
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Автоматизированные электроприводы переменного токаСодержание книги
Поиск на нашем сайте С машинами двойного питания в асинхронном режиме.
где ДЧВ – датчик частоты вращения (по скорости ротора); Фв – фазовращатель; РН – регулятор напряжения; ФНЧС – формирователь напряжения и частоты вращения; СУ – система управления. На одном валу с асинхронной машиной (МДП) установлен датчик частоты вращения, который представляет из себя тахометр с возбуждением от постоянных магнитов и числом полюсов равным числу полюсов асинхронной машины. ДЧВ одновременно служит датчиком углового положения ротора. На входе блока ФНЧС подаются сигналы: 1. с частотой питающей сети 2. подается от ДЧВ с частотой Регулирование угловой скорости МДП в этом режиме осуществляется при отсутствии воздействия регулирующего ток на
рис.54
Так же как и в асинхронном режиме в асинхронном режиме МДП может работать в двигательном режиме с ω больше и меньше синхронной, в генераторном режиме с ω больше и меньше синхронной. Д регулирования в приводах с МДП ≈ 3:1 при расширении диапазона существенным образом увеличивается установленная мощность системы. Достоинства: · Регулирование плавное; · Экономичность(за счет полезного использования энергии скольжения); · Характеристики жесткие; · Стабильность высокая (автономное регулирование U и φ ротора); · Высокий cosφ.
При двухзвенном регулировании ротор долен иметь повышенную механическую прочность. Недостатки: Дороговизна. При выборе мощности для такого электропривода необходимо учитывать также возможность регулирования реактивной мощности со стороны статора. Режим полной компенсации реактивной мощности со стороны статора требует увеличения номинального тока ротора т.е. увеличения габаритов серийно выпускаемой машины. Для двигателей мощностью 1000÷5000 МВт приведет к увеличение габаритов 2÷5 % соответственно.
Автоматизированные электроприводы переменного тока С вентильным двигателем.
АЭП с вентильным двигателем состоит из синхронного двигателя статор которого может питаться непосредственно от промышленной электросети. Кроме того питание может осуществляться через преобразовательное устройство. Ротор имеет электромагнитную систему возбуждения с постоянными магнитами. Кроме этого вентильный электропривод электронный коммутатор, который представляет из себя преобразователь частоты, реже НПЧ, чаще ПЧ с ПЗПТ. Функционально этот коммутатор подобен коллектору в машине постоянного тока. Преобразователь частоты управляется либо функцией положения ротора, либо функцией магнитного потока. Вентильный коммутатор присоединяется к выводам статорной обмотки СД и выполняет две основные функции: 1. распределение постоянного тока по цепям двигателя. 2. преобразование постоянного тока в трехфазный переменный ток с регулируемой частотой и амплитудой. Последовательность переключения тока статора и связанная с этим очередность отпирания силовых ключей определяется с помощью датчика положения ротора. Электропривод с вентильным двигателем различаются: 1. по типу ПЧ; 2. по устройству системы управления. Все они обладают следующими общими признаками: 1. возможность регулирования ω вращения, изменением амплитуды напряжения подводимого к статору (вниз). 2. возможность регулирования ω вращения, изменением IВозб (вверх). 3. возможность регулирования ω вращения, изменением частоты напряжения подводимого к статору (вверх и вниз). При этом характеристики вентильного электропривода в зависимости от режима работы коммутатора аналогичны: · регулировочные характеристики СД · регулировочные характеристики ДПТ НВ · регулировочные характеристики ДПТ ПВ
где L –фильтр для сглаживания пульсации постоянного тока; УИ – управляемый инвертор; БУИ – блок управления инвертором (сигнал углового положения ротора - измеряется косвенно напряжение и фаза с выхода инвертора); В – возбудитель, предназначенный для питания обмотки возбуждения ротора.
Работа схемы: 1. Чаще всего УИ работает с некоторым постоянным углом β определяющим фиксированную частоту инвертора, регулирование ω производится изменением напряжения, т.е. 2. Если 3. Частотное регулирование 4. В АЭП имеется возможность реализации механической характеристики двигателя последовательного возбуждения. Для этого ОВ ротора включают последовательно с УВ.
рис.56 Режим работы вентильного коммутатора и реализуемые им функции проиллюстрируем с помощью семейства регулировочных механических характеристик вентильного ЭП. 1. Замкнуты К1 и К3 2. Замкнуты К2 и К3 3. Замкнуты К2 и К3 4. Замкнуты К2 и К3 5. Замкнуты К1 и К4. Преимущество: вентильных электроприводов – большие функциональные возможности (большие моменты при малых угловых скоростях). Недостатки: 1. большое число переключений; 2. Низкое быстродействие; 3. Низкая надежность; 4. Ограниченная разрешающая способность по мощности.
|
||
|
|
Последнее изменение этой страницы: 2017-02-17; просмотров: 577; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.20 (0.008 с.) |

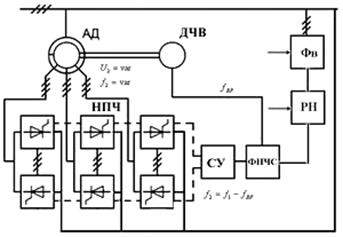 рис.53
рис.53 через блоки Фв и РН, которые соответственно изменяют начальную фазу φ2 со стороны питания ротора и его амплитуды.
через блоки Фв и РН, которые соответственно изменяют начальную фазу φ2 со стороны питания ротора и его амплитуды. . На входе блока ФНЧС формируется синусоидальное напряжение частота которого
. На входе блока ФНЧС формируется синусоидальное напряжение частота которого  т.е.
т.е.  которая в свою очередь зависит от механической нагрузки на валу двигателя.
которая в свою очередь зависит от механической нагрузки на валу двигателя. , изменение фазу с помощью ФВ и амплитуды с помощью РН. Благодаря введению обратной связи по положению ротора с помощью ДЧВ устойчивость работы электропривода будет определятся характером изменения скольжения.
, изменение фазу с помощью ФВ и амплитуды с помощью РН. Благодаря введению обратной связи по положению ротора с помощью ДЧВ устойчивость работы электропривода будет определятся характером изменения скольжения.
 рис.55
рис.55
 (“вниз”)
(“вниз”) , то регулировать можно изменением тока возбуждения
, то регулировать можно изменением тока возбуждения  (регулирование “вверх”);
(регулирование “вверх”);
 (“вверх и вниз”); Но при увеличении частоты напряжения на статор СД момент изменится, необходимо изменять ток возбуждения.
(“вверх и вниз”); Но при увеличении частоты напряжения на статор СД момент изменится, необходимо изменять ток возбуждения.
 ,
,  ;
; ,
, 


