
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Подсистемы управления механизацией крылаСодержание книги Поиск на нашем сайте ПОДСИСТЕМЫ УПРАВЛЕНИЯ МЕХАНИЗАЦИЕЙ КРЫЛА
К системе управления механизацией крыла относятся подсистемы управления закрылками, предкрылками, гасителями подъёмной силы и тормозными щитками.
Подсистемы управления предкрылками и закрылками
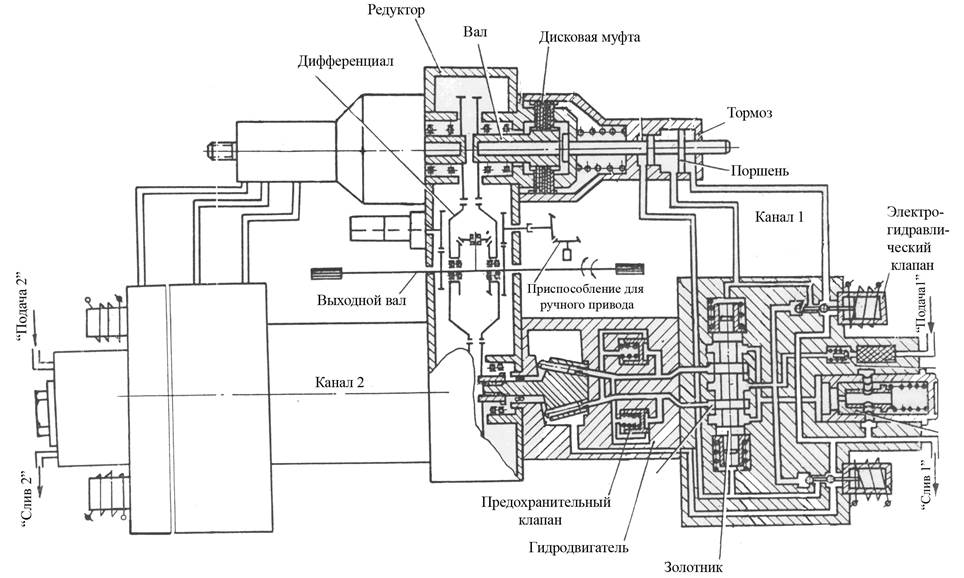
Предкрылки и закрылки устанавливаются для увеличения подъёмной силы и критического угла атаки крыла при взлёте и посадке. Для перемещения предкрылков и закрылков так же как и в большинстве случаев для управления стабилизатором необходимо вращать пару винт-гайка приводами вращательного действия, обеспечивающими полную синхронность перемещения секционных поверхностей. Время выпуска закрылков должно быть не менее 8-12 секунд, а уборки до 20 секунд, поэтому в приводах ставятся ограничители расхода. Ограничение необходимо для предотвращения поломки механизации под действием аэродинамических сил и для обеспечения условий устойчивости и управляемости самолёта. На самолёте Як-42 предкрылки и закрылки приводятся в движение с помощью привода, изображённого на рис.62 (РП-71,см. учеб. пособие, ч. 2). Этот же привод используется для управления предкрылками самолёта Ил-86. В системах этих самолётов установлено по одному двухканальному приводу. Закрылки и предкрылки самолёта Ил-76 и закрылки самолёта Ту-154 управляются приводом, изображенным на рис.66 (РП-60). Этот привод аналогичен приводу, рассмотренному ранее (рис.62), но в нём нет клапана включения 8 и его электрогидравлического шарикового клапана 7. В гидравлическом двигателе этого привода 1 в отличие от предыдущего привода плунжеры перемещаются под углом к оси вращения. Здесь другой тормоз 2, имеющий два гидравлических цилиндра. В них поступает жидкость под давлением из полостей торцов золотника, т.е. как только срабатывает один из электрогидравлических шариковых клапанов и жидкость поступает в одну из полостей торцов золотника, поршень перемещается и отжимает подвижные диски от неподвижных, в результате чего редуктор получает возможность вращаться. В этом приводе (рис.66) ограничитель расхода расположен в линии слива (он был рассмотрен в курсе гидравлики), а в приводе, представленном на рис.62, дроссельное отверстие, регулирующее расход, находится в линии нагнетания, а дроссель, «измеряющий расход», в линии слива. В подсистеме управления закрылками самолёта Ил-86 используется привод (РП-70), у которого двигатель и тормоз как в приводе, представленном на рис.66, а всё остальное как у привода на рис.62.
