Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Измерительные мосты постоянного токаСодержание книги
Поиск на нашем сайте
Одинарные мосты постоянного тока, как правило, имеют классическую МИЦ (см. рис. 10.10), у которой Zl=Rx, Z2 = R2, Z3=R3, и Z4=R4. Таким образом, область применения их ограничивается измерением Rx, и они дополняют рассмотренные в § 10.2.1 омметры, являясь по сравнению с ними хотя и более сложными, но значительно более точными приборами. Условие равновесия (10.5) преобразуется для мостов постоянного тока в более простое RхRз=R2R4, Откуда Rх= R2 R4/Rз. (10.9) Из (10.9) следуют два способа уравновешивания практиченских схем мостов: изменением R2 при R4/R3= const (магазинные мосты) и R4/R3 при R2 = const (линейные мосты). Наиболее распространены магазинные мосты, так как R2 можно оформить в виде высокоточного магазина сопротивлений, а для расширения пределов измерения Rx следует изменять R4/Rз ступенями, кратными 10. У линейных мостов для плавного изменения R4/Rз необходим потенциометр специальной конструкции, который значительно хуже магазина сопротивлений по таким параметрам, как точность и надёжность. |Если магазинный мост имеет в качестве И магнитоэлектрический микроамперметр или гальванометр, то без особых трудностей можно измерять значения Rx в диапазоне 1...106 Ом. Для расширения пределов измерения Rx в сторону больших (до 1016 Ом) и малых (до 10-8 Ом) значений применяют дополнительные схемные и конструктивные решения.
а б
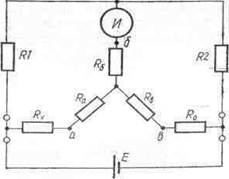
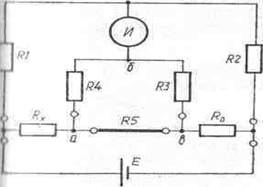
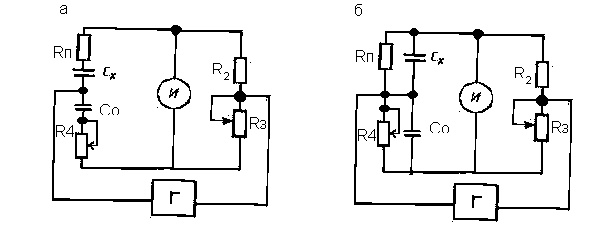
Рис. 10.12. Схема двойного моста постоянного тока: a — электрическая схема; б — эквивалентная схема При измерении больших Rx необходимо исключить влияние внешних магнитных полей путем полного экранирования моста с соединением одной из его узловых точек с экраном. Кроме того, больших Rx значительно уменьшается Sмиц (МИЦ становится существенно неравноплечей), и для компенсации этого требуется, согласно (10.8), увеличивать SИ. Поэтому широкодиапазонные мосты могут иметь два индикатора: магнитоэлектрический прибор и высокочувствительный вольтметр постоянного тока, имеющий в качестве этот же магнитоэлектрический прибор. При измерении малых Rx необходимо применять четырехзажимную схему включения Rx, что уже расширяет пределы измерения Rx до 0,1 Ом. Измерительный мост должен быть двойным, как показано на рис. 10.12, а. Он имеет рабочую цепь, составленную из источника Е, измеряемого Rx и образцового Ro резисторов, а также соединяющего их провода с сопротивлением R5. Измерительная цепь моста включает резисторы RI...R4 и индикатор И. Расчетные соотношения для двойного моста легко получаются заменой треугольника, образованного резисторами R4, R3 и R5, на эквивалентную звезду. Как видно из рис. 10.12, б, эквивалентная схема двойного моста вставляет собой одинарный мост, равновесию которого соответствует условие R1(Rв+R0)=R2(Rx+Ra), Где Ra=R4R5/(R3+R4+R5); Rв=R3R5/(R3+R4+R5). Таким образом, Rx=R0R1/R2+(R3R5/(R3+R4+R5)*(R1/R2 – R4/R3)), (10.10) и при симметричной измерительной цепи моста, когда R1/R2=R4/R3, получаем окончательно Rx=R0R1/R2. (10.11) Итак, измеряемое сопротивление Rx определяется значениями R0 и R1/R2, а для более точного выполнения (10.11) R5 в (10.10) должно быть по возможности малым. Конструктивно R5 выполняется в виде короткого отрезка медной шины. Мосты переменного тока Из всех разновидностей мостов переменного тока в практике| электрорадиоизмерений наиболее часто применяются одинарно четырехплечие мосты типов МЕП, МИП и МИЕП, а также тратнсформаторные мосты. Одинарные мосты наиболее просты, но относятся к низкочастотным СИ из-за влияния различных паразитных связей. Даже полное экранирование элементов моста позволяет расширить диапазон рабочих частот лишь до нескольких десятков килогерц. Трансформаторные мосты являются высокочастотными и удачно сочетают в себе высокие метрологические характеристик; возможностью автоматизации измерения параметров ДП. Мосты типа МЕП На рис. 10.13 приведены схемы мостов, обеспечивающие измерение Сх и tg d для последовательной (рис. 10.13, а) и параллельной (рис. 10.13, б) схем замещения реального конденсатора. Последовательная схема замещения соответствует малым потерям в, конденсаторе (малым значениям tg d х), а параллельная схема — значительным потерям. Обе они непосредственно следуют из эквивалентной схемы рис. 10.2, б, если измерения проводятся на низкой частоте, когда индуктивным сопротивлением wLп можно пренебречь. Как видно из рис. 10.13, обе схемы соответствуют правилу построения мостов,
