
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Решение нелинейных уравнений. Отделение корней. Метод половинного деления. Метод хорд. Метод касательных.Содержание книги
Поиск на нашем сайте
Нелинейное ур-е (НУ) в общем виде y=f(x), f(x;y)=0, x є Нахождение корней НУ делится на 2 этапа: 1. Отделение корней 2. Уточнение корней Корень ур-я f(x;y)=0 считается отделенным на Теорема 1: если f(x) непрерывна на Теорема 2: если f(x) непрерывна и монотонна на Отсюда следует, что если на концах отрезка знаки разные, то существует хотя бы 1 корень. В том случае, если знаки одинаковы, то возникают след варианты: 1. Касание (1 корень либо их нечетное кол-во) 2. Кривая не пересекает ось, корней нет. 3. Внутри отрезка ф-я пересекает ось Х четное кол-во раз Отделение корней: 1) 2) Рассматриваются все маленькие отрезки и определяются те отрезки, на концах которых функция имеет разные знаки. В случае, если знак одинаковый, вычисляется
 , известно, что корень отделен на , известно, что корень отделен на  . Можно считать, что a,b-первые приближенные зн-я корня, a – значение с недостатком, b – с избытком. Необходимо уменьшить для решения задачи, чтобы длина не превышала . В этом случае в кач-ве корня ур-я можно взять любую точку из . . Можно считать, что a,b-первые приближенные зн-я корня, a – значение с недостатком, b – с избытком. Необходимо уменьшить для решения задачи, чтобы длина не превышала . В этом случае в кач-ве корня ур-я можно взять любую точку из .
Метод половинного деления.
f(c)=0 => с-корень, если нет, то
Метод хорд.
Шаг1. Строим стягивающую хорду между точками пересечения прямой x=a и f(x), x=b и f(x), ур-е хорды:
Чтобы найти координату с нужно: Шаг 2. Таким образом разделили отрезок на 2, выбираем из них тот, где ф-я на концах имеет разные знаки, концы обозначаем
Метод касательных. 1. определим точку пересечения х=А и f(x). Из этой точки ф-ции строим касательную, ур-е которой: 2. Ищем точку пересечения прямой х=А1 и f(x), из этой точки строим касательную к f(x) и вычисляем точку её пересечения с осью ОХ\ 3. Итерационный пр-с выполняется до тех пор, пока Для метода касательных характерно, что мы приближаемся к истинному значению корня только с одной стороны. Погрешность:
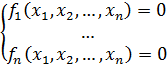
Решение систем нелинейных уравнений. Метод итерации, условие сходимости. Методы спуска. Метод покоординатного спуска. Метод градиентного спуска. Метод наискорейшего градиентного спуска. Метод Ньютона.
Первый этап: приближенные значения корней Второй этап: уточнение корней. Метод итерации:
Пускай к-либо способом мы преобразовали ур-е. начальное приближение мы подставляем в правую часть, получаем:
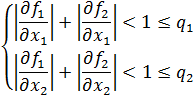
Строим итерационный пр-с, к-й сходится к решению в том случае, если все собственные числа |A|<1.
Более слабое условие: сумма модулей коэф-тов столбцов дБ меньше 1.
Этот ит пр-с заканчивается в том случае, когда разность между всеми неизвестными на (k+1)-шаге и на к-м шаге не будет превосходить заданного значения Погрешность решения можно оценить с пом формулы:
Методы спуска: Для всех этих методов характерно наличие ф-ции f такой, что при переходе от одной точки решения x0 к след x1 значение f уменьшится. Ф-я Ф-целевая ф-я и многие задачи по решению СНАУ сводятся к нахождению Ф.
Можно заметить, что при значениях переменных xi, явл корнями системы, Ф=0. Это происходит только в идеальном случае. Для приближенного решения надо найти min Ф(х) на области определения. Задача по решению СНАУ сводится к задаче поиска экстремума ф-ции. Таким образом, идея методов спуска в том, чтобы из начальной точки Метод покоординатного спуска: Из исходной СНАУ составляем Ф и дано 1. Фиксируем все переменные, кроме 2. Фиксируем все пер, кроме Аналогично поступая, находим Метод градиентного спуска: Градиент – это вектор, к-й имеет направление нормали к пов-ти уровня Ф(x)=const в сторону возрастания ф-ции. Нам задано приблизительно Метод наискорейшего градиентного спуска: На каждой итерации меняется значение шага h. Можно определить зн-е Ф слева и справа.
