
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Механічний рух. Відносність руху. Траєкторія. Шлях і переміщення. Швидкість. Додавання швидкостейСодержание книги
Поиск на нашем сайте
Кінематика Механічний рух. Відносність руху. Траєкторія. Шлях і переміщення. Швидкість. Додавання швидкостей Механічний рух – це зміна положення тіла відносно інших тіл або одних його частин відносно інших (людина йде відносно Землі; рух рук відносно тулуба). Механічну форму руху матерії вивчає розділ фізики – «Механіка». Основне завдання механіки – знайти положення тіла в просторі в будь-який момент часу. Механічний рух відбувається у просторі і часі. Поняття простору і часу – фундаментальні поняття, які неможливо визначити через якісь більш прості. Для вивчення механічного руху, що відбувається у просторі і часі, потрібно перед усім уміти вимірювати проміжки часу і відстані. Механічні рухи оточуючих тіл поділяють на: поступальний, обертальний та коливальний Система відліку. Для опису механічного руху, як і інших фізичних процесів, що відбуваються в просторі і часі, використовують систему відліку. Система відліку – це сукупність тіла відліку, пов'язаної з ним системи координат (декартової або іншої) і приладу для відліку часу Систему відліку в кінематиці вибирають, керуючись лише міркуваннями зручності для математичного опису руху. Ніяких переваг однієї системи над іншою в кінематиці не існує. Через складність фізичного світу, вивчаючи пройденне явище, його завжди доводиться спрощувати і замість самого явища розглядати ідеалізовану модель. Так, для спрощення в умовах певних задач розмірами тіл можна знехтувати. Матеріальна точка. Абстрактне поняття, яке замінює тіло, що рухається поступально і розмірами якого можна знехтувати в умовах реальної задачі, називається матеріальною точкою. Залежно від типу траєкторії рухи поділяють на прямолінійні (траєкторія – пряма лінія); рух по колу (траєкторія – коло), криволінійні (довільна крива лінія, зокрема коло). Усі рухи можуть здійснюватися в просторі, площині і по прямій. Найпростіший вид механічного руху – це рух матеріальної точки по прямій лінії (рис.2.1.6) або прямолінійний рух в площині (рис.2.1.7):
Криволінійний рух матеріальної точки в просторі зображено на рис.2.1.8.
Траєкторія. Шлях і переміщення. Розглянемо деякі кінематичні величини. На рис.2.1.8 показано: - характеристику положення матеріальної точки у даній системі відліку – вектор
- траєкторію – лінію руху, яку описує кінець вектора - шлях S – відстань, яку проходить тіло вздовж траєкторії, вимірюється в метрах; - переміщення – вектор Швидкість. Для опису механічного руху треба знати темп руху. Він характеризується швидкістю. Середня швидкість є скалярною величиною і дорівнює відношенню пройденного шляху до часу:
Миттєва швидкість v- дотичний до траєкторії вектор, що визначається за формулою:
Де За характером зміни швидкості рухи поділяються на рівномірний і нерівномірний. З рівномірних рухів в школі вивчають рівномірний прямолінійний і рівномірний рух по колу, з нерівномірних – рівномірний з певною швидкістю на окремих ділянках і середньою на всьому шляху, а також рівнозмінний, за якого швидкість тіла змінюється на одну і ту ж величину протягом будь-яких однакових інтервалів часу. Цю зміну швидкості характеризує ще одна кінематична величина – прискорення. Прискорення – це фізична векторна величина, що дорівнює відношенню зміни швидкості тіла до часу, протягом якого ця зміна відбулась:
У СІ прискорення вимірюють у метрах за секунду в квадраті (м/с2). Додавання швидкостей. Якщо точка бере участь у двох незалежних прямолінійних і рівномірних рухах зі швидкостями Це закон додавання швидкостей: швидкість руху тіла відносно нерухомої системи відліку дорівнює геометричній сумі швидкості цього тіла відносно рухомої системи відліку
Модуль результуючої швидкості човна
Відносність руху. Поняття відносності руху уже випливає з означення механічного руху. Одні тіла рухаються відносно інших. Не буває абсолютного руху або абсолютного спокою. Тіло, відносно якого розглядається зміна положення тіла, називають тілом відліку. Приклади тіл відліку: кімната будинку, купе вагона, Земля для руху супутника, Сонце для руху Землі. Відносність руху означає, що координати тіла, швидкість, вид траєкторії залежать від того, відносно якої системи відліку розглядається рух. Динаміка Сили в природі В механіці маємо справу лише з трьома видами сил: із силою тяжіння, силою пружності і силою тертя. Статика Елементи статики Статика – це розділ механіки, в якому вивчається рівновага тіла на яке діють сили. Сила, якою можна замінити дію декількох сил називається рівнодійною. Рівнодійну силу знаходять, як векторну суму окремих сил (складових), які діють на тіло. Векторну суму на практиці знаходять за правилом паралелограма або трикутника (Рис. 13)
