Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Выполнение расчетно-графической работыСодержание книги
Поиск на нашем сайте
Электромагнитный коэффициент
Далее находим коэффициент двигателя Подставив данные варианта, найдем индуктивность якоря
Электромагнитная постоянная времени двигателя
Электромеханическая постоянная времени двигателя
Далее найдем T1 и T2:
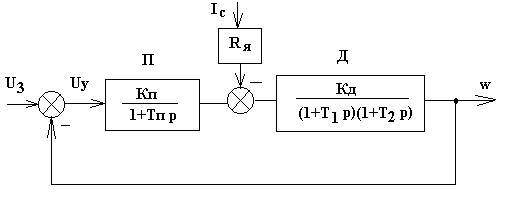
Передаточная функция двигателя будет равна:
Далее нам нужно найти передаточную функцию преобразователя:
где Тп=0.01с.
Для этого необходимо найти коэффициент передачи преобразователя где Требуемый коэффициент усиления системы:
 где где
Тогда

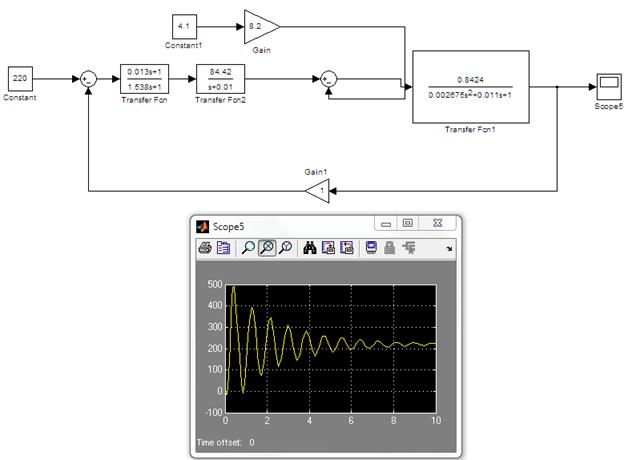
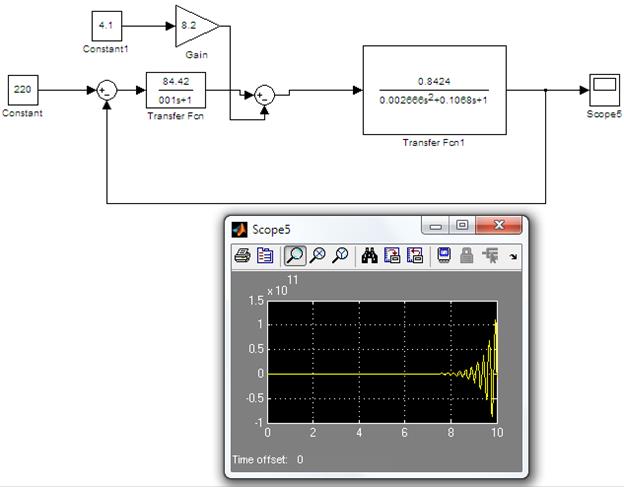
Рисунок 2. Структурная схема САР скорости двигателем Найдем коэффициент передачи преобразователя:
Подставив полученные значения, найдем передаточную функцию преобразователя:
Передаточные функции: -разомкнутой САР
-замкнутой САР по управляющему воздействию
На основании передаточной функции разомкнутой САР (система третьего порядка) проверить систему на устойчивость по критерию Гурвица и записать выражение для амплитудно- и фазо-частотных характеристик.
вычисляем начальную точку АЧХ: частоты сопряжения:
Проверка системы на устойчивость по критерию Гурвица
Вывод: так как
В результате нужно построить ЛАЧХ и ЛФЧХ системы. По полученным характеристикам производить анализ устойчивости. и предложить вариант корректировки для получения устойчивой системы. Для того, чтобы произвести коррекцию следует построить ЛАЧХ желаемой системы исходя из заданных условий, необходимых для корректированной САР.
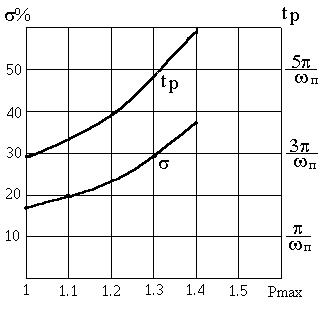
1. По графикам Солодовникова В.В.(Рисунок 5) определяем частоту среза wС. Выбираем перерегулирование s1, при котором выполнялось условие: где: максимальное значение переходной характеристики РМАХ выбираем из графика по значению s1 РМIN=1-РМАХ;
По графику определим
2. Зная РМАХ, по кривой tр находим значение 3. Частота
среза выбираются из условия 
Рисунок 3. Графики Солодовникова В.В
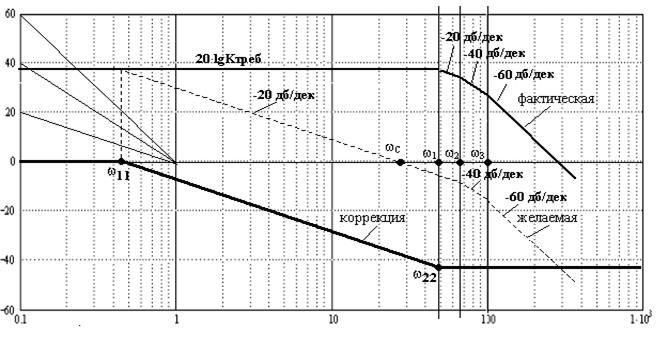
