Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Связи. Типы связей. Реакции связей.Содержание книги
Поиск на нашем сайте
Основные задачи статики 1. преобразование разл-х систем силы в более простые и эквивалентные(приведение) 2. определения условия равновесия тв. тел находящихся под действием различных систем сил. Статика - наука о силах и словиях равновесия материальных точек. Система материальных точек - сов-ть мат-ых точек в кот-й положение движения одной зависит от движения многих тел. Абсолютно твердое тело – тело, в котором расстояния между точками остаются неизменными независимо от действующих сил. Сила- мера взаимод 2-х тел лини по которой действует сила,точка приложения Мат точка - геомет точка с определ массой. Связь тела-наперед заданное перемещение тела Эквивалентные системы сил-системы, если их действие одинаково. Равнодействующая сила-сила действие которой эквивалентно системе сил. Уравновешивающая сила-сила равная равнодействующей противоположна по направлению.
2. Аксиомы статики. Аксиома 1. Твердое тело под действием двух сил может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F 1 = - F 2) и направлены вдоль одной прямой в противоположные стороны. Аксиома 2. Действие любой системы сил не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил.
Аксиома 3 (правило параллелограмма). Две силы, приложенные к телу в одной точке, имеют равнодействующую, определяемую диагональю параллелограмма, построенного на этих силах и приложенных в этой же точке. Аксиома 4. Силы взаимодействия двух тел равных по величине направлены в противоположные стороны вдоль одной прямой. Аксиома 5 (принцип освобождения от связи). Несвободное твердое тело можно рассматривать как свободное, если заменить все связи эквивалентными им по воздействию на тело силами, называемыми реакциями связи. Аксиома 6. Равновесие деформируемого тела не нарушится, если тело считать абсолютно твердым. Связи. Типы связей. Реакции связей. Связь- тела, ограничивающие перемещения данного тела. Реакциями связей- с илы, с которыми связи действуют на данное тело.
Система сходящихся сил. Определение равнодействующей (геометрически и аналитически). Система сходящихся сил - система сил, линия действия которых пересекается в одной точке, называемой точкой схода. Равнодействующая – сила, действие которой эквивалентно системе сил.
Геометрически: замкнутый силовой треугольник. Аналитически: R=
Условие равновесия сходящихся сил.
Условия равновесия сист. сходящихся сил: Условия равновесия: геометрическое: замкнутый силовой многоугольник аналитические: Теорема о трех непараллельных силах: Если тв. тело находится в равновесии по действием 3-х не \\ сил лежащх в одной плоскости, то линии действия этих сил пересекаются в одной точке.
Момент силы относительно точки на плоскости. Вектор момент силы относительно точки- это вектор Алгебраическим моментом силы относительно точки называется взятое с определенным знаком произведение модуля силы на плечо.: Плечом силы относительно точки называется кратчайшее расстояние от точки до линии действия силы.
Пара сил и ее момент.
Пара сил – это две силы равные по величине, параллельные и противоположно направленные, не лежащие на одной прямой. Момент пары сил – взятое с определенным знаком произведение модуля одной из сил на плечо. Привило знаков: момент «+» если тело стремиться повернуться протии часовой стрелки. Момент «-»если тело стремиться повернуться по часовой стрелке Свойства пар сил: 1.Не изменяя состояние тела, пару сил можно переносить в любое место плоскости ее действия. 2.У пары сил, не изменяя ее моменты, можно изменять силу (плечо), соответствующим образом меняя плечо (силу). Алгебраическим моментом пары называется произведение модуля сил пары на плечо пары, взятое с определенным знаком. Условие равновесия системы пар сил на плоскость:
Векторная форма. Для равновесия произвольной плоской системы сил необходимо, чтобы суммы проекций на оси координат были равны нулю и сумма моментов всех сил относительно центра О была равна нулю.
R= Mo= Основные задачи кинематики. Основные понятия кинематики.