Рис. 66 Рулевой привод РП-60 ПОДСИСТЕМЫ ШАССИ
К системе шасси относятся подсистемы выпуска и уборки шасси, поворота колёс передней стойки и торможения колёс. Две последние подсистемы относятся к системам управления наземным движением самолёта.
Подсистема торможения колёс Во время движения по взлётно-посадочной полосе (ВПП) для эффективного торможения колёс основных опор тормозной момент на колесе МТ должен быть равен или быть немного меньше момента сцепления МСЦ колёс с ВПП МТ Если МСЦ> МТ качение будет происходить без скольжения, но увеличится длина пробега, а если МСЦ< МТ, то возникнет скольжение-юз, что может привести к уменьшению срока службы шин или их разрушению с потерей устойчивости движения самолёта. МТ=μТрТSТ, где μТ - коэффициент трения фрикционной пары тормоза, рТ- давление в тормозной камере колеса, SТ- площадь трения фрикционный пары тормоза. МСЦ =μСЦFКrК, где μСЦ - коэффициент сцепления колеса с ВПП, FК- радиальная нагрузка на колесо, rК -радиус колеса. Коэффициент μСЦ зависит от скорости движения самолёта, типа и состояния ВПП, поверхности шины и давления в камере колеса. FК определяется массой самолёта и его аэродинамической характеристикой при посадке. Коэффициент μТ зависит от температуры в плоскости трения и скорости скольжения фрикционной пары. В процессе торможения μСЦ, μТ и FК очень быстро меняются и для соблюдения условия МТ Разность моментов ΔМ= МТ - МСЦ создаёт угловое замедление ε, равное ε= где JК - момент инерции колеса. На самолётах гражданской авиации Ту-154, Ил-62, Ил-76 и Як-42 на угловое замедление реагируют инерционные датчики, подающие сигнал на уменьшение тормозного момента. Такие системы называются ε - системами. Их схема изображена на рис.81.
Рис. 81. Схема ε - системы торможения
Здесь 1- тормозной редукционный клапан, на который воздействует пилот, 2- кран растормаживания, 3-тормозная камера, 4-инерционный датчик юза. В датчиках юза имеется маховик, который при возникновении юза продолжает вращаться по инерции. На самолётах Ил -62 и Ил-76 это приводит к замыканию контактов концевого выключателя, подающего сигнал на электрогидравлический кран, соединяющий тормозную камеру со сливом. А на самолёте Ту-154 и Як-42 инерционный датчик и клапан растормаживания объединены в одном корпусе. В нём перемещение маховика приводит к перемещению рычагов, в результате чего перекрывается клапан, соединяющий тормозную камеру с линией высокого давления, и открывается клапан, соединяющий камеру со сливом. В тормозном колесе к тормозной камере подсоединены поршни. При подаче в камеру давления они перемещаются, преодолевая усилие возвратных пружин, и прижимают вращающиеся диски к неподвижным. Сброс давления из камеры приводит к возвращению в исходное положение и растормаживанию. ε - система недостаточно эффективна, имеет постоянную настройку датчиков, в неё трудно ввести корректирующие сигналы и она имеет малый ресурс (~1000 посадок). Эффективность ε - системы повышается применением тахогенератора - датчика оборотов (Ил-86), что даёт возможность вводить корректирующие сигналы. При этом затормаживание начинается не при возникновении юза, а при достижении минимально допустимой скорости вращения колёс. Ещё большая эффективность торможения достигается в разработанных Δω - системах, работающих по рассогласованию частот вращения нетормозного и тормозного колеса, в которых нет "угасания" инерционного датчика при подскоках и длительном движении по обледенелой полосе, что приводит к разрушению шин.
