
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Пространственная система сил. Уравнения равновесия.Содержание книги Поиск на нашем сайте Аксиомы статики Понятие и особенности твердого тела, равновесия, силы. Содержание аксиом статики, выведенных в результате обобщений многочисленных опытов и наблюдений за равновесием и движением тел. Изучение направления реакции связи, препятствующей перемещению тела. 3. Связи и их реакции
Тела в природе бывают свободными и несвободными. Тела, свобода перемещения которых ничем не ограничена, называются свободными. Тела, ограничивающие свободу перемещения других тел, называются по отношению к ним связями.
Одним из основных положений механики является принцип освобождаемости от связей, согласно которому несвободное тело можно рассматривать как свободное, если отбросить действующие на него связи и заменить их силами – реакциями связей. 4. Система сил, линии действия которых лежат в одной плоскости и все пересекаются в одной точке, называется плоской системой сходящихся сил. Теорема Плоская система сходящихся сил в общем случае эквивалентна равнодействующей, которая равна векторной сумме этих сил; линия действия равнодействующей проходит через точку пересечения линий действия составляющих. 5.
Fx= Fcosα; Px= Pcosβ= P⋅ cos90o=0; Rx=Rcosγ = -R⋅ cos(180o-γ).
6. Две параллельные силы, равные по величине и направленные в противоположные стороны, называются парой сил (фиг.30, а). Расстояние d между линиями действия сил пары называется плечом пары. Пару сил нельзя заменить и уравновесить одной силой. Уравновесить пару сил можно только другой парой. Пара сил, приложенная к твердому телу, вызывает его вращение, характеризующееся моментом пары. Моментом пары сил называется взятое со знаком (+) или (-) произведение величины одной из сил на ее плечо:m = ±Pd. Момент пары считается положительным, если пара стремится вращать тело против вращения часовой стрелки. Пару сил принято изображать изогнутой стрелкой (фиг.30, б). Буква у конца стрелки обозначает момент пары. Условие равновесия пар: для равновесия нескольких пар необходимо и достаточно, чтобы алгебраическая сумма их моментов была равна нулю. 7. Если под действием приложенной силы твердое тело может совершать вращение вокруг некоторой точки, то для того, чтобы охарактеризовать вращательный эффект силы вводится понятие – момент силы относительно точки (или центра).
Моментом силы относительно точки (рисунок 1.1) называется векторное произведение радиус-вектора точки приложения силы на вектор силы. Mo(F) = r ⊗ F 8. Плоской системой произвольно расположенных сил называется система сил, линии, действия которых лежат в одной плоскости, но не пересекаются в одной точке (рис. 1.21). Для того чтобы привести данную систему произвольно расположенных сил к произвольно выбранной точке О (см. рис. 1.21), необходимо: 1) перенести по очереди каждую силу в эту точку; 2) уравновесить силы (F1', F2’, F3’) силами. (F1'’, F2’’, F3’’) В результате приведения сил (F1, F2, F3) к точке О получили новую систему сил, состоящую из плоской системы сходящихся сил (F1,F2,F3), которые равны и параллельны данным силам, т.е. F1'= F1, F2,= F2’, F3' = F3 . (1.1)
В результате приведения получили еще одну систему пар сил
9.Существуют виды опор балок (рис. 7.2): шарнирно неподвижная опора; шарнирно подвижная опора; жесткая заделка.