1) установление матем способов задания движения тел в заданной системе отсчета. 2) Опред-е по заданному движению всех основных кинемат-х характеристик (скор,ускорение,траектория) Кинематика – изучаются геометрические св-ва механического движения тел без учета их масс и действующих на них сил. Траектория – линия по корой движется тело. Тело отсчета- тело относительно которого определяется положение тела. Движение тела считается заданным если в любой момент времени известно положение его точек. 16. Векторный способ задания движения точки. Определение скорости и ускорения. Положение точки на траектории определяется радиус вектором относительно этой точки соединяющей начало точки с центром
Скорость- это векторная величина характер-ая быстроту и направление перемещени или движении точки(м/с)
Ускорение-векторная величина хар-ая быстроту и направление изменения скорости.
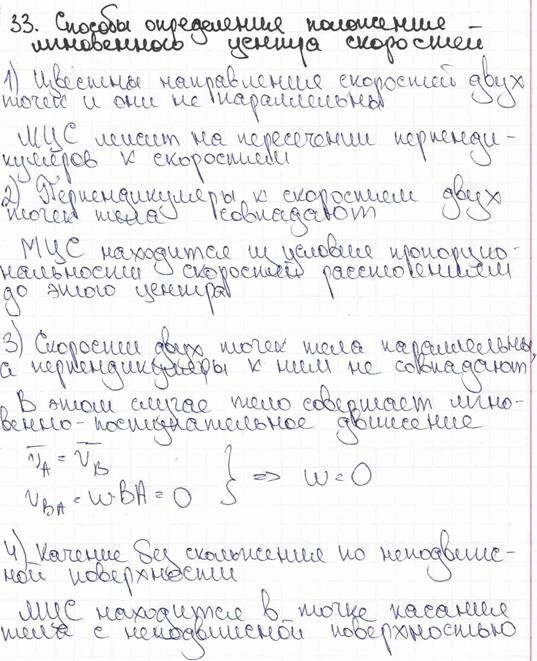
Мгновенный центр скоростей. Мгновенный центр скоростей – точка плоской фигуры, скорость которой в данный момент равна нулю – Р. Если тело движется непоступательно, т.е. w¹0, то мгн.цент.ск. всегда существует. При поступательном движении м.ц.с. находится в ¥. 29. Способы определения положения мгновенного центра скоростей
Аксиомы динамики.
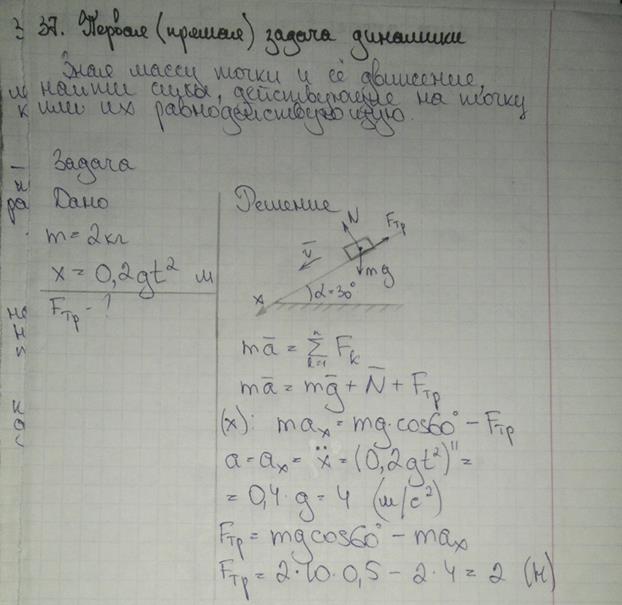
Первая (прямая) задача динамики. Пример.
Вторая (обратная) задача динамики. Пример.
Основные задачи статики 1. преобразование разл-х систем силы в более простые и эквивалентные(приведение) 2. определения условия равновесия тв. тел находящихся под действием различных систем сил. Статика - наука о силах и словиях равновесия материальных точек. Система материальных точек - сов-ть мат-ых точек в кот-й положение движения одной зависит от движения многих тел. Абсолютно твердое тело – тело, в котором расстояния между точками остаются неизменными независимо от действующих сил. Сила- мера взаимод 2-х тел лини по которой действует сила,точка приложения Мат точка - геомет точка с определ массой. Связь тела-наперед заданное перемещение тела Эквивалентные системы сил-системы, если их действие одинаково. Равнодействующая сила-сила действие которой эквивалентно системе сил. Уравновешивающая сила-сила равная равнодействующей противоположна по направлению.
2. Аксиомы статики. Аксиома 1. Твердое тело под действием двух сил может находиться в равновесии тогда и только тогда, когда эти силы равны по модулю (F 1 = - F 2) и направлены вдоль одной прямой в противоположные стороны. Аксиома 2. Действие любой системы сил не изменится, если к ней прибавить или от нее отнять уравновешенную систему сил.
Аксиома 3 (правило параллелограмма). Две силы, приложенные к телу в одной точке, имеют равнодействующую, определяемую диагональю параллелограмма, построенного на этих силах и приложенных в этой же точке. Аксиома 4. Силы взаимодействия двух тел равных по величине направлены в противоположные стороны вдоль одной прямой. Аксиома 5 (принцип освобождения от связи). Несвободное твердое тело можно рассматривать как свободное, если заменить все связи эквивалентными им по воздействию на тело силами, называемыми реакциями связи. Аксиома 6. Равновесие деформируемого тела не нарушится, если тело считать абсолютно твердым. Связи. Типы связей. Реакции связей. Связь- тела, ограничивающие перемещения данного тела. Реакциями связей- с илы, с которыми связи действуют на данное тело.
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 295; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.225.234.128 (0.006 с.) |





 .
.


 равный векторному произведению радиуса-вектора на силы:
равный векторному произведению радиуса-вектора на силы:  =
=  .
.
 плечо.
плечо.

 =0;
=0;  =0;
=0;  =0.
=0. 



 =0
=0 =0
=0 -з-н движения в векторном виде
-з-н движения в векторном виде rx,ry,rz-проекции r на координатные оси
rx,ry,rz-проекции r на координатные оси

 – скорость любой точки плоской фигуры имеет модуль, равный произведению угловой скорости фигуры на длину отрезка, соединяющего точку с м.ц.с., и направлена ^ этому отрезку в сторону вращения фигуры.
– скорость любой точки плоской фигуры имеет модуль, равный произведению угловой скорости фигуры на длину отрезка, соединяющего точку с м.ц.с., и направлена ^ этому отрезку в сторону вращения фигуры.  , скорости точек тела пропорциональны их расстояниям до м.ц.с.
, скорости точек тела пропорциональны их расстояниям до м.ц.с.  , угловая скорость тела равна отношению скорости какой-нибудь точки к ее расстоянию до м.ц.с.
, угловая скорость тела равна отношению скорости какой-нибудь точки к ее расстоянию до м.ц.с.