Рис. 82 Схема Δω - системы торможения
В этих системах (рис.82) кроме тормозного клапана 1, клапана растормаживания 2, тормозного колеса 3 и нетормозного колеса 4 есть на каждом колесе тахогенераторы 5 и блок 6 вычисления величины Δω=ωНТ-ωТ. Использование Δω - систем приводит к уменьшению послепосадочного пробега на 12-21%. Стремление к дальнейшему совершенствованию привело к созданию S - систем, работающих по величине относительного проскальзывания (по сигналу об относительном отставании тормозного колеса) (рис.83). В них по сигналам с тахогенераторов вычисляется коэффициент относительного проскальзывания S, дающего более точную информацию о замедлении S = Для этого, кроме того, что есть в Δω - системах, есть также блок 1, вычисляющий S (рис. 83).
Рис. 83 Схема S - системы торможения
Рис. 84 Схема самонастраивающейся системы торможения Следующим этапом развития явилось создание самонастраивающихся систем с поиском предельного значения коэффициента сцепления μСЦ - наиболее выгодных областей или режимов работы (рис.84). В этой системе по сравнению с S- системой (рис.83) имеются блок вычисления dS/dt и dμ /dS 1 и датчик 2 реализуемого значения μСЦ. Эта система сложна и трудна в исполнении, но, реагируя на dμ /dS, она увеличивает или уменьшает тормозное давление для получения максимального качества.
Рис.85 Рис.86 Схема системы торможения Схема расчёта системы торможения без тормозного клапана без тормозного клапана При затормаживании, если давление в тормозной камере равно рКi, рабочая точка А' системы (рис.86) будет определяться точкой пересечения характеристики труб 1+2(Р1-2), поднятой на величину рКi, с характеристикой насоса. Если давление в баке равно рб, то в случае растормаживания кривая потребного давления участка 2-3 будет представлена кривой Р2-3. Давление в линии слива будет определяться давлением в камере рКi. Оно пойдёт на преодоление давления в баке и потери на сопротивление сети, поэтому рабочая точка А'' при растормаживании найдётся на пересечении этой кривой с прямой рКi=const. Здесь при затормаживании и растормаживании меняется структура схемы и источник энергии. рКi определяется нагрузкой рКi=Fi/SЭФ. Т.к. в процессе работы F меняется, то зависимость F=f(t) разбивается на интервалы, в пределах которых сила считается постоянной и для каждого интервала с силой Fi производится расчёт.
Рис.87 Рис.88 Схема системы с тормозным клапаном Схема расчёта системы с тормозным клапаном Схема системы с редукционным клапаном представлена на рис.87. При затормаживании жидкость через редуктор и электрогидравлические краны пойдёт к цилиндрам. Кривая 1 потребного давления участков 2 и 3 представлена на рис.88. Она начинается из точки рКi. Соединение труб 2 и 3 разветвлённое. При равенстве давлений рКi в камерах, сложив эти две кривые, наложенные друг на друга, по горизонтали, получим суммарную кривую 2 (Σ2,3 =Σ1). Характеристика участка 1 представлена кривой 3. Сложив её по вертикали с кривой 2 (Σ1), получим суммарную кривую 4: Σ2=Σ1+1. Т.к. давление будет определяться давлением редуктора PРЕД, то рабочая точка А' найдётся на пересечении Σ2 с горизонталью РРЕД=соnst. При растормаживании давление в системе будет определяться давлением в редукторе минус падение давления на участке 1-2 (1-3) при расходе QЗАТОРМ. Вычтя эти потери из РРЕД и проводя горизонталь Р РЕД -ΔР1, получим рабочую точку А"- точку пересечения горизонтали с кривой 5 - характеристикой трубопровода, по которому жидкость двигается из цилиндра в бак без учёта давления в баке.
