
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Реализация векторного управления.
Векторное управление может быть реализовано в частотно регулируемом электроприводе, как на основе АИТ с ШИМ, так и на основе АИН с ШИМ.
Одна из возможных схем управления на основе АИН с ШИМ представлена в виде структурной схемы. где БРП – блок регуляторов переменных БЗП – блок задания переменных БВП – блок вычисления переменных ДС – датчик скорости
Рассмотрим системы управления двух видов: · Сенсорная (ω измеряется) · Бессенсорная (ω вычитается) Положение переключателя на схеме соответствует бессенсорной схеме управления. На вход блока регулирования переменных подают задающий сигнал ω или М, а также потокосцепление ротора ψ2. Кроме того, на БРП подается сигнал ОС с выхода БВП, ориентированные по значениям составляющих токов статора (I1М, I1ψ), а также потокосцепления ротора (ψ2, ω). БЗП осуществляет преобразование задающих переменных (I1М* I1ψ* - преобразованные входные задающие сигналы) в систему трехфазных сигналов управления АИН с ШИМ. Смысл преобразования заключается в координатном преобразовании параметров из неподвижной системы в подвижную ортогональную систему координат. Ориентация поля ротора АД заключается в совмещении продольной оси с вектором потокосцепления ротора. При этом достигается полное совпадение между I1М c I1g и I1d c I1ψ, а также достигается соответствие углов векторов ψ2 и ψ2d. БВП вычисляет текущие значение амплитудных и фазных параметров, потокосцепления ротора ψ2, а также моментообразующей I1М и потокообразующей I1ψ тока статора, осуществляя преобразование реальных сигналов с выхода АИН с ШИМ. Надежность и стоимость системы управления, а также качество характеристик электропривода зависит от числа измеряемых параметров и от точности их измерения.
Для векторного управления АД необходимо измерять минимум два из четырех доступных для измерения переменных. 1. Токи в фазах статора (Ia, Ib, Ic) 2. Напряжения в фазах статора (Ua, Ub, Uc) 3. Угловая скорость вращения ротора (ω) 4. Положение ротора (угол отклонения ротора относительно вертикальной оси). Наиболее простым и надежным является ЭП разомкнутый по скорости, т.е. не содержащий датчика скорости – бессенсорный ЭП. В таких ЭП измеряется только ток и напряжении статора, а ω и s вычисляются в БВП. При этом в БВП задается модель которая учитывает типовые или реальноизмеренные активные и индуктивные сопротивления двигателя. Однако из-за сложности точного представления этих параметров (в частности невозможно учитывать зависимость активного сопротивления от температуры двигателя). Такие ЭП обладают невысокими регулируемыми свойствами (низкая точность при малых скоростях вращения) диапазон регулирования Д=100:1.
Значительно больший диапазон 1000:1 обеспечивают замкнутые по скорости ЭП (сенсорные), содержащие в своем составе электромеханические или цифровые датчики скорости, устанавливаемые на валу двигателя. Такие электроприводы меньшее надежны и имеют боле высокую стоимость. Векторное управление частотно регулируемым электроприводом с ШИМ требуют высокой скорости вычислений и может быть реализовано на современных мощных цифровых микропроцессорных контроллерах. Требуется большое число датчиков, способных обеспечить высокую точность измерения.
27. Автоматизированный электропривод переменного тока с непосредственным преобразованием частоты (НПЧ). Преобразователи с непосредственной связью предназначены для однозвенного преобразования энергии переменного тока одной частоты в энергию переменного тока другой (как правило, более низкой) частоты. НПЧ состоит из: 18 управляемых силовых ключей, объедененных в встречно параллельные группы с раздельным или совместным управлением. В основе непосредственного преобразователя лежит трехфазная нулевая схема выпрямления, при этом каждая фаза преобразователя состоит из двух таких встречно включенных выпрямителей состоящих из трех силовых ключей. Группа ключей имеющих общий катод - выпрямительная (положительная), а группа, имеющая общий анод - инверторная (отрицательная). Каждая фаза работает как двухкомплектный реверсивный преобразователь. Вентильные группы каждой фазы могут иметь либо раздельную, либо совместную схему управления. При раздельном управлении управляющие импульсы подаются на силовые ключи только на первые из вентильных групп в соответствии с направлением тока и напряжения в нагрузке. В период прохождения “+” полуволны управляющие импульсы подаются на силовые ключи выпрямительной группы, в период “-” на вход инверторной группы. При раздельном управлении во избежание КЗ применяют специальные логические устройства, которые исключают возможность прохождения тока в одной группе в то время когда работает другая группа. В преобразователях с совместным управлением управляющие импульсы подаются на силовые ключи обеих групп. В этом случае силовая схема предполагает включение ограничительных ректоров для уменьшения уравнительных токов между силовыми ключами катодной и анодной группы. При этом угол управления выпрямительной и инверторной групп изменяется по определенному закону, исключающему появление постоянной составляющей уравнительного тока.