Для примера построения фактической, желаемой ЛАЧХ и ЛАЧХ корректирующего устройства использовать рисунок 3.
По ЛАЧХ корректирующего устройства (КУ) находим частоту w11 и w22. Рассчитываем постоянные времени КУ:
Передаточная функция КУ примет вид:
Рисунок 4. Структурная схема с учетом последовательного КУ.
Заключение В данной расчетно-графической работе были решены три задачи, в частности, определена передаточная функция преобразователя, двигателя, тахогенератора и составлена структурная схема САР скорости двигателем, определена устойчивость САР по критерию Гурвица, построены ЛАЧХ и ЛФЧХ, получена желаемая ЛАЧХ и определена передаточная функция корректирующего устройства, а также получен переходной процесс скорости скорректированной системы на ЭВМ.
Список литературы 1. Бесекерский В. А., Попов Е. П. Теория систем автоматического регулирования, издание третье, исправленное. Москва, издательство «Наука», Главная редакция физико-математической литературы, 1995 2. Зайцев Г. Ф. Теория автоматического управления и регулирования.— 2-е изд., перераб. и доп. Киев, Издательство Выща школа Головное издательство, 2004 3. Ким Д. П. Теория автоматического управления. Т. 1. Линейные системы. - М.: ФИЗМАТЛИТ, 2003. - 288 с. - ISBN 5-9221-0379-2. 4. Ким Д. П. Теория автоматического управления. Т. 2. Многомерные, нелинейные, оптимальные и адаптивные системы: Учеб. пособие. - М.: ФИЗМАТЛИТ, 2004. – 64 с. - ISBN 5-9221-0534-5. 5. Сборник задач по теории автоматического регулирования и управления/ Под редакцией В. А. Бесекерского. - M.: Наука, 2003. 6. MATLAB для студента, Половко А.М., Бутусов П.Н., 2005.
|
|||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2017-01-25; просмотров: 147; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.58.61.176 (0.005 с.) |

 , В*с/рад
, В*с/рад В·с/рад;
В·с/рад;
 :
: Гн
Гн :
: с
с :
: с
с с
с с
с
 – коэффициент передачи тахогенератора.
– коэффициент передачи тахогенератора.









 Гц
Гц







 , то система устойчива
, то система устойчива ,
,
 1.3
1.3
 , откуда при заданном tр можно рассчитать частоту положительности:
, откуда при заданном tр можно рассчитать частоту положительности:  .
.
 ,
, 
 ;
;