Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Приведение сил инерции точек МС и тв тела к простейшему виду. Частные случаи приведения.Содержание книги
Поиск на нашем сайте Приведение сил инерции точек МС и тв тела к простейшему виду. Частные случаи приведения. К системе сил инерции точек твердого тела можно применить метод Пуансо – метод приведения сил к некоторому центру, рассмотренный в статике. В динамике за центр приведения сил инерции выбирают обычно центр масс тела С. Тогда в результате приведения получится сила Ф*, равная главному вектору сил инерции точек тела, и пара сил с моментом М*. Главный вектор сил инерции точек твердого тела при любом ее движении: Ф* = –mwc. Остается определить главный момент сил инерции точек тела относительно центра масс. Рассмотрим некоторые случаи движения твердого тела. 1) Поступательное движение. Ф = Ф* = –mwc. 2. Вращение твердого тела, имеющего плоскость материальной симметрии, вокруг неподвижной оси, перпендикулярной к этой плоскости 3. Вращение твердого тела, имеющего плоскость материальной симметрии, вокруг центральной оси, перпендикулярной к этой плоскости. В этом случае ось вращения тела является главной центральной осью инерции тела, так как она проходит через центр масс тел, перпендикулярно к плоскости симметрии Ф* = –JC2ε. 4. Плоское движение твердого тела, имеющего плоскость материальной симметрии.
Динамические реакции при вращении тв тела вокруг неподвижной оси. При движении несвободного твердого тела реакции связей, действующие на это тело, складываются из статических и добавочных динамических составляющих. Re=Reст+Reдин, где Reст − главный вектор статических реакций, Reдин − главный вектор динамических реакций. Статические реакции определяются из уравнений статики, а динамические обусловлены движением тела и определяются только силами инерции. Динамические реакции подшипников при вращении твердого тела вокруг неподвижной оси с учетом принципа д’Аламбера можно определить из следующей системы уравнений
Связи и их уравнения. Классификация связей. По виду своих ур-й связи разделяют на удерживающие и неудерживающие, стационарные и нестационарные. Связь назыв удерживающей или двусторонней если ее ур-е имеет вид строгого равенства. (матем маятник в случае закрепл при пом стержня x2+y2=l2) l –длина стержня, х,у – корд точки. 2 мат точки соед между собой невес жестким стержнем: (x1-x2)2+(y1-y2)2+(z1-z2)2=l2 Если ур-е связи имеет вид равенства-неравенства, то связь – одностор (неудерж). Матем маятник закрепл при пом нити x2+y2≤ l2.Катящееся колесо опорной плоскостью yc-R≥0. Связь (удерж или неуд) назыв стационарной если в ее уравнение время t не входит явным образом, в противном случае связь – нестационарная. Идеальная связь – если возможная работа реакции связи равна 0. Возможные перемещения. Число степеней свободы системы. Виртуальная работа. Идеальные связи Возможные (виртуальные) перемещения системы (ds, dj) — любая совокупность бесконечно малых перемещений точек системы, допускаемых в данный момент наложенными на систему связями. Возможные перемещения рассматривают как величины первого порядка малости, пренебрегая при этом величинами высших порядков малости. Т.е. криволинейные перемещения точек заменяют прямолинейными отрезками, отложенными по касательным к их траекториям. Число независимых между собою возможных перемещений системы называется числом степеней свободы этой системы. Например. шар на плоскости может перемещаться в любом направлении, но любое его возможное перемещение может быть получено как геометрическая сумма двух перемещений вдоль двух взаимно перпендикулярных осей. Свободное твердое тело имеет 6 степеней свободы. Возможная (виртуальная) работа dА — элементарная работа, которую, действующая на матер.точку сила могла бы совершить на возможном перемещении этой точки. Связи являются идеальными, если сумма элементарных работ реакций этих связей при любом возможном перемещении системы равна нулю, т.