Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Асинхронно-синхронный способ.Содержание книги
Поиск на нашем сайте
Предположим, что мы умеем преобразовывать каждый байт в поток единиц и нулей, то есть биты, которые могут быть переданы через среду связи. Обычно, в то время как линия находится в режиме ожидания, для демонстрации того, что линия в порядке, по ней передается единица, обозначая незанятость линии. С другой стороны, когда линия находится в состоянии логического нуля, говорится, что она стоит в режиме выдерживания интервалов. Таким образом, логические единица и ноль рассматриваются соответственно как MARK и SPACE. В асинхронной связи изменение условия состояния линии с MARK на SPACE означает начало символа. Это называется стартовым битом. За стартовым битом следует комбинация битов, представляющая символ, и затем бит контроля четности. Наконец, линия переходит в состояние ожидания MARK, которая представляет собой стоповый бит и означает конец текущего символа. Число битов, используемых для представления символа, называется длиной слова и обычно бывает равно семи или восьми. Контрольный бит используется для выполнения элементарной проверки на наличие ошибки. Длительность каждого бита определяется генераторами тактовых импульсов приемника и передатчика. Отметим, однако, что генераторы в приемнике и передатчике должны иметь одну и ту же частоту, но не требуется, чтобы они были синхронизированы. Методы ввода/вывода информации в МПС и их классификация.
Подсистема ввода/вывода (ПВВ) обеспечивает связь МП с внешними устройствами: v устройства ввода/вывода (УВВ): Ø клавиатура Ø дисплей Ø принтер Ø датчики Ø исполнительные механизмы, АЦП, ЦАП, таймеры и т.п. v внешние запоминающие устройства (ВЗУ): Ø накопители на магнитных дисках Ø "электронные диски" и др.
Обращение к "УВВ" и "ВУ" со стороны процессора осуществляется по одним законам.
ПВВ в общем случае должна обеспечивать выполнение следующих функций: 1) согласование форматов данных, т.к. процессор всегда выдает/принимает данные в параллельной форме, а некоторые ВУ - в последовательной. С этой точки зрения различают устройства параллельного и последовательного обмена. В рамках параллельного обмена не производится преобразование форматов передаваемых слов, в то время как при последовательном обмене осуществляется преобразования параллельного кода в последовательный, и наоборот. Все варианты, когда длина слова ВУ (больше 1 бита) не совпадает с длиной слова МП, сводятся к разновидностям параллельного обмена; 2) организация режима обмена - формирование и прием управляющих сигналов, идентифицирующих наличие информации на различных шинах, ее тип, состояние ВУ (Готово, Занято, Авария), регламентирующих временные параметры обмена. По способу связи процессора и ВУ (активного и пассивного) различают синхронный и асинхронный обмен. При синхронном обмене временные характеристики обмена полностью определяются МП, который не анализирует готовность ВУ к обмену и фактическое время завершения обмена. Синхронный обмен возможен только с устройствами, всегда готовыми к нему (например, двоичная индикация). При асинхронном обмене МП анализирует состояние ВУ и/или момент завершения обмена. Временные характеристики обмена в этом случае могут определяться ВУ; 3) адресную селекцию внешнего устройства.
Классификация методов ввода/вывода I. Под управлением ЦП. • По опросу • По прерыванию II. Под управлением внешних устройств (прямого доступа к памяти).
Метод по опросу подразумевает регулярную проверку процессором готовности к ответу.
Недостатки: · быстродействие очень низкое; · процессор занимается постоянным опросом.
Достоинства: · не требует дополнительной аппаратуры; · можно использовать несколько источников.
Необходимо чтобы процессор и устройства были согласованны по скорости. Эффективность низка, если информация поступает редко (процессор опрашивает, а информации нет).
Подсистема прерываний МПС.
Подсистема прерываний - совокупность аппаратных и программных средств, обеспечивающих реакцию программы на события, происходящие вне программы. Такие события возникают, как правило, случайно и асинхронно по отношению к программе и требуют прекращения (чаще временного) выполнения текущей программы и переход на выполнение другой программы (подпрограммы), соответствующей возникшему событию.
Внутренние прерывания К внутренним событиям относятся переполнение разрядной сетки при выполнении арифметических операций, попытка деления на 0, извлечение корня четной степени из отрицательного числа и т.п., появление несуществующего кода команды, обращение программы в область памяти, для нее не предназначенную, сбой при выполнении передачи или операции в АЛУ и многое другое. Внутренние прерывания должны обеспечиваться развитой системой аппаратного контроля процессора, поэтому они не получили широкого распространения в простых 8- и 16-разрядных МП. Внешние прерывания Внешние прерывания могут возникать во внешней по отношению к процессору среде и отмечать, как аварийные ситуации, так и нормальные рабочие события, которые происходят в случайные моменты времени (нажатие клавиши на клавиатуре, исчерпан буфер принтера или ВЗУ и т.п.). Во всех этих случаях требуется прервать выполнение текущей программы и перейти на выполнение другой программы (подпрограммы), обслуживающей это событие.