ШАРНИРНО НЕПОДВИЖНАЯ ОПОРА Шарнирно неподвижная опора (рис. 7.2, а, опора А) - это закрепление конца балки, при котором балка может поворачиваться, но не может перемещаться ни в горизонтальном (влево или вправо), ни в вертикальном (вверх или вниз) направлениях, то есть не может перемещаться ни в каком направлении. В шарнирно неподвижной опоре может возникнуть реакция, которую удобно представить в виде двух составляющих: вертикальной ( Шарнирно неподвижная опора на расчетной схеме условно изображается посредством двух стерженьков. Нижние их концы шарнирно прикреплены к «земле», а верхние концы соединены между собой и с балкой шарниром. ШАРНИРНО ПОДВИЖНАЯ ОПОРА Шарнирно подвижная опора (рис. 7.2, б, опора B) - это устройство, в котором конец балки может свободно перемещаться в горизонтальном направлении, может поворачиваться при изгибе, но не может перемещаться в вертикальном направлении. Со стороны шарнирно подвижной опоры может возникнуть только вертикальная реакция ( ЖЕСТКАЯ ЗАДЕЛКА Жесткая заделка - это закрепление (рис. 7.2, в), при котором конец балки не может ни поворачиваться, ни перемещаться. В заделке могут возникнуть реактивный момент
10. НАГР? УЗКА электрическая, НАГР? УЗКИ, в строительной механике — внешние воздействия на сооружение (статические и динамические, постоянные и временные), вызывающие деформации и изменение напряженного состояния в его элементах. Помимо внешних нагрузок (снеговых, ветровых, технологических, изменений температуры и др.), при расчетах учитывается собственный вес сооружения.
12. Геометрические характеристики плоских сечений. Метод определения. Геометрические характеристики – числовые величины (параметры), определяющие размеры, форму, расположение поперечного сечения однородного по упругим свойствам деформируемого элемента конструкции (и, как следствие, характеризующие сопротивление элемента различным видам деформации).
Характеристики:
Статическим моментом плоского сечения относительно некоторой оси называется, взятая по всей его площади А, сумма произведений площадей элементарных площадок dA на их расстояния от этой оси
C - Центр тяжести плоских сечений A - площадь сечения Ix , Iy - осевые моменты инерции сечения относительно главных осей; IxI , IyI - осевые моменты инерции относительно вспомогательных осей Ip - полярный момент инерции сечения Wx , Wy - осевые моменты сопротивления Wp - полярный момент сопротивления
Механические напряжения. Механическое напряжение — это мера внутренних сил, возникающих в деформируемом теле, под влиянием различных факторов. Механическое напряжение в точке тела определяется как отношение внутренней силы к единице площади в данной точке рассматриваемого сечения. Напряжения являются результатом взаимодействия частиц тела при его нагружении. Внешние силы стремятся изменить взаимное расположение частиц, а возникающие при этом напряжения препятствуют смещению частиц, ограничивая его в большинстве случаев некоторой малой величиной.
Расчеты на прочность. Чистый сдвиг в реальных конструкциях реализовать крайне сложно, так как вследствие деформации соединяемых элементов происходит дополнительный изгиб стержня, даже при сравнительно небольшом расстоянии между плоскостями действия сил. Однако в ряде конструкций нормальные напряжения в сечениях малы и ими можно пренебречь. Проверочный расчет Порядок проверочного расчета на устойчивость выглядит так: – исходя из известных размеров и формы поперечного сечения и условий закрепления стержня, вычисляем гибкость; – по справочной таблице находим коэффициент понижения допускаемого напряжения, затем определяем допускаемое напряжение на устойчивость; – сравниваем максимальное напряжение с допускаемым напряжением на устойчивость. Проектировочный расчет При проектировочном расчете (подобрать сечение под заданную нагрузку) в расчетной формуле имеются две неизвестные величины – искомая площадь поперечного сечения A и неизвестный коэффициент φ (так как φ зависит от гибкости стержня, а значит и от неизвестной площади A). Поэтому при подборе сечения обычно приходится пользоваться методом последовательных приближений: – обычно в первой попытке принимают φ1 = 0,5…0,6 и определяют площадь сечения в первом приближении