е. SdАr=0. Общ ур-е динамики. Объединяя принцип Даламбера и принцип возможных перемещений, получим общеe уравнение динамики: при движении системы с идеальными связями в каждый данный момент времен сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы будет равна нулю. Уравнение использует принцип возможных перемещений и принцип Даламбера и позволяет составить дифференциальные уравнения движения любой механической системы. Дает общий метод решения задач динамики. Последовательность составления: а) к каждому телу прикладывают действующие на него задаваемые силы, а также условно прикладывают силы и моменты пар сил инерции; б) сообщают системе возможные перемещения; в) составляют уравнения принципа возможных перемещений, считая систему находящейся в равновесии. Явление резонанса. Явление резонанса возникает при совпадаении частот вынужденных и свободных кол-ний точки p=k. Диф-ное ур-ние:. Частное решение:
х**= Вtcos(kt+d), B=—h/(2k), т.е. общее решение диф-ного ур-ния: х = C1coskt + C2sinkt — —h/(2k)tcos(kt+d). Ур-ние показывает, что амплитуда вынужденных колебаний при резонансе возрастает пропорционально времени. Период Т=2p/k, фаза вынужденных колебаний отстает от фазы возмущающей силы на p/2. Удар по вращающемуся телу. Удар по вращающемуся телу. При исследовании удара по вращающемуся телу кроме теоремы об изменении количества движения приходится использовать и закон моментов. Относительно оси вращения его запишем так Правую часть надо немного преобразовать. Найдем, сначала, интеграл момента ударной силы относительно неподвижной точки О:
При этом предполагалось, что за малое время удара τ радиус-вектор Проектируя результат этого векторного равенства на ось вращения z, проходящую через точку О, получим
В качестве примера рассмотрим удар вращающегося тела о неподвижную преграду. Тело, вращаясь вокруг горизонтальной оси О, ударяется о преграду А (рис.114). Определим ударные импульсы сил, возникающих в подшипниках на оси,
По теореме об изменении количества движения
где скорости центра масс С в начале и конце удара Третье уравнение, по (10), получится в виде И, так как коэффициент восстановления
то Находим импульсы реакции оси:
Обязательно надо обратить внимание на то, что при Место, точка удара, расположенная на этом расстоянии Кстати, заметим, что центр удара совпадает с точкой где приложены равнодействующая сил инерции и вектор количества движения. Вспомним, что при ударе длинной палкой по неподвижному предмету, мы нередко испытывали рукой неприятный ударный импульс, как говорят – «отбивали руку». Нетрудно найти в этом случае центр удара – место, которым следует ударить, чтобы не почувствовать это неприятное ощущение (рис.115).
Рис.115
Так как
Следовательно, центр удара находится на расстоянии трети длины от конца палки. Понятие центра удара учитывают при создании различных ударных механизмов и других конструкций, где встречаются ударные процессы.
Динамика тела переменной массы. Основные понятия. Уравнение Мещерского Одним из достоинств теоремы об изменении количества движения механической системы, как говорилось раньше, является возможность прогнозировать с ее помощью движение тел не только постоянной, но и переменной массы. Такие тела существуют в природе. Это – тающие льдины и айсберги, набирающие по пути на Землю иногда приличную массу градины. За счёт падения на Землю метеоритов на несколько тонн в год изменяется масса Земли. В соответствии с законом сохранения кинетического момента изменяется угловая скорость ее вращения. Значительно больше примеров тел переменной массы можно найти в том, что создано инженерной мыслью. Очень существенно изменяют свою массув полете ракеты и реактивные снаряды. Масса сгорающего в полете топлива составляет существенную часть массы самолета. Довольно быстро изменяют свою массу попавшие на печатный станок рулоны бумаги, бобины с нитью в ткацком станке или бобины магнитофонной ленты при ее перемотке.
