
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Изменение частоты системы и влияние на устойчивость асинхронной нагрузкиСодержание книги
Поиск на нашем сайте
Значения Р и Q при изменении подводимого U влияет на условия опрокидывания двигателей при Mc=сonst, а Р на валу двигателя изменяется пропорционально частоте (Р=ωМ). Снижение f приводит к уменьшению скольжения
Где При М=сonst можно грубо заменить зависимостью s=f(ω) прямой и принять s
36.Представление нагрузки в расчетах устойчивости. Статические и динамические характеристики нагрузки. Переходные процессы в узлах нагрузки могут рассматриваться с двух точек зрения: 1) поведения собственно нагрузки при переходных процессах и влияния этих процессов на работу потребителей {например, мигание ламп при колебаниях напряжения в сети, порча продукции при изменении скорости двигателей во время изменений напряжения или частоты при переходных процессах и т. п.); 2) влияния переходных процессов в нагрузке на режим системы (например, самозапуск двигателей может привести к недопустимому понижению напряжения в системе, а в неправильно спроектированной системе — даже к нарушению ее устойчивости). Кроме того, процессы, непрерывно происходящие в какой-либо нагрузке, могут оказывать неблагоприятное влияние на работу остальных потребителей системы (например, толчки в нагрузке, содержащей мощные двигатели прокатных станов, могут приводить к колебаниям напряжения и частоты в системе, понижая качество выдаваемой потребителям энергии).
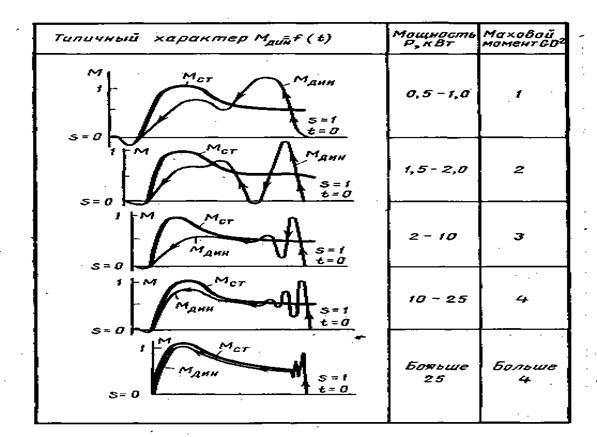
Процессы при медленных отклонениях от установившегося состояния могут всегда рассматриваться на основе только статических характеристик. Для изучения процессов при быстрых изменениях, т. е. «в динамике», должны применяться динамические характеристики. Однако в ряде случаев и при рассмотрении динамических процессов можно пользоваться квазидинамическими, а иногда и статическими характеристиками. Например, при относительно медленных ускорениях асинхронного двигателя и несоизмеримости электромагнитных и электромеха-' нических постоянных времени разница в использовании статических и динамических характеристик будет невелика (рис. 11.3). Как видно из рисунка, чем меньше коэффициент Ki и чем больше так называемая условная скорость изменения
характеристика процесса определяется следующим образом. Принимают, что динамический момент, возникающий при любом нестационарном режиме, состоит из двух составляющих: Мдщ, = Mt + Ms, где Mi — составляющая момента, определяемая переходными процессами, связанными с протеканием в обмотках двигателя переходных токов; М2 — составляющая момента, определяемая как М2 = К2М0Т. Здесь М с T==f (со) — статическая механическая характеристика, рассчитанная по известной формуле момента асинхронного двигателя:
37.Основные расчетные соотношения асинхронных двигателей. Схемы замещения и механическая характеристика АД. Представим приближенно всю нагр.экв-ным АД-м. При этом исп-ем статические хар-ки АД-лей и соот-но упрощенные уравнения. Этооправдано, во-первых, тем, что начальные отклонения, обусловливающие появления неустойчивости, предположены малыми, и, во-вторых, тем, что когда в процессе опрокидывания двнигатели приобретают значительную скорость, характер процесса (быстрее, медленнее) не имеет практического значения. В отдельных случаях необходимо переходить к полным уравнениям, т. е. динамическим характеристикам.