Рис.89 Схема подсистемы торможения
На рис.89 изображена схема тормозной подсистемы. Аналогично строятся подсистемы самолётов Ту-154 и Як-42. Здесь 1 - редукционные тормозные клапаны, на которые воздействует пилот через педали (вся перечисляемая элементная база ранее была рассмотрена в курсе гидравлики). Давление на выходе из него пропорционально обжатию клапана. После редукционного клапана жидкость направляется в блокировочный клапан 2, проходные сечения которого открываются после обжатия амортизационной стойки для предотвращения посадки с заторможенными колёсами. Далее находится сдвоенный модулятор 3, в котором имеются челночный клапан для подключения основного и аварийного питания и дроссели для обеспечения плавности затормаживания. За модулятором находится антиюзовый автомат 4. В нём через шестерни вместе с колесом вращается маховик. При затормаживании колеса в момент, предшествующий юзу, маховик с втулкой внутри него продолжает вращаться. Втулка имеет винтовую поверхность 1(рис.90), на которую упираются перья 2 толкателя 3, находящегося внутри втулки. Когда маховик начинает вращаться вместе с втулкой, перья не вращающегося с ними толкателя скользят по винтовой поверхности втулки и выдвигают толкатель из втулки, а он нажимает на рычаг, который, в свою очередь, перемещает другой рычаг. Это приводит к закрытию клапана, подающего высокое давление в тормозную камеру 5 (рис.89), и открытию клапана, соединяющего камеру со сливом, в результате чего происходит растормаживание.
Рис.90 Схема работы толкателя антиюзового автомата
Аварийным источником питания на рис.89 является аккумулятор 6. Жидкость из него подаётся в подсистему через аварийные тормозные редукционные клапаны 7, управляемые вручную от рукояток. Далее жидкость проходит через дозатор 8, необходимый для перекрытия трубопровода в случае его обрыва. После него рабочее тело поступает к челночному клапану сдвоенного модулятора 3 и затем двигается уже описанным путём. Вторые клапаны 1 и 7 подают жидкость в тормозные камеры колёс другой опоры. В этой подсистеме, как и в подсистеме выпуска-уборки шасси, также нет электрических элементов в силу их недостаточной надёжности. Подсистемы торможения самолётов Ил-62 и Ил-76 подобны. Здесь управляющим воздействием является электрическое напряжение, поступающее с потенциометров управления, установленных под педалями, при перемещении которых двигается катушка относительно контактов.
Рис.91. Упрощённая схема подсистемы торможения колёс самолётов Ил-62 и Ил-76
Напряжение направляется в электрический блок, а из него в электрогидравлический клапан 1 (рис.91). На рис. 91 весьма упрощённо представлена эта тормозная система. В электрогидравлическом кране торможения (рис.92) при ходе катушки потенциометра управления, равном 3 мм, выталкивается шарик клапана 1 и полость А разобщается со сливом. Дальнейшее перемещение катушки под педалью приведёт к подаче напряжения в клапан 2. Его соленоид выталкивается, отжимая вниз золотник 3, в результате чего жидкость под давлением через золотник поступает в полость А, сжимается редукционная пружина 4, клапан 5 открывается и жидкость далее двигается по системе торможения через демпфер 2 (рис.91), антиюзовый автомат 3 и челночный клапан 4 в тормозную камеру колеса. При возникновении юза антиюзовый автомат 3 подаёт электрический сигнал на клапан 6 (рис.92) электрогидравлического редукционного клапана. Его соленоид, выталкиваясь, перемещает золотник 3 вверх, соединяя полость А со сливом, что приводит к растормаживанию. Клапаном включения - отключения 5 (рис.91) в этой подсистеме является трёхходовой двухпозиционный кран. На стоянке самолёта он перемещается в другое положение и жидкость под давлением от аккумулятора 6 через редукционный клапан 7, понижающий давление до 5 МПа, перемещает челнок в челночном клапане 4 и поступает в тормозную камеру.