Рис. 10.13. Схемы мостов типа МЕП иллюстрируемому рис. 10.11, а. Условие равновесия МИЦ для схемы рис. 10.13, а может быть записано, согласно (10.5), как (Rп+1/jwCx)R3=R2(R4+1/ jwC0), Откуда RпR3=R2R4; R3/Cx=R2C0 И окончательно Сx=C0R3/R2; tg d=RпwCx=wC0R4. (10.12) Из соотношений (10.12) следует, что уравновешивание МИЦ проще всего осуществлять изменением R3 и R4 при постоянной емкости С0 образцового конденсатора. При этом шкала R3 может быть проградуирована в значениях Сх, а шкала.R4 — в значениях tg dx( на данной частоте измерения). Ступенчатым изменением R2 удобно расширять пределы измерения Сх. Аналогичным образом для схемы рис. 10.13, б Сх=С0R3/R2; tg dx= 1/wC0R4, (10.13) т. е. свойства обеих схем аналогичны. Кроме того, из (10.12) и (10.13) следует, что при измерении Сх обе схемы частотно независимы. Это важное достоинство мостов типа МЕП, позволяющие применять их для измерения Сх на рабочей частоте. Мосты типа МИП При построении схем мостов для измерения Lx и Qx удобно воспользоваться правилом, иллюстрируемым рис. 10.11, в, так как в этом случае образцовой мерой по-прежнему является конденсатор.
Рис. 10.14. Схемы мостов типа МИП. Схема замещения реальной катушки индуктивности при 1/wСп >> w Lx значительно упрощается (см. рис. 10.2, в) и учитывает только активные потери. При малых QX(QX<30) схема моста соответствует рис. 10.14, а, а при QX>30 — рис. 10.14, б. Для схемы рис. 10.14, а из условия равновесия (RП+jwLx)(R3/jwC0)/(R3+1/ jwC0)=R2R4 Следует, что Lx=C0R2R4; Qx=wLx/Rп=wC0R3. (10.14) Аналогичным образом для схемы рис. 10.14,б Lx=C0R2R4; Qx=1/wC0R3, (10.15) т. е. свойства обеих схем аналогичны. Шкала R4 может быть проградуирована в значениях Lx, шкала R3 — в значениях Qx, а с помощью R2 удобно расширять пределы измерения Lx. При измерении Lx моcт типа МИП также частотно-независим. Мосты типа МИЕП Анализ схем рис. 10.13 и рис. 10.14 и полученные соотношения (10.12)...(10.15) показывают, что универсальный мост может быть синтезирован из мостов типов МЕП и МИП, а различные режимы измерения получены коммутацией плеч такого моста. Именно этот путь используется при проектировании мостов типа МИЕП, которые в практических вариантах приборов обеспечивают дополнительно измерение Rx на постоянном и переменном токах. Они имеют общие ОУ, общее плечо резисторов, с помощью которых выбирается нужный предел измерения, и один образцовый конденсатор постоянной емкости. При измерениях на переменном токе в диагональ питания включается ИГ, а для обеспечения работы на постоянном токе предусматривается специальный выпрямитель. Соответственно индикаторами равновесия являются вольтметры переменного и постоянного токов. Трансформаторные мосты Трансформаторные измерительные мосты образуются на основе МИЦ с сильной индуктивной связью между элементами. Если мы имеем две катушки с индуктивностями LI и L2, то индуктивная связь между ними, характеризуемая значением взаимной индуктивности М и коэффициентом связи kc = М/Ö L1L2, будет сильном тогда, когда kс близок к 1, т. е. M~ Ö L1L2. При такой связи плечей МИЦ трансформаторные мосты хорошо защищены от влияния внешних электромагнитных полей, а их характеристики стабильны во времени, при изменениях температуры и в очень широком частотном диапазоне (от низких частот до сотен мегагерц). Четырехплечий трансформаторный мост (рис. 10.15) содержит трансформатор напряжения Tpl. На вторичной обмотке его, состоящей двух секций с числами витков п1 и п2, формируются напряжения, создающие через измеряемый и образцовый ДП (Zx и Z0) токи Ix и I0. В трансформаторе тока Тр2 происходит сравнение IХ и I0 (компаратор токов IХ и I0). Секции п1 и п2 трансформатора Tpl включены согласно, а секции n3 и n4 трансформатора Тр2 – встречно.
Как видно из рис. 10.15, равновесие моста (Uвых=0), будет иметь место при Ixn3=I0n4. Так как Ix=Uг(n1/n)*1/Zx; I0=Uг(n2/n)*1/Z0,
|
|||||
|
|
Последнее изменение этой страницы: 2016-12-28; просмотров: 597; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.99.221 (0.007 с.) |