Неудивительно, что в 20-м веке стал быстро развиваться новый раздел механики – динамика тел переменной массы. Основоположником этого направления считается профессор Петербургского политехнического института и автор самого популярного в России задачника по теоретической механике Иван Всеволодович Мещерский. Его задачник с некоторыми изменениями и дополнениями переиздается более 80 лет. С помощью этого задачника пытаются научиться решать задачи механики студенты технических вузов и университетов и в настоящее время. Получим и мы вслед за И.В. Мещерским дифференциальное уравнение движения тела переменной массы. Рассмотрим самый простой случай, когда тело движется поступательно и его можно рассматривать, как материальную точку переменной массы. Будем считать: 1. Функция М = М(t), описывающая изменение массы тела, является однозначной, непрерывной и дифференцируемой. 2. Отделяющиеся непрерывно массы dm много меньше основной массы тела – М, движение которой исследуется. Рассмотрим само тело и все частицы, которые отделились от тела за некоторый промежуток времени, как одну систему материальных точек. Это позволяет считать силы взаимодействия между основной и отделяемыми массами внутренними и применить теоремы, полученные для систем материальных точек постоянной массы. Для системы, состоящей из тела массой М и отделяющейся за время dt массы dm, применим теорему об изменении количества ее движения.
Приведение сил инерции точек МС и тв тела к простейшему виду. Частные случаи приведения. К системе сил инерции точек твердого тела можно применить метод Пуансо – метод приведения сил к некоторому центру, рассмотренный в статике. В динамике за центр приведения сил инерции выбирают обычно центр масс тела С. Тогда в результате приведения получится сила Ф*, равная главному вектору сил инерции точек тела, и пара сил с моментом М*. Главный вектор сил инерции точек твердого тела при любом ее движении: Ф* = –mwc. Остается определить главный момент сил инерции точек тела относительно центра масс. Рассмотрим некоторые случаи движения твердого тела. 1) Поступательное движение. Ф = Ф* = –mwc. 2. Вращение твердого тела, имеющего плоскость материальной симметрии, вокруг неподвижной оси, перпендикулярной к этой плоскости 3. Вращение твердого тела, имеющего плоскость материальной симметрии, вокруг центральной оси, перпендикулярной к этой плоскости. В этом случае ось вращения тела является главной центральной осью инерции тела, так как она проходит через центр масс тел, перпендикулярно к плоскости симметрии Ф* = –JC2ε. 4. Плоское движение твердого тела, имеющего плоскость материальной симметрии.
|
||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 955; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.01 с.) |



 (сумма работ всех вн сил на возм переем и всех сил инерции на возм переем равна нулю)
(сумма работ всех вн сил на возм переем и всех сил инерции на возм переем равна нулю) и, после интегрирования за время удара
и, после интегрирования за время удара  ,
,  или
или  где
где  и
и  - угловые скорости тела в начале и в конце удара,
- угловые скорости тела в начале и в конце удара,  - ударные силы.
- ударные силы. .
. считался неизменным, постоянным.
считался неизменным, постоянным. , т.е. интеграл равен моменту вектора импульса ударной силы относительно оси вращения. Закон моментов в преобразованном виде запишется, теперь, так:
, т.е. интеграл равен моменту вектора импульса ударной силы относительно оси вращения. Закон моментов в преобразованном виде запишется, теперь, так: . (10)
. (10) и
и 
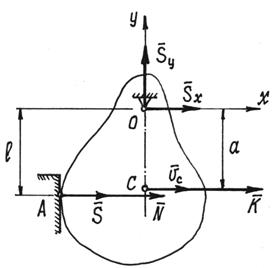 Рис.114
Рис.114 в проекциях на оси х и у получим два уравнения:
в проекциях на оси х и у получим два уравнения:

 Поэтому первое уравнение станет таким
Поэтому первое уравнение станет таким 
 из которого находим
из которого находим 

 (в нашем примере
(в нашем примере  поэтому ударный импульс S > 0, то есть направлен так, как показано на рисунке).
поэтому ударный импульс S > 0, то есть направлен так, как показано на рисунке).

 ударные импульсы в подшипниках оси будут равны нулю.
ударные импульсы в подшипниках оси будут равны нулю. от оси вращения, называется центром удара. При ударе по телу в этом месте ударные силы в подшипниках не возникают.
от оси вращения, называется центром удара. При ударе по телу в этом месте ударные силы в подшипниках не возникают.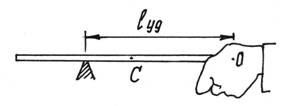
 (l – длина палки) и
(l – длина палки) и  то
то