Рис. 92. Электрогидравлический кран торможения
Так осуществляется стояночное торможение, которое также используется для затормаживания колёс основных опор при уборке. Предотвращение посадки с заторможенными колёсами осуществляется электрическим путём с помощью концевых выключателей, блокирующих подачу сигнала на клапан включения. На самолёте Ил-62 в качестве аварийной системы используется гидроазотная система. Электродистанционное управление подсистемы позволило расположить её вне герметичной части самолёта, что увеличило безопасность при разгерметизации системы. Следующим этапом развития тормозных подсистем является подсистема самолёта Ил-86 (рис.93), имеющая три подсистемы, питающиеся от своих блоков. В каждой подсистеме есть по два задатчика давления 1 (рис.93 и рис.94), блока управления 2, агрегата управления 3 и одна система стояночного торможения. Задатчик давления находится под педалями. Их обжатие сначала приводит к замыканию контактов микровыключателя 4 (рис.94), подающего сигнал в блок управления 2, а из него в клапан 5 агрегата управления. Соленоид клапана выталкивается, и шариковый клапан перекрывает отверстие, через которое подавалось высокое давление на левый торец золотника 6. До этого момента оно, действуя на левый торец золотника бóльшего диаметра, держало золотник в крайнем правом положении и высокое давление было перекрыто буртиком золотника. При выталкивании соленоида на этот левый торец начинает действовать сливное давление, тогда как на правый по-прежнему действует высокое. Поэтому золотник 6 перемещается влево и жидкость под давлением получает возможность через дроссели 7 двигаться к соплам 8.
Схема подсистемы торможения колёс самолёта Ил-86
Дальнейшее перемещение педалей, сдвигая конус, заставляет двигаться сердечник индукционного задатчика давления 9. Это вызывает изменение его индуктивности. Сигнал с задатчика передаётся в блок 2, а из него на электромеханический преобразователь 10, в результате чего заслонка 11 перемещается влево, изменяются давления на торцах золотника 12 и он сдвигается вправо, давая возможность жидкости из магистрали высокого давления, перемещая челночный клапан 13, через дозатор 14 поступить в тормозную камеру. Уменьшение обжатия педалей приводит к перемещению заслонки вправо и сбросу давления из тормозной камеры. Это также имеет место, если перед началом юза частота вращения колеса начинает уменьшаться, что приводит к уменьшению частоты переменного тока, вырабатываемого тахогенератором 15, находящимся в колесе. Получив эту информацию, блок 2 определяет скорость замедления и, если она превышает допустимую величину, выдаёт сигнал электромеханическому преобразователю на растормаживание.
Схема подсистемы торможения колёс самолёта Ил-86 В состав агрегата управления входит индукционный датчик обратной связи 16. Давление, поступающее в тормоза, давит на мембрану датчика. Это приводит к изменению зазора и его индуктивности. Сигнал с датчика обратной связи поступает в блок 2, где он сравнивается с сигналом с задатчика 9. При их равенстве заслонка 11 устанавливается в нейтральное положение, а жидкость с заданным ранее давлением запирается в камере. Так достигается пропорциональность давления и эффективности торможения степени обжатия педалей. На стоянке включением выключателя 17 электрогидравлический кран стояночного торможения 18 перемещается в другое положение, чем это было при основном торможении, что приводит к движению жидкости из аккумулятора 19 через кран, редуктор стояночного торможения 20, снижающий давление до 10 МПа, челночный клапан 13 и дозатор 14 к тормозам. При отказе одной из трёх подсистем торможения эффективность торможения снижается на одну треть. Кроме основного и стояночного торможения колес основных стоек существует также подтормаживание при уборке шасси. На самолётах Ил-76, Ил-86 и Як-42 при уборке подтормаживаются и колеса передней опоры с помощью блока цилиндров, в которые поступает жидкость из линии уборки передней стойки.