– по найденной площади A1 подбирают сечение и вычисляют гибкость стержня в первом приближении λ1. Зная λ, находят новое значение φ′1; – далее, используя найденный φ′1, проверяют условие устойчивости, и если σmaxmax и [σу] значительно отличаются друг от друга (более чем на 5 %), следует повторить расчет, приняв во второй попытке
Аксиомы динамики Содержание темы: Основные аксиомы динамики. Понятие о трении и коэффициенте полезного действия. Работа и мощность при поступательном и вращательном движении. Потенциальная и кинетическая энергия. Моменты инерции однородных тел. Динамика есть часть теоретической механики, изучающая механическое движение тел в зависимости от сил, влияющих на это движение. Динамика основывается на ряде положений, являющихся аксиомами и называющимися законами динамики. Первый закон динамики, называемый аксиомой инерции или первым законом Ньютона, в применении к материальной точке формулируется так: изолированная материальная точка либо находится в покое, либо движется прямолинейно и равномерно. Было установлено, что при прямолинейном равномерном движении ускорение материальной точки равно нулю, т.е. изолированная материальная точка не может сама себе сообщить ускорение. Это свойство тел называется инерцией или инертностью. Можно сказать, что инерция или инертность есть способность тела сохранять свою скорость по модулю и направлению неизменной, в том числе и скорость равную нулю. Изменить скорость, т.е. сообщить ускорение, может лишь приложенная к телу сила.. Зависимость между силой и сообщаемым этой силой ускорением устанавливает второй закон динамики или второй закон Ньютона: ускорение, сообщаемое материальной точке силой, имеет направление силы и пропорционально ее модулю Сила Инерции Си́ла ине́рции (также инерционная сила) — многозначное понятие, применяемое в механике по отношению к трём различнымфизическим величинам. Одна из них — «даламберова сила инерции» — вводится в инерциальных системах отсчёта для получения формальной возможности записи уравнений динамики в виде более простых уравнений статики. Другая — «эйлеровасила инерции» — используется при рассмотрении движения тел в неинерциальных системах отсчёта. Наконец, третья — «Ньютонова сила инерции» — сила противодействия, рассматриваемая в связи с третьим законом Ньютона[1][2][3]. Общим для всех трёх величин является их векторный характер и размерность силы. Кроме того, первые две величины объединяет возможность их использования в уравнениях движения, по форме совпадающих с уравнением второго закона Ньютона[1]. При повороте кривошипа на равные углы ползун проходит неравные участки пути - это легко обнаружить, если на одном чертеже изобразить механизм в последовательно занимаемых им положениях. Таким образом, равномерное вращение кривошипа преобразуется в неравномерное возвратно-поступательное движение ползуна. Кривошипно-шатунные механизмы Кривошипно-шатунные механизмы служат для преобразования вращательного движения в возвратно-поступательное и наоборот. Основными деталями кривошипно-шатунного механизма являются: кривошипный вал, шатун и ползун, связанные между собой шарнирно (а). Длину хода ползуна можно получить любую, зависит она от длины кривошипа (радиуса). Если длину кривошипа мы обозначим через букву А, а ход ползуна через Б, то можем написать простую формулу: 2А = Б, или А = Б/2. По этой формуле легко найти и длину хода ползуна и длину кривошипа. Например: ход ползуна Б = 50 мм, требуется найти длину кривошипа А. Подставляя в формулу числовую величину, получим: А = 50/2 = 25 мм, то есть длина кривошипа равна 25 мм.