Тіло, яке не обертається, буде перебувати в рівновазі тоді, коли рівнодійна всіх сил, які прикладені до нового, дорівнює нулю:
У координатній формі і алгебраїчна сума проекції сил, прикладених до тіла, на довільну вісь дорівнює нулю:
Тіло, яке може обертатися навколо закріпленої осі, буде перебувати у рівновазі, якщо алгебраїчна сума моментів прикладених до нього сил відносно цієї осі дорівнює нулю:
Момент сили – вектор, який вимірюється добутком сили на плече. Напрям момента сили визначається за правилом свердлика.
В системі СІ за одиницю моменту сили прийнято момент мили в 1Н, який має плече 1м. Момент сили, який обертає тіло за годинниковою стрілкою вважають додатним, а момент сили, який обертає тіло проти годинникової стрілки –від’ємним. Центром ваги тіла називається точка прикладання сили тяжіння, що діє на тіло. В однорідному полі сил тяжіння центр ваги і центр мас співпадають. Розрізняють такі види рівноваги тіл: стійка, нестійка, байдужа. Стійка рівновага (Рис.14).
Рисунок 14 При малому відхилені тіла від сил, прикладених до тіла, повертає його в положення рівноваги(Рис.15). Нестійка рівновага (Рис.16).
Рисунок 16 Байдужа рівновага (Рис.18).
Рисунок 18 При будь-якому відхилені тіло буде залишатися у рівновазі.
В положенні стійкої рівноваги центр тяжіння знаходиться на мінімальній висоті. В положенні стійкої рівноваги тіло має мінімальну потенціальну енергію. Механічні пристрої, які використовуються для перетворення сили, називається механізмами. До простих механізмів відносять важіль, похилу площина, клин, гвинт, блок, коловорот і т. д. В більшості випадків прості механізми застосовують для отримання виграшу у силі. Жоден із простих механізмів не дає виграшу в роботі. «Золоте правило механіки» - при використанні простих механізмів у скільки разів виграємо в силі, у стільки разів програємо у відстані. Важіль буде у рівновазі, коли алгебраїчна сума моментів усіх сил, що діють на нього відносно осі обертання, дорівнює нулю.
Приклади розв’язання задач 1. Визначити рівнодійну трьох сил, величина кожної з яких становить200 Н, якщо кути між першою та другою і другою та третьою силами дорівнює 60 градусів.
Розв’язання:
R13=F1cos α +F3cos α =Fcos α = 400 (1/2)=200H Рівнодійна трьох сил R= 200+200=400H Відповідь: R=400H. 2. Дошка, маса якої 10кг, підперта на відстані Розв’язання:
Під дією прикладання сил дошка може обертатися навколо нерухомої осі О. Моменти сил, які обертають дошку за годинниковою стрілкою, вважають додатними:
Тоді величина прикладених сил:
Запишемо правило моментів:
Врахувавши Отже, Щоб знайти реакцію опори N, проектуємо усі сили, прикладені до дошки на вісь У. Тоді
Відповідь: Список джерел інформації 1.Сиротюк В.Д. Фізика; підручник для 10 класів загальноосвітніх навчальних закладів (рівень стандарту), 2010 2. В.Ф. Дмитрієва. Фізика; навчальний посібник для студентів вищих навчальних закладів 1-2 рівнів акредитації, 2008 3. Кирик Л.А. Фізика 10 клас. Запитання, задачі, тести (рівень стандарту), 2010 4. Кирик Л.А. Фізика 10 клас. Різнорівневі самостійні та тематичні контрольні роботи (рівень стандарту), 2010 5. Збірник різнорівневих завдань для державної підсумкової атестації з фізики Кінематика Механічний рух. Відносність руху. Траєкторія. Шлях і переміщення. Швидкість. Додавання швидкостей Механічний рух – це зміна положення тіла відносно інших тіл або одних його частин відносно інших (людина йде відносно Землі; рух рук відносно тулуба). Механічну форму руху матерії вивчає розділ фізики – «Механіка». Основне завдання механіки – знайти положення тіла в просторі в будь-який момент часу. Механічний рух відбувається у просторі і часі. Поняття простору і часу – фундаментальні поняття, які неможливо визначити через якісь більш прості. Для вивчення механічного руху, що відбувається у просторі і часі, потрібно перед усім уміти вимірювати проміжки часу і відстані. Механічні рухи оточуючих тіл поділяють на: поступальний, обертальний та коливальний Система відліку. Для опису механічного руху, як і інших фізичних процесів, що відбуваються в просторі і часі, використовують систему відліку. Система відліку – це сукупність тіла відліку, пов'язаної з ним системи координат (декартової або іншої) і приладу для відліку часу Систему відліку в кінематиці вибирають, керуючись лише міркуваннями зручності для математичного опису руху. Ніяких переваг однієї системи над іншою в кінематиці не існує. Через складність фізичного світу, вивчаючи пройденне явище, його завжди доводиться спрощувати і замість самого явища розглядати ідеалізовану модель. Так, для спрощення в умовах певних задач розмірами тіл можна знехтувати. Матеріальна точка.
|
||||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 1548; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.83.69 (0.009 с.) |