Вопросы для самопроверки 1. Какое соотношение тормозного момента и момента сцепления должно быть при торможении колёс основной опоры и что происходит при отклонении от этого соотношения? 2. Что представляет собой ε -система торможения и из каких элементов она состоит? 3. Какие недостатки имеет ε - система торможения и какой существует способ повышения её эффективности? 4. В чём заключается преимущество ω - системы торможения и из каких элементов она состоит? 5. В чём заключаются особенности расчёта тормозной системы с редукционным клапаном и без него? 6. Из каких элементов состоит и как работает подсистема торможения самолётов Ту-154 и Як-42? 7. Как работает инерционный датчик юза? 8. В чём заключается особенность системы торможения самолётов Ил-62 и Ил-76? Подсистема хвостовой опоры
Хвостовая опора необходима для предотвращения опрокидывания самолёта на хвост во время загрузки и разгрузки через грузовой люк. Подсистема управления хвостовой опоры самолёта Ил-76 состоит из подсистемы выпуска и уборки и подсистемы изменения её длины. Обе подсистемы имеют клапаны управления. В подсистему выпуска и уборки кроме этого входят цилиндры-выключатели замка убранного положения и цилиндр выпуска и уборки хвостовой опоры. В подсистеме изменения её длины имеются цилиндр-стойка хвостовой опоры, вентиль, регулирующий расход, поступающий в цилиндр-стойку, и предохранительный клапан.
Вопросы для самопроверки 1. Из каких элементов состоит подсистема управления дверями, трапом и хвостовой опорой? 2. Как работает подсистема управления грузовым люком самолёта Ил-76? Как обеспечивается порядок срабатывания её элементов?
ЛИТЕРАТУРА 1. Матвеенко А.М., Зверев И.И. Проектирование гидравлических систем летательных аппаратов. - М.: Машиностроение, 1982. 2. Системы оборудования летательных аппаратов. /Под ред. Матвеенко А.М. и Бекасова В.И. - М.: Машиностроение, 1986. 3. Аэродромные системы торможения самолётов. /Под ред. А.М. Матвеенко. - М.: Машиностроение. 1984. 4. Авиационные правила, часть 25 (Нормы лётной годности самолётов транспортной категории). Межгосударственный авиационный комитет, 1994. 5. Гониодский В.И., Склянский Ф.И., Шумилов И.С. Привод рулевых поверхностей самолётов. - М.: Машиностроение, 1974. 6. Гамынин Н.С. Гидравлический привод систем управления. - М.: Машиностроение, 1972. 7. Ружан В.М., Клёмина Л.Г. Гидравлика самолётных систем. – М.: МГТУ ГА, 1996. 8. Ружан В.М. Элементная база жидкостно-газовых систем воздушных судов. – М.: МГТУ ГА, 1996. 9. Клёмина Л.Г. Элементная база жидкостно-газовых систем воздушных судов. – М.: МИИГА, 1991. 10. Пронь И.К., Юркевич Н.Р. Конструкция и лётная эксплуатация самолёта Як-40. - М.: Машиностроение, 1979. 11. Руководство по технической эксплуатации самолёта Як-42. 12. Пассажирский самолёт Ил-62. /Под ред. Новожилова Г.В. - М.: Машиностроение, 1981. 13. Пишков Н.Н. Самолёт Ил-62. - М.: Машиностроение, 1976. 14. Самолёт Ту-154, ч. 1, 2. - М.: Машиностроение, 1975. 15. Шмаков Ю.И., Семёнов В.Н. Конструкция и лётная эксплуатация самолёта Ил-76Т. - М.: Машиностроение, 1981. 16. Руководство по технической эксплуатации самолёта Ил-76. 17.Руководство по технической эксплуатации самолёта Ил-86. 18. Яковлев Ю.Я. Самолёт Ил-86. - М.: Воздушный транспорт, 1992. 19. Руководство по технической эксплуатации самолёта Ил-96. 20. Руководство по технической эксплуатации самолёта Ту-204. 21. Aircraft maintenance manual А-310. 22. Course notes manual of A-310-300, Airbus industries. 23. Пассажирский самолёт А-310. - М.: ЦАГИ, 1990. 24. Aircraft maintenance manual А-320. 25. Пассажирский самолёт А-320. - М.: ЦАГИ, 1993. 26. Удалов К.Г., Комиссаров Д.С. Boeing 737. - Самара, 1994. 27. Boeing 737. Training manual. 28. Удалов К.Г., Комиссаров Д.С. Boeing 747. - М.: Авико- пресс, 1994. 29. Boeing 747. Training manual. 30. Удалов К.Г., Комиссаров Д.С. Boeing 757. – М.: Авико-пресс, 1994. 31. Boeing 757. Maintenance Training. 32. Удалов К.Г., Комиссаров Д.С. Boeing 767. - М.: Авико-пресс, 1994. 33. Пассажирский самолёт Boeing 767. - М.: ЦАГИ, 1987. 34. Boeing 767. Maintenance Training. 35. Boeing 777. Training manual. 36. DC-10. Maintenance manual.