33.Кулачковый механизм- Кулачко́вый механи́зм — механизм, образующий высшую кинематическую пару, имеющий подвижное звено, совершающее вращательное движение, — кулак (кулачок), с поверхностью переменной кривизны или имеющей форму эксцентрика, взаимодействующей с другим подвижным звеном — толкателем, если подвижное звено совершает прямолинейное движение, или коромыслом, если подвижное звено совершает качание. Кулак, совершающий прямолинейное движение, называется копиром. 34. Мальтийский механизм- механизм прерывистого движения, преобразующий равномерное вращательное движение в прерывистое вращательное движение. Мальтийские механизмы бывают с внешним и внутренним зацеплением, и, как правило, с числом пазов от 3 до 12. Основное применение механизм получил в кинопроекторах в качестве скачкового механизма для прерывистого перемещения киноплёнки на шаг кадра[1]. Механизм преобразует равномерное вращение ведущего вала в скачкообразное вращение ведомого, на котором закреплён скачковый барабан, непосредственно осуществляющий прерывистое перемещение киноплёнки. Мальтийский механизм имеет намного большие габариты и массу, нежели грейферные скачковые механизмы. Однако, по сравнению с ними обеспечивает меньшее и более равномерное воздействие на перфорацию киноплёнки при более высоком КПД[1]. Благодаря меньшей нагрузке на перфорацию и, как следствие, меньшему износу фильмокопии по сравнению с грейфером, мальтийский механизм применяется в большинстве кинопроекторов, рассчитанных на киноплёнку 35-мм и 70-мм. 35. Храповый механизм. зубчатый механизм прерывистого движения, предназначенный для преобразования возвратно-вращательного движения в прерывистое вращательное движение в одном направлении. Проще говоря, храповик позволяет оси вращаться в одном направлении и не позволяет вращаться в другом. Храповые механизмы используются достаточно широко — например, в турникетах,гаечных ключах, заводных механизмах, домкратах, лебёдках, замках наручников и т. д. Храповик обычно имеет форму зубчатого колеса с несимметричными зубьями, имеющими упор с одной стороны. Движение колеса в обратную сторону ограничивается собачкой, которая прижимается к колесу пружиной или под собственным весом.
Храповые механизмы
Червячная передача
С уменьшением полезной нагрузки к.п.д. значительно снижается, так как возрастает относительное влияние постоянных потерь (близких к потерям холостого хода), не зависящих от нагрузки; механическое устройство для передачи вращения между скрещивающимися (обычно под прямымуглом) валами посредством червяка (винта) и сопряжённого с ним червячного колеса. Червяк (см. рис. 2, впри ст. Детали машин ) представляет собой винт с трапецеидальной или близкой к ней резьбой (См. Резьба),а червячное колесо является зубчатым колесом (См. Зубчатое колесо), зубья которого имеют особуюдугообразную форму. Червячное колесо охватывает червяк на некоторой дуге (обычно до 100°). Ведущим вЧ. и. является обычно червяк, ведомым — червячное колесо; в редких случаях (для повышающих передач)ведущим может быть червячное колесо. В наиболее распространённых Ч. п. используются цилиндрическиечервяки; червяки с витками на тороидной поверхности применяются в глобоидных передачах (См.Глобоидная передача). В зависимости от числа заходов резьбы (ниток нарезки) различают одно-, двух- ичетырёхзаходные червяки; по форме профиля витка — архимедовы, с вогнутым профилем и др. червяки.Витки архимедовых червяков в осевом сечении очерчены трапецией и легко изготовляются точением.Перспективны червяки с вогнутым профилем витков резьбы, обеспечивающим меньшие контактныенапряжения и лучшие условия для образования масляного клина. Для силовых передач (См. Силоваяпередача) предпочтительны эвольвентные червяки, профиль витка которых в поперечном сечении очерченпо эвольвенте (см. Эволюта и эвольвента). Передаточное число Ч. п. i = z 2 /z 1, где z 1 — число заходов резьбычервяка, z 2 — число зубьев червячного колеса. Обычно передаточное число Ч. п. равно 8—100 (в ряде случаев, например в приводах станочныхстолов большого диаметра, до 1000). Благодаря возможности получения больших передаточных чисел присравнительно небольшом габарите передачи Ч. п. применяются в Приводахмашин, устройствах управленияи др. Достоинства Ч. п. — плавность и бесшумность работы. Ч. п. могут быть самотормозящими, т. е.