Функции подсистемы прерываний и их реализация 1) обнаружение изменения состояния внешней среды (запрос на прерывание); 2) идентификация источника прерывания; 3) разрешение конфликтной ситуации в случае одновременного возникновения нескольких запросов (приоритет запросов); 4) определение возможности прерывания текущей программы (приоритет программ); 5) фиксация состояния прерываемой (текущей) программы; 6) переход к программе, соответствующей обслуживаемому прерыванию; 7) возврат к прерванной программе после окончания работы прерывающей программы.
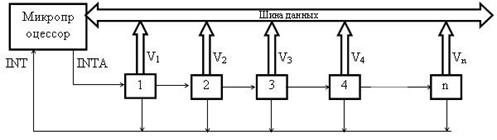
Различают два типа входов запросов на прерывания - радиальные и векторные. Процессор анализирует состояние входов запросов в конце каждого машинного цикла. Получив запрос на прерывание, процессор должен идентифицировать его источник, т.е. в конечном счете, определить начальный адрес обслуживающей это прерывание программы. Способ идентификации зависит от типа входа, на который поступил запрос. Каждый радиальный вход связан с определенным адресом памяти, по которому размещается указатель на обслуживающую программу или сама программа. Если на радиальный вход поступает несколько запросов, то необходимо осуществить программную идентификацию источника путем последовательного (в порядке убывания приоритетов) опроса всех возможных источников прерывания. Этот способ не требует дополнительных аппаратных затрат и одновременно решает проблему приоритета запросов, однако время реакции системы на запрос может оказаться недопустимо велико, особенно при большом числе источников прерываний. Гораздо чаще в современных МПС используется т.н. "векторная" подсистема прерываний. В такой системе микропроцессор, получив запрос на векторном входе INT, выдает на свою выходную линию сигнал подтверждения прерывания INTA, поступающий на все возможные источники прерывания. Источник, не выставивший запроса, никак не реагирует на сигнал INTA. Источник, выставивший запрос, получая сигнал INTA, выдает на системную шину данных "вектор прерывания" – свой номер или адрес обслуживающей программы или, чаще, адрес памяти, по которому расположен указатель на обслуживающую программу. Время реакции МПС на запрос векторного прерывания минимально (1..3 машинных цикла) и не зависит от числа источников. Для исключения конфликтов при одновременном возникновении нескольких запросов на векторном входе ответный сигнал INTA подается на источники запросов не параллельно, а последовательно – в порядке убывания приоритетов запросов. Источник, не выставлявший запроса, транслирует сигнал INTA со своего входа на выход, а источник, выставивший запрос, блокирует дальнейшее распространение сигнала INTA. Таким образом, только один источник, выставивший запрос, получит от процессора сигнал INTA и выдаст по нему свой вектор на шину данных. Более гибко решается проблема организации приоритетов запросов при использовании в МПС специальных контроллеров прерываний. Конфликты на радиальном входе исключаются самим порядком программного опроса источников. Прерывание в общем случае может возникать не только при решении "фоновой" задачи, но и в момент работы другой прерывающей программы, причем не всякую прерывающую программу допустимо прерывать любым запросом. В фоновой задаче так же могут встречаться участки, при работе которых прерывания (все или некоторые) недопустимы. В общем случае в каждый момент времени работы процессора должно быть выделено подмножество запросов, которым разрешено прерывать текущую программу. В МПС эта задача решается на нескольких уровнях. В процессоре обычно предусматривается программно-доступный флаг разрешения/запрещения прерывания, значение которого определяет возможность или невозможность всех прерываний. Для создания более гибкой системы приоритетов программ на каждом источнике прерываний может быть предусмотрен специальный программно-доступный триггер разрешения формирования запроса. В таком случае возможно формирование произвольного подмножества разрешенных в данный момент источников прерываний. В МП: машинный такт - машинный цикл - командный цикл. Рассмотрим возможность прерывания программы по окончанию различных процессов. Учитывая, что прерванная программа должна быть запущена по окончании работы прерывающей с того места, где она была прервана, подсистема прерываний МПС должна обеспечить фиксацию полного состояния прерываемой программы на момент прерывания. При прерывании после текущего машинного такта требуется запоминать не только состояние всех регистров процессора (программно-доступных и системных), но и состояние первичного управляющего автомата. Реализация процедуры фиксации состояния и последующего восстановления потребует значительных затрат дополнительного оборудования и/или времени. Значительный объем информации требуется запоминать и при прерывании программы после текущего машинного цикла (выбранный фрагмент или всю команду, выбранные операнды или сформированные адреса). Поэтому в большинстве МП прерывание может осуществляться после выполнения очередной команды.
Подсистема памяти МПС.
|
||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 670; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.169 (0.007 с.) |