Для того, чтобы на каждой итерации h был max возможным, необходимо, чтобы на этой итерации значение Ф max уменьшалось. Метод Ньютона: Для этого метода х0 дб достаточно приближенным к решению.
Это разложение подставляем вместо исходной ф-ции
Если исходные нелинейные ур-я были относительно Системе в матричном виде относительно вектора Получаем вектор перехода к нелин системе.
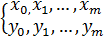
За решение исх системы берем Понятие интерполяции. Виды интерполяции. Конечные и разделенные разности. Их свойства и применение. Интерполяция параболическими полиномами по методу Ньютона и методу Лагранжа. Понятие сплайн – интерполяции. Интерполяция сплайнами второго порядка. Интерполяция – это построение достаточно простой для вычисления ф-ции f(x), совпадающей в узлах со значениями исходной ф-ции f(x), а в остальных точках отрезка [a,b] приближенно представляющая функцию с заданной точностью. Различают в зависимости от решаемых задач несколько классов интерполяции ф-ции. Дана f(x): Нужно построить 1) Параболическая интерполяция
В основе применения лежит теорема Вейерштрасса: если f(x) непрерывна на [a,b],то для любого сколь угодно малого 𝛆 существует полином В данном случае задача сводится к поиску полинома наименьшей степени k и требуемой точности совпадения. Самый простой путь поиска коэффициентов:
2) Интерполяция тригонометрическими полиномами
m-порядок полинома. 3) Интерполяция показательными полиномами
Для поиска степени искомого полинома используем конечные разности. Ф-я f(x) задана таблично, узлы - равноотстающие конечные разности 1-го порядка.
…
Конечных разностей первого порядка на 1 меньше кол-ва узлов. Конечные разности 2-го порядка:
Конечные разности k-го порядка:
Свойства конечных разностей: 1. Конечные разности константы=0 2. 3. 4. При h Разделенные разности. В том случае, когда шаг переменный, используем разделенные разности.
k-й порядок: Свойства разделенных разностей эквивалентны свойствам конечных разностей
Степень интерполяционного полинома в случае не равно отстоящих узлов выбираются таким образом, чтобы она совпадала с порядком разделенных разностей. ИП Лагранжа Пускай дана таблично заданная ф-я f(x), и мы установили, что искомый многочлен дБ степени k. Для построения полинома строится полином след.вида:
1. Степень i-го полинома влияния=k 2. I-й полином влияния в i-м узле=1. 3. I-й полином влияния во всех остальных узлах=0 В точке λ, которая не совпадает ни с одним узлом, погрешность равна: Теорема: существует единственный полином в степени k, проходящий через (k+1) точку плоскости, удовлетворяющий начальным условиям. Погрешность можно оценить следующим образом:
К достоинствам полинома Лагранжа можно отнести тот факт, что коэф-ты полинома зависят только от узлов интерполяции, но в том случае, если добавлен хотя бы 1 узел, то придется пересчитывать все полиномы. Полином Ньютона. F(x): Строится с помощью разделенных разностей.
Свойства: 1. Степень 2. В узлах полином совпадает с исходной ф-ей Положительные стороны: 1. Не требуется вычислять степень полинома. Можно взять 2-ю степень, построить, проверить погрешность, если не удовлетворяет, то повышаем степень до необх точности. 2. При добавлении новой k+1 точки, все найденные ранее коэф-ты сохраняются, а к полиному добавляется:
Сплайн-интерполяция. f(x) задана на Сплайн порядка n – функция, определенная на Пусть ф-я Sn на Параболическая сплайн-интерполяция Пусь f(x) задана таблично, S2(x)=S2i(x)= На каждом Для построения такого сплайна необходимо найти 3n коэф-та, все они находятся из след условий: 1. Совпадение сплайна на каждом отрезке с заданной ф-ей
2. Непрерывность первой производной в узлах. Равенство производных соседних полиномов в узле – условие для внутренних узлов. 3. Мы можем задать значение 1-й производной в x0 либо в xn. Этих условий достаточно, для определение единственного сплайна S2 на отрезке. Погрешность оценивается след образом:
|
||||||||||
|
|
Последнее изменение этой страницы: 2017-02-06; просмотров: 301; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.223.159.143 (0.011 с.) |