СОДЕРЖАНИЕ Подсистемы управления механизацией крыла…………………………………….3 §1. Подсистемы управления предкрылками и закрылками…………………...3 §2. Подсистема управления гасителями подъёмной силы……………………5 §3. Подсистема управления тормозными щитками…………………………...8 Подсистемы шасси…………………………………………………………………..9 §1. Подсистема выпуска и уборки шасси………………………………………9 §2. Подсистема поворота колёс передней опоры………………………….....14 §3. Подсистема торможения колёс…………………………………………....20 Функциональные подсистемы управления дверями, трапом, грузовым люком и хвостовой опорой………………………………………………………...31 §1. Подсистема управления дверями………………………………………….31 §2. Подсистема управления трапом…………………………………………...32 §3. Подсистема открытия и закрытия грузового люка…………………..…..32 §4. Подсистема хвостовой опоры……………………………………...……...35 Подсистема управления стеклоочистителями……………………………………35 Гидросистемы самолётов гражданской авиации…………………………………39 А. Гидросистемы отечественных самолетов……………………………....…39 Б. Гидросистемы зарубежных самолетов…………………………………..…43 Приложение…………………………………………………………………………47 ПОДСИСТЕМЫ УПРАВЛЕНИЯ МЕХАНИЗАЦИЕЙ КРЫЛА
К системе управления механизацией крыла относятся подсистемы управления закрылками, предкрылками, гасителями подъёмной силы и тормозными щитками.
|
||||
|
|
Последнее изменение этой страницы: 2016-12-27; просмотров: 784; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.89 (0.014 с.) |

 ≤ МСЦ.
≤ МСЦ. =
=  =
=  ;
;

 .
.






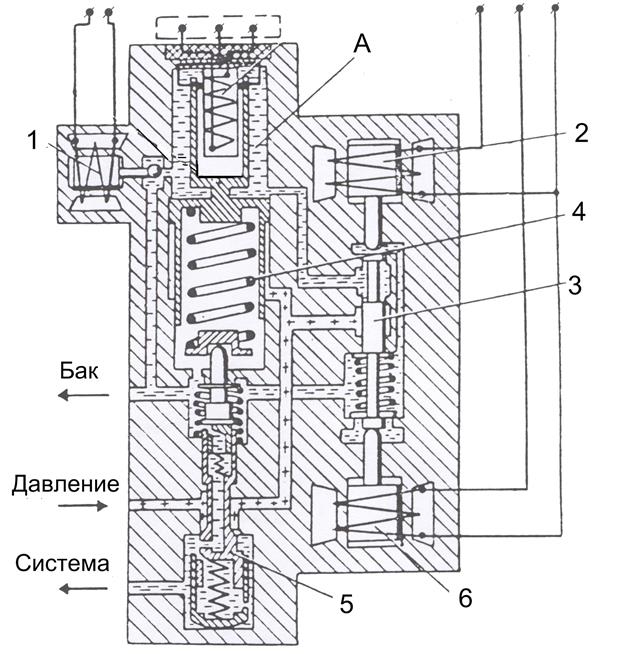
 Рис.93
Рис.93 Рис.94
Рис.94