Характеристики Р = /(E, s) построены на рис. 11.7, г, где значение критического скольжения двигателя определяется из условия dPIds — 0. Дифференцируя и приравнивая нулю (11.1), получаем
значение Рт, отвечающее sKp: ПРАКТИЧЕСКИЙ КРИТЕРИЙ УСТОЙЧИВОСТИ КОМПЛЕКСНОЙ НАГРУЗКИ dE/dU Целесообразно вместо критерия устойчивости dP/ds = О или полученного выше (рис. 11.13) экв-го ему крит-я dQ/dE э = —оо пользоваться практ-м крит-м уст-ти нагрузки dE/dU = 0, который не треб.эквивалентирования двиг-й нагр; при этом оперируют только с ее внешними характеристиками Рн = f(U); QH = φ(U). При снижении напряжения на шинах двигателя до значения Uкр, отвечающего границе устойчивого режима, производная от эквивалентной э. д. с. Еэ по напряжению проходит через нуль. Таким образом, нарушение устойчивости связано с тремя соотношениями:
|
||||||
|
|
Последнее изменение этой страницы: 2016-09-19; просмотров: 456; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.196.150 (0.008 с.) |



 f. Однако критическое скольжение при снижении частоты оказывается больше, т.к.
f. Однако критическое скольжение при снижении частоты оказывается больше, т.к. Это благоприятно сказывается на устойчивость, тем более, что максимальное значение M несколько увеличивается. Где 1 – снижение f 2 – норм. Режим 3 – снижение U
Это благоприятно сказывается на устойчивость, тем более, что максимальное значение M несколько увеличивается. Где 1 – снижение f 2 – норм. Режим 3 – снижение U
 Основную часть нагрузки (обычно от 50 до 80%) составляют асинхронные двигатели, свойства которых существенно проявляются в характере переходных процессов всего узла системы. Для них, так же как и для синхронных двигателей, различают статические характеристики, т. е. зависимости тока |/| или вращающего момента \М\ двигателя от медленно меняющегося скольжения его ротора \s\, и динамические характеристики — зависимости быстро меняющегося скольжения, напряжения и скорости их изменения (ускорения а) от тока. Так, для асинхронного двигателя
Основную часть нагрузки (обычно от 50 до 80%) составляют асинхронные двигатели, свойства которых существенно проявляются в характере переходных процессов всего узла системы. Для них, так же как и для синхронных двигателей, различают статические характеристики, т. е. зависимости тока |/| или вращающего момента \М\ двигателя от медленно меняющегося скольжения его ротора \s\, и динамические характеристики — зависимости быстро меняющегося скольжения, напряжения и скорости их изменения (ускорения а) от тока. Так, для асинхронного двигателя Для синхронного двигателя аналогичная зависимость, определяющая статическую характеристику, будет иметь вид. Эти характеристики графически представлены на рис. 11.1 и 11.2.
Для синхронного двигателя аналогичная зависимость, определяющая статическую характеристику, будет иметь вид. Эти характеристики графически представлены на рис. 11.1 и 11.2. скольжения Syc„ == 1/С = Maou/(Ja>0) тем сильнее искажаются статические механические характеристики, становясь здесь динамическими, где /ном и /п — номинальный и пусковой токи. При изучении ряда переходных процессов асинхронных двигателей приближенно можно считать, что фазовая траектория или динамическая механическая
скольжения Syc„ == 1/С = Maou/(Ja>0) тем сильнее искажаются статические механические характеристики, становясь здесь динамическими, где /ном и /п — номинальный и пусковой токи. При изучении ряда переходных процессов асинхронных двигателей приближенно можно считать, что фазовая траектория или динамическая механическая

 Рассм.с учетом отмеч-го сх.сист.(рис. 11.7, а), где сопр-е ген-ра хгг, сети хс и эквивалентного двигателя, заменяющего все двигатели нагрузки хs, соизмеримы по величине. Представим схему замещения так, как это показано на рис. 11.7, б. Затем приближённо упростим ее, перенеся левую точку, к месту приложения э. д. с Е (рис. 11.7, в).Ток, обусловленный э. д. с. в цепи 1-2 (рис. 11.7, в),
Рассм.с учетом отмеч-го сх.сист.(рис. 11.7, а), где сопр-е ген-ра хгг, сети хс и эквивалентного двигателя, заменяющего все двигатели