 . Такая же разность вычисляется для след уч-ка. Если для этих двух разностей выполняется:
. Такая же разность вычисляется для след уч-ка. Если для этих двух разностей выполняется:  , то мы предполагаем, что на уч-ке
, то мы предполагаем, что на уч-ке  существует корень типа касание. В этом случае мы проверяем величину значения ф-ции
существует корень типа касание. В этом случае мы проверяем величину значения ф-ции  . Если оно мало, т.е.
. Если оно мало, т.е.  , то в этом случае мы считаем, что
, то в этом случае мы считаем, что  - корень ур-я.
- корень ур-я.

 ,
,  , из них берем тот, на кот-м f(a)*f(c)<0 или f(c)*f(b)<0. Обозначим новый отрезок как
, из них берем тот, на кот-м f(a)*f(c)<0 или f(c)*f(b)<0. Обозначим новый отрезок как  , находим с1 – середину и т.д. Таким образом строится итерационный пр-с, к-й заканчивается в том случае, когда
, находим с1 – середину и т.д. Таким образом строится итерационный пр-с, к-й заканчивается в том случае, когда  , тогда за корень ур-я
, тогда за корень ур-я , погрешность данного метода не превышает
, погрешность данного метода не превышает  ,
,  <
< 

 - эта прямая пересекает ось х в т.с
- эта прямая пересекает ось х в т.с
 , строим итерационный процесс, к-й продолжается до тех пор, пока не будет выполнено след условие:
, строим итерационный процесс, к-й продолжается до тех пор, пока не будет выполнено след условие:  , x=cn. Погрешность метода:
, x=cn. Погрешность метода:

 . Отсюда можно найти точку пересечения касательной с осью Х – т. А1.
. Отсюда можно найти точку пересечения касательной с осью Х – т. А1. , x=
, x=  .
.
 F(
F( )=0
)=0 => >
=> > 

 начальные значения корня (
начальные значения корня ( =>
=>  =>
=> 

 , M=max(
, M=max( )
)

 перейти в
перейти в  таким образом, чтобы зн-я Ф уменьшилось. Этот итерационный пр-с можно повторять, но на каждом шаге зн-е Ф д уменьшаться. Этот ит пр-с заканчивается, когда
таким образом, чтобы зн-я Ф уменьшилось. Этот итерационный пр-с можно повторять, но на каждом шаге зн-е Ф д уменьшаться. Этот ит пр-с заканчивается, когда  . За решение можно взять вектор
. За решение можно взять вектор  .
.
 , и находим min Ф на ООФ по переменной
, и находим min Ф на ООФ по переменной  : Ф
: Ф  . Значение Ф(
. Значение Ф( уменьшилось, тк искали min Ф по координате
уменьшилось, тк искали min Ф по координате  , находим min
, находим min  , так делаем n шагов. Перейдем от
, так делаем n шагов. Перейдем от  к
к  и значение Ф в
и значение Ф в  . Ф(
. Ф( )
)  Ф(
Ф( , делаем так, пока
, делаем так, пока 
 , выбираем шаг h>0. Строим ит пр-с:
, выбираем шаг h>0. Строим ит пр-с:  ). Поскольку стоит минус, то будем переходить в сторону убывания ф-ции, на каждом шаге зна-е Ф уменьшается. Так до тех пор, пока
). Поскольку стоит минус, то будем переходить в сторону убывания ф-ции, на каждом шаге зна-е Ф уменьшается. Так до тех пор, пока 
 ))
)) )).На каждой итерации получается свое значение шага.
)).На каждой итерации получается свое значение шага.

 , то преобразованную систему мы получили относительно
, то преобразованную систему мы получили относительно  .
. :
:  - линейная система.
- линейная система.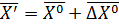 - начальная точка для следующей итерации.
- начальная точка для следующей итерации.


 , такой что для любого х
, такой что для любого х  [a,b]:
[a,b]: 
 ищем в виде полинома. Для каждой заданной точки составляем равенство искомого полинома и значения ф-ции в узле. Получаем СЛАУ, при этом степень полинома должна соответствовать кол-ву уравнений +1.
ищем в виде полинома. Для каждой заданной точки составляем равенство искомого полинома и значения ф-ции в узле. Получаем СЛАУ, при этом степень полинома должна соответствовать кол-ву уравнений +1.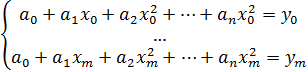


 - постоянная времени
- постоянная времени - придаточный коэф-т
- придаточный коэф-т








 конечные разности первого порядка соответствуют
конечные разности первого порядка соответствуют  ,
,  =
=  и т.д.
и т.д.
 ,
,  - первый порядок
- первый порядок

 , где
, где  - многочлен Лагранжа
- многочлен Лагранжа . Если искомая ф-я f(x)-полином, тогда погрешность=0.
. Если искомая ф-я f(x)-полином, тогда погрешность=0.



 таблично, весь отрезок разбит точками
таблично, весь отрезок разбит точками  .
. задана полиномом Sni=
задана полиномом Sni= 
 имеет k непрерывных
имеет k непрерывных  , тогда d=n-k – дефект сплайна.
, тогда d=n-k – дефект сплайна.



 , h=max
, h=max 