передающими вращение только от червяка к колесу, что иногда даёт возможность выполнить механизм безтормозного устройства. Недостаток Ч. п. — значительное относительное скольжение сопряжённых элементов— витков червяка и зубьев колеса. Это вызывает усиленное тепловыделение, повышенный износ исклонность к заеданию, определяет сравнительно низкий кпд (в среднем 0,7—0,75 в однозаходной передаче,0,8— 0,85 в двухзаходной, 0,86—0,92 в четырёхзаходной). Для уменьшения износа и повышениясопротивляемости заеданию червячные колёса изготовляют из материалов с высокими антифрикционнымисвойствами, главным образом из бронзы: оловянистой (при скоростях скольжения 5—35 м/сек)иалюминиево-железистой (при скоростях скольжения до 10 м/сек). Для экономии цветных металлов их делаютсоставными: бронзовый венец (обод) устанавливается на стальную или чугунную ступицу. При скоростяхскольжения до 2 м/сек и больших диаметрах колёса можно отливать целиком из чугуна. В приборах инебольших силовых передачах могут использоваться колёса из текстолита, полиамидов и т.п. Червякиобычно изготовляют из качественных углеродистых или легированных сталей, термически обработанных довысокой твёрдости. Для повышения качества поверхности червяки шлифуют и полируют. Пониженный кпд и значительное тепловыделение ограничивают применение Ч. п. областью небольшихи ср. мощностей (обычно до 50, реже до 200 квт). Они используются в подъёмно-транспортных машинах,металлорежущих станках, автомобилях, троллейбусах, металлургических машинах, гидротехническихсооружениях и т.д. Основное применение имеют закрытые хорошо смазываемые Ч. п. в виде червячныхРедукторов.
40. Червя́чная переда́ча (зубчато-винтовая передача) — механическая передача, осуществляющаяся зацеплением червяка и сопряжённого с ним червячного колеса[1]. Передача предназначена для существенного увеличения крутящего момента и, соответственно, уменьшения угловой скорости. Ведущим звеном является червяк. Червячная передача без смазки и вибрации обладает эффектом самоторможения и является необратимой: если приложить момент к ведомому звену (червячному колесу), из-за сил трения передача работать не будет.Передаточные отношения червячной передачи закладываются в пределах от 8 до 100, а в некоторых случаях — до 1000[1]. 41. Ременная передача — это передача механической энергии при помощи гибкого элемента — приводного ремня, за счёт сил трения или сил зацепления (зубчатые ремни). Может иметь как постоянное, так и переменное передаточное число (вариатор), валыкоторого могут быть с параллельными, пересекающимися и со скрещивающимися осями. Состоит из ведущего и ведомого шкивов и ремня (одного или нескольких). 43. Ось — деталь машин и механизмов, служащая для поддержания вращающихся частей, но не передающая полезный крутящий момент. Оси бывают вращающиеся (а) и неподвижные (б). Вращающаяся ось устанавливается в подшипниках. Примером вращающихся осей могут служить оси железнодорожного подвижного состава, примером невращающихся – оси передних колес автомобиля. Вал — деталь машин, предназначенная для передачи крутящего момента вдоль своей осевой линии. В большинстве случаев валы поддерживают вращающиеся вместе с ними детали (зубчатые колеса, шкивы, звездочки и др.). Некоторые валы (например, гибкие, карданные, торсионные) не поддерживают вращающиеся детали. Валы машин, которые кроме деталей передач несут рабочие органы машины, называются коренными. Коренной вал станков с вращательным движением инструмента или изделия называется шпинделем. Вал, распределяющий механическую энергию по отдельным рабочим машинам, называется трансмиссионным. В отдельных случаях валы изготовляют как одно целое с цилиндрической или конической шестерней (вал—шестерня) или с червяком (вал — червяк). 44. Подшипники скольжения – это опоры вращающихся деталей, работаю- щие в условиях скольжения цапфы по поверхности подшипника. По направле- нию воспринимаемой нагрузки подшипники скольжения разделяют на две ос- новные группы: радиальные (см. рис. 1, в), предназначенные для восприятия нагрузки, перпендикулярной оси вала, и упорные (см. рис. 1, г, д) – для воспри- ятия осевой нагрузки. При совместном действии радиальной и сравнительно небольшой осевой нагрузок применяют конические опоры (см. рис. 1, б) или совмещенные опоры, в которых осевую нагрузку воспринимают торцы вкла- дышей 42. Цепная передача — это передача механической энергии при помощи гибкого элемента — цепи, за счёт сил зацепления. Может иметь как постоянное, так и переменное передаточное число (напр., цепной вариатор). Состоит из ведущей и ведомой звездочки и цепи. Цепь состоит из подвижных звеньев. В замкнутое кольцо для передачи непрерывного вращательного движения концы цепи соединяются с помощью специального разборного звена. Обычно число зубьев на звёздочках и число звеньев цепи стремятся делать взаимно простыми, что обеспечивает равномерность износа: каждый зуб звёздочки будет поочерёдно работать со всеми звеньями цепи. Классификация цепей[править | править вики-текст] · По назначению: · приводные цепи · тяговые цепи · грузовые цепи. 45. Подшипники качения состоят из двух колец, тел качения (различной формы) и сепаратора (некоторые типы подшипников могут быть без сепаратора), отделяющего тела качения друг от друга, удерживающего на равном расстоянии и направляющего их движение. По наружной поверхности внутреннего кольца и внутренней поверхности наружного кольца (на торцевых поверхностях колец упорных подшипников качения) выполняют желоба — дорожки качения, по которым при работе подшипника катятся тела качения. 46. Муфтами называются узлы, соединяющие одну часть вала с другой для передачи крутящего момента, защиты от толчков и ударов, включения и выключения ведомой части вала (при непрерывном вращении ведущей), компенсации температурных деформаций длинных валов, облегчения сборки сложных механизмов и т. д. Муфты применяют также в качестве управляющих элементов и различных предохранительных устройств, для предотвращения возможных поломок ведущих и ведомых элементов при внезапном застопоривании движения или резком возрастании передаваемого момента или скорости вращения. Аксиомы статики Понятие и особенности твердого тела, равновесия, силы. Содержание аксиом статики, выведенных в результате обобщений многочисленных опытов и наблюдений за равновесием и движением тел. Изучение направления реакции связи, препятствующей перемещению тела. 3. Связи и их реакции
Тела в природе бывают свободными и несвободными. Тела, свобода перемещения которых ничем не ограничена, называются свободными. Тела, ограничивающие свободу перемещения других тел, называются по отношению к ним связями.
Одним из основных положений механики является принцип освобождаемости от связей, согласно которому несвободное тело можно рассматривать как свободное, если отбросить действующие на него связи и заменить их силами – реакциями связей. 4. Система сил, линии действия которых лежат в одной плоскости и все пересекаются в одной точке, называется плоской системой сходящихся сил. Теорема Плоская система сходящихся сил в общем случае эквивалентна равнодействующей, которая равна векторной сумме этих сил; линия действия равнодействующей проходит через точку пересечения линий действия составляющих. 5.
Fx= Fcosα; Px= Pcosβ= P⋅ cos90o=0; Rx=Rcosγ = -R⋅ cos(180o-γ).
6. Две параллельные силы, равные по величине и направленные в противоположные стороны, называются парой сил (фиг.30, а). Расстояние d между линиями действия сил пары называется плечом пары. Пару сил нельзя заменить и уравновесить одной силой. Уравновесить пару сил можно только другой парой. Пара сил, приложенная к твердому телу, вызывает его вращение, характеризующееся моментом пары. Моментом пары сил называется взятое со знаком (+) или (-) произведение величины одной из сил на ее плечо:m = ±Pd. Момент пары считается положительным, если пара стремится вращать тело против вращения часовой стрелки. Пару сил принято изображать изогнутой стрелкой (фиг.30, б). Буква у конца стрелки обозначает момент пары. Условие равновесия пар: для равновесия нескольких пар необходимо и достаточно, чтобы алгебраическая сумма их моментов была равна нулю. 7. Если под действием приложенной силы твердое тело может совершать вращение вокруг некоторой точки, то для того, чтобы охарактеризовать вращательный эффект силы вводится понятие – момент силы относительно точки (или центра).
Моментом силы относительно точки (рисунок 1.1) называется векторное произведение радиус-вектора точки приложения силы на вектор силы. Mo(F) = r ⊗ F 8. Плоской системой произвольно расположенных сил называется система сил, линии, действия которых лежат в одной плоскости, но не пересекаются в одной точке (рис. 1.21). Для того чтобы привести данную систему произвольно расположенных сил к произвольно выбранной точке О (см. рис. 1.21), необходимо: 1) перенести по очереди каждую силу в эту точку; 2) уравновесить силы (F1', F2’, F3’) силами. (F1'’, F2’’, F3’’) В результате приведения сил (F1, F2, F3) к точке О получили новую систему сил, состоящую из плоской системы сходящихся сил (F1,F2,F3), которые равны и параллельны данным силам, т.е. F1'= F1, F2,= F2’, F3' = F3 . (1.1)
В результате приведения получили еще одну систему пар сил
9.Существуют виды опор балок (рис. 7.2): шарнирно неподвижная опора; шарнирно подвижная опора; жесткая заделка.
ШАРНИРНО НЕПОДВИЖНАЯ ОПОРА Шарнирно неподвижная опора (рис. 7.2, а, опора А) - это закрепление конца балки, при котором балка может поворачиваться, но не может перемещатьс
|
||||||||
|
|
Последнее изменение этой страницы: 2016-04-07; просмотров: 534; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.113 (0.018 с.) |

 Эту вновь полученную систему сходящихся сил (1.1) заменяем равнодействующей силой, которая равна геометрической сумме данных сил и называется главным вектором системы:
Эту вновь полученную систему сходящихся сил (1.1) заменяем равнодействующей силой, которая равна геометрической сумме данных сил и называется главным вектором системы:


 ) и горизонтальной (
) и горизонтальной ( ).
). ). Шарнирно подвижная опора изображается посредством одного стерженька, шарнирно соединенного и с землей, и с балкой.
). Шарнирно подвижная опора изображается посредством одного стерженька, шарнирно соединенного и с землей, и с балкой. (момент жесткой заделки) и реакции
(момент жесткой заделки) и реакции  и
и  . Балка при жестком закреплении показывается заделанной в часть стены, которая штрихуется.
. Балка при жестком закреплении показывается заделанной в часть стены, которая штрихуется.




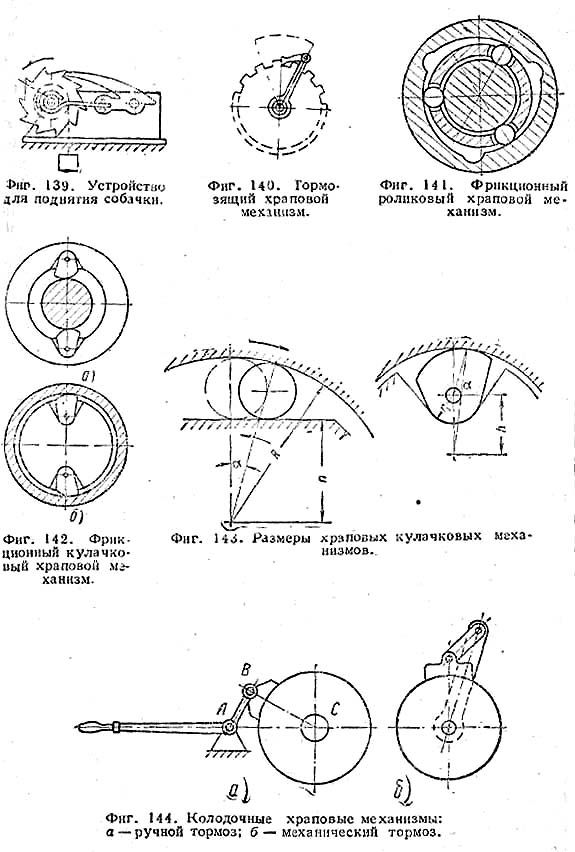 Храповой механизм можно сделать тормозящим (при вращении храпового колеса в обе стороны). Для этого колесо должно иметь симметричную, например прямоугольную, форму зуба (фиг. 140). Фрикционные храповые механизмы при больших скоростях могут обеспечить возможность сцепления связываемых звеньев при любом их относительном положении. Фрикционные храповые механизмы могут быть роликовые, кулачковые и колодочные. Роликовые (фиг. 141) применяются, например, и муфтах обгона. Кулачковые (фиг.142) применяются, например, для зажима деталей при их обработке на станках. На фиг.142, а кулачками зажимается деталь снаружи, а на фиг.142, б изнутри. При назначении размеров храповых кулачковых механизмов (фиг.143) необходимо соблюдать неравенство