 , проведений з початку координат у точку її розміщення (у шкільному курсі фізики положення тіла (матеріальної точки) задають переважно за допомогою координат х, у, z;
, проведений з початку координат у точку її розміщення (у шкільному курсі фізики положення тіла (матеріальної точки) задають переважно за допомогою координат х, у, z; , проведений з початкової точки траєкторії в кінцеву (його часто позначають через S).
, проведений з початкової точки траєкторії в кінцеву (його часто позначають через S). .
.
 - нескінченно мале переміщення матеріальної точки;
- нескінченно мале переміщення матеріальної точки;  t нескінченно малий проміжок часу, за який це переміщення здійснено. Миттєву швидкість показує спідометр автомобіля.
t нескінченно малий проміжок часу, за який це переміщення здійснено. Миттєву швидкість показує спідометр автомобіля.
 1 і
1 і 
 1 і швидкості самої рухомої системи відліку
1 і швидкості самої рухомої системи відліку 







 . Плечем сили називають найкоротшу відстань перпендикуляр від осі обертання тіла до прямої, вздовж якої діє на нього сила (Рис. 13).
. Плечем сили називають найкоротшу відстань перпендикуляр від осі обертання тіла до прямої, вздовж якої діє на нього сила (Рис. 13).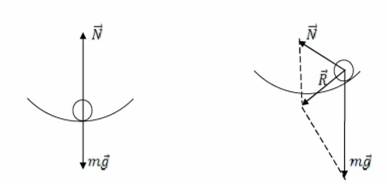 Рисунок 15
Рисунок 15


 Рівнодійну сил
Рівнодійну сил  і
і  визначаємо за правилом паралелограма.
визначаємо за правилом паралелограма.
 її довжини, яку силу перпендикулярно, до дошки, треба прикласти до її короткого кінця, щоб утримати дошку у рівновазі. Якою буде сила реакції опори, якщо прикласти цю силу?
її довжини, яку силу перпендикулярно, до дошки, треба прикласти до її короткого кінця, щоб утримати дошку у рівновазі. Якою буде сила реакції опори, якщо прикласти цю силу?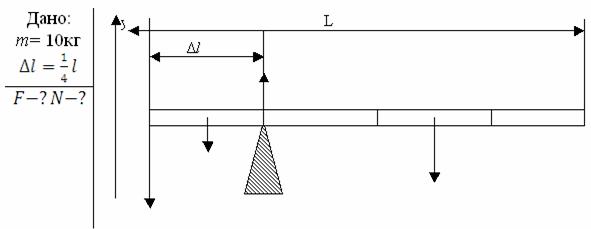
 ,
,  ,
, 



 ,
, 


 ,
,  =49Н
=49Н