Необходимо отметить, что в настоящее время, подавляющее большинство НПЧ работают по принципу раздельного управления. Преимущества раздельного управления: 1.) значительно лучшие массогабаритные показатели. 2.)Примерно в два раза меньше установленная мощность и энергопотребление.
Кривая выходного напряжения НПЧ формируется из отрезков волн напряжения питающей сети. При работе НПЧ на чисто активную нагрузку форма выходного напряжения далека от синусоидальной. Чтобы получить выходное напряжение близкое по форме к синусоидальной необходимо изменять угол управления На диаграмме показано что в течение первой полуволны угол α изменяется 0 до 90 по трапециидальному закону (0-90 перевернутая трапеция, 90-180 прямая трапеция) Рис.37
Для регулирования частоты на выходе преобразователя изменяют периоды коммутации, т.е. при уменьшении периода – выходная частота увеличится, а при увеличении периода – выходная частота уменьшится. Выходная частота НПЧ может быть только меньше частоты питающей сети т.к. выходное напряжение строится из отрезков входного напряжения. Необходимый фазовый сдвиг достигается путем сдвига на определенный угол момента подачи первого управляющего сигнала на каждой из фаз. Этот фазовый сдвиг соответствует симметрии выходного напряжения и составляет угол 1200, а изменение начальной фазы применяется для изменения чередования фаз (реверс).
НПЧ выпускают двух модификации: · С фиксированной выходной частотой. · С регулируемой выходной частотой. Если f1 = 50 Гц, то f2 регулируется в приделах от 0 до 25 Гц. Это связанно с тем, что при fвых > 50 % очень сильно искажается форма выходного напряжения. С целью расширения верхнего придела регулирования используют источники питания с частотой 100 Гц. В этом случае выходная частота регулируется в диапазоне от 0 до 180 Гц.
Достоинства НПЧ: 1. однократное преобразование энергии, боле высокий КПД ≈ 0,97-0,98 2. возможность автономного регулирования U и I. 3. свободный обмен реактивной и активной энергией между сетью и двигателем (обеспечивает возможность работы в режимах рекуперативного торможения и компенсации реактивной энергии). 4. простая реализация бесконтактного реверса. 5. коммутация силовых ключей осуществляется естественным путем.
Недостатки НПЧ: 1. ограниченная возможность регулирования частоты от 0 до 40 %. 2. относительно большое число силовых ключей (18 сравнении с 6). 3. сложность системы управления. 4. низкий cosφ (cosφ ≤0,8) Область применения НПЧ в качестве вспомогательного блока в таких электроприводах, как вентильные ЭП, ЭП двойного питания, каскадные ЭП.
|
||||||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 132; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.222.240.21 (0.009 с.) |
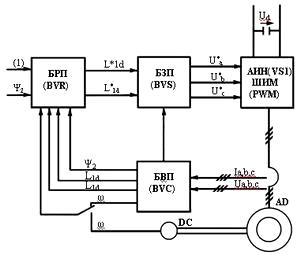 рис.35
рис.35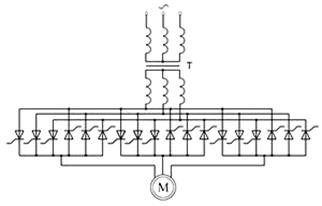 рис.36
рис.36