α ≤ φ – 4*f*r1 / π*r,
где α - угол трения на фрикционной поверхности;
f - коэффициент трения между кулачком и осью или гнездом;
г1 - радиус оси или опорной поверхности кулачка;
г - наименьшее расстояние от центра вращения кулачка до точки касания.
Колодочные храповые механизмы устроены подобно колодочным тормозам (фиг.144). Для того чтобы механизм работал нормально, необходимо, чтобы угол АВС был тупой для торможения при вращении колеса по часовой стрелке или равным 90° при торможении в двух направлениях.
36. Винтовой механизм
Храповой механизм можно сделать тормозящим (при вращении храпового колеса в обе стороны). Для этого колесо должно иметь симметричную, например прямоугольную, форму зуба (фиг. 140). Фрикционные храповые механизмы при больших скоростях могут обеспечить возможность сцепления связываемых звеньев при любом их относительном положении. Фрикционные храповые механизмы могут быть роликовые, кулачковые и колодочные. Роликовые (фиг. 141) применяются, например, и муфтах обгона. Кулачковые (фиг.142) применяются, например, для зажима деталей при их обработке на станках. На фиг.142, а кулачками зажимается деталь снаружи, а на фиг.142, б изнутри. При назначении размеров храповых кулачковых механизмов (фиг.143) необходимо соблюдать неравенство
α ≤ φ – 4*f*r1 / π*r,
где α - угол трения на фрикционной поверхности;
f - коэффициент трения между кулачком и осью или гнездом;
г1 - радиус оси или опорной поверхности кулачка;
г - наименьшее расстояние от центра вращения кулачка до точки касания.
Колодочные храповые механизмы устроены подобно колодочным тормозам (фиг.144). Для того чтобы механизм работал нормально, необходимо, чтобы угол АВС был тупой для торможения при вращении колеса по часовой стрелке или равным 90° при торможении в двух направлениях.
36. Винтовой механизм
 Рис. 31
В перечисленныхвинтовых механизмах применяются резьбы различного профиля, чаще всего прямоугольная и трапецевидная (к примеру в слесарных тисках, домкратах и т. п.). Если угол подъема винтовой линии небольшой, то ведущим движением является вращательное. При очень большом угле подъема винтовой линии возможно преобразование поступательного движения во вращательное и тому примером может служить быстродействующая отвертка.
Рис. 31
В перечисленныхвинтовых механизмах применяются резьбы различного профиля, чаще всего прямоугольная и трапецевидная (к примеру в слесарных тисках, домкратах и т. п.). Если угол подъема винтовой линии небольшой, то ведущим движением является вращательное. При очень большом угле подъема винтовой линии возможно преобразование поступательного движения во вращательное и тому примером может служить быстродействующая отвертка.



