Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Момента инерции рабочей машины
Приведенный к валу электродвигателя момент инерции системы J кг∙м2, определяется по формуле
где k – коэффициент, учитывающий момент инерции механической передачи, k = 1,05–1,2; J д – момент инерции ротора электродвигателя, кг ∙ м2; J м – момент инерции вращающихся частей рабочей машины, кг ∙ м2; mм – масса частей рабочей машины, движущихся поступательно, кг; v м – скорость поступательного движения частей рабочей машины, м/с. Момент инерции рабочей машины: Передаточное число редуктора:
где ω – угловая частота ходового колеса, определяется по формуле Вывод. По результатам расчета приведенный момент инерции к валу двигателя составил 5,59 кг∙м2. Задание 6. Расчет и построение механической характеристики электродвигателя. Исследование динамических режимов работы ЭП
Механическая характеристика электродвигателя МД(ω) рассчитывается по формуле Клосса: где S – текущее скольжение; q – параметр. Критическое скольжение, соответствующее максимальному вращающему моменту электродвигателя, может быть принято по каталожным данным электродвигателя или определено по формуле
где m1 – коэффициент, равный отношению кратности максимального и кратности пускового моментов: Параметр q может быть определен по соотношению: Механическую характеристику рассчитывают по формуле Клосса, задаваясь значениями s от 0 до 0,7, с учетом того, что при: s = 0 Мо = 0; s = sн Мо = Мн; s = 0,8 Мо = Мм; s = 1 Мо = Мп. Для построения механической характеристики электродвигателя Мд(ω) пересчитывается скольжение на угловую скорость ω, в каждой точке по формуле
Время разбега и торможения системы под нагрузкой и на холостом ходу может быть определено на основе уравнения движения электропривода:
где Так как аналитическое определение времени разбега tP и времени торможения tT вследствие нелинейности зависимостей Мо(ω) и Мс(ω) весьма затруднительно, то они определяются графоаналитическим или графическим интегрированием уравнения движения электропривода. Эти способы основаны на том допущении, что уравнение движения электропривода вместо бесконечно малых приращений скорости и времени подставляются малые конечные приращения и средние значения момента двигателя и момента сопротивления для каждого периода изменения скорости, т.е.:
Определение времени пуска и торможения ЭП графоаналитичес-ким и графическим методами. Для решения задачи по определению времени разбега и торможения системы, следует по графическим зависимостям Для каждого участка, определяется где Полное время разбега
При одинаковых значениях где n – число участков, на которое разбита кривая избыточного момента; Результаты вычислений сводятся в табл. 2.4. Таблица 2. 4.
Определение числа пусков привода в час. При определении времени пуска графическим методом построение ведется следующим образом. В принятом масштабе mj по оси абсцисс откладывается отрезок ОА рисунок пропорциональный приведённому моменту инерции электропривода J:
Полученные на отдельных участках средние значения избыточного момента откладываются вверх по оси ординат. Так для первого участка получена точка B 1, для второго – B 2 и т. д. Отмеченные точки соединяются прямыми с точкой A. Из начала координат проводится прямая OC параллельная AB 1. Прямая OC характеризует искомую функцию При определении времени пуска графическим методом, масштаб времени
где Время торможения системы определяется аналогично. Нагрузочные диаграммы (рис.2.17) электропривода при пуске и торможении Мд(t), Мс(t), Мизб(t) строятся с использованием зависимости Мд(ω), Мс(ω), Мизб(ω) и ω(t). Координаты отдельных точек нагрузочных диаграммы электродвигателя определяются как точки пересечения значений времени При повторно-кратковременном режиме электродвигатель сильно нагревается из-за повышенных потерь в период пуска. Чтобы это предотвратить, необходимо выполнить условие:
где h – число включений электродвигателя в час; hдоп – допустимое число включений электродвигателя в час.
Рис. 2.17. Нагрузочные диаграммы электропривода при пуске, работе и торможении
Число включений электродвигателя в час, h определяется по формуле где tp и t0 – соответственно продолжительность работы и паузы, мин. Допустимое число включений электродвигателя в час, исходя из условий допустимого нагревания, рассчитывается по формуле: где ΔРн – номинальные электрические потери мощности электродвигателя, Вт; A n – потери энергии при пуске электродвигателя, Дж. Номинальные электрические потери мощности электродвигателя: где α – коэффициент, равный отношению постоянных потерь мощности электродвигателя к переменным ( Потери энергии при пуске электродвигателя ΔAn, Дж:
где iп – кратность пускового тока электродвигателя.
Пример 2.11. Рассчитать механическую характеристику электродвигателя 4А80В4У3. Определить время разбега и торможения системы электродвигатель – транспортер. Приведенный к валу электродвигателя момент инерции системы J = 0,0049 кг×м2. Решение. Механическая характеристика электродвигателя рассчитывается по формуле Клосса (2.6.1). Параметр q определяется по формуле
Отношение кратности максимального и пускового моментов:
Расчет сведен в таблицу механическая характеристика электродвигателя 4А80В4У3. Таблица 2.5 Механическая характеристика электродвигателя
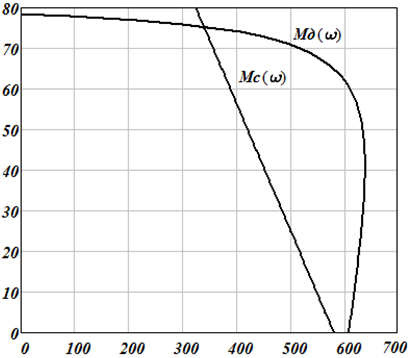
Угловая скорость в каждой точке характеристики определена по формуле (см. 2.6.5). На рис. 2.18. приведены механические характеристики электродвигателя Мд = f1(w) и скребкового транспортера Мс = f2(w), а также Мизб = f3(w). Для каждого участка определяется D ti, по формуле полного время разбега. Расчет сведен в табл. 2.6:
Табл. 2.6. Сводные данные расчета времени разбега системы
Время торможения системы:
Пример 2.12. Построение характеристик электродвигателя. Определение числа пусков. Критическое скольжение, соответствующее максимальному вращающему моменту электродвигателя определяем по формулам:
где m1 – коэффициент, равный отношению кратности максимального и кратности пускового моментов:
Синхронная частота
Номинальное скольжение электродвигателя
Параметр q может быть определен по соотношению
Механическая характеристика электродвигателя Мд (ω) рассчитывается по формуле Клосса:
где s – текущее скольжение. Время разбега и торможения системы под нагрузкой и на холостом ходу может быть определено на основе уравнения движения электропривода
где Мизб – избыточный момент системы, Нм. Построение: Mk:= 600. Присваиваем произвольное значение Время полного разбега и время торможения возьмем из примера выше.
Рис. 2.18. Механическая характеристка двигателя Мд(ω) и механическая храктеристика момента сопротивления Мс(ω)
При повторно-кратковременном режиме электродвигатель сильно нагревается из-за повышенных потерь в период пуска. Чтобы это предотвратить, необходимо выполнить условие
где h – число включений электродвигателя в час; hдоп – допустимое число включений электродвигателя в час. Число включений электродвигателя в час, h определяется по формуле
где tp и t0 – соответственно продолжительность работы и паузы, мин. Допустимое число включений электродвигателя в час, исходя из условий допустимого нагревания, рассчитывается по формуле
где ΔРн – номинальные электрические потери мощности электродвигателя, Вт; Ан – потери энергии при пуске электродвигателя, Дж., β о - коэффициент ухудшения теплоотдачи, принимаем для самовентилируемых двигателей 0,55. Номинальные электрические потери мощности электродвигателя
где α – коэффициент, равный отношению постоянных потерь мощности электродвигателя к переменным (α = 0,5 – 0,6); ηн – КПД двигателя при номинальной нагрузке, примем 0,83. Потери энергии при пуске электродвигателя ΔАп
где iп – кратность пускового тока электродвигателя, для асинхронного двигателя с фазным ротором принимаем равным 2. Вывод: по результатам расчета число допустимых включений в час равно фактическому числу включений в час, следовательно, электродвигатели не будут перегреваться.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2020-03-14; просмотров: 981; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.119.107.96 (0.044 с.) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||











 – избыточный момент системы, Нм;
– избыточный момент системы, Нм;  – угловое ускорение, с–2.
– угловое ускорение, с–2.
 и
и  построить кривую избыточного момента
построить кривую избыточного момента  . Эта кривая избыточного момента заменяется ступенчатой с участками, для которых
. Эта кривая избыточного момента заменяется ступенчатой с участками, для которых  и равен среднему значению
и равен среднему значению  . От числа участков зависит точность расчётов. Точность тем выше, чем на большее число участков разбита кривая
. От числа участков зависит точность расчётов. Точность тем выше, чем на большее число участков разбита кривая  :
:
 – среднее значение избыточного момента на i– м участке.
– среднее значение избыточного момента на i– м участке. , определяется как:
, определяется как:
 на всех участках полное время разбега
на всех участках полное время разбега 
 . (2.6.11)
. (2.6.11) для первого участка. Аналогично производится построение для последующих участков.
для первого участка. Аналогично производится построение для последующих участков. определяется по формуле
определяется по формуле
 – масштабы моментов
– масштабы моментов 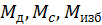 , угловой скорости и момента инерции.
, угловой скорости и момента инерции. из кривой ω(t) и значений моментов Мд,
из кривой ω(t) и значений моментов Мд,  для этих же значений ω.
для этих же значений ω.



 = 0,5 – 0,6).
= 0,5 – 0,6).

 .
.












 Выражаем скольжение через w
Выражаем скольжение через w