатної осі на кут а описуються матрицями повороту: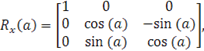 (1.12)
(1.12) (1.13)
(1.13) (1.14)
(1.14) (1.15)
(1.15) (1.16)
(1.16)
 , (1.17)
, (1.17) (1.18)
(1.18) (1.19)
(1.19) (1.20)
(1.20) (1.21)
(1.21) (1.22)
(1.22) (1.23)
(1.23) (1.24)
(1.24) . (1.25)
. (1.25) .(1.26)
.(1.26) (1.27)
(1.27) ,(1.28)
,(1.28) (1.29)
(1.29) (1.30)
(1.30) (1.31)
(1.31) (1.32)
(1.32) (1.33)
(1.33) (1.34)
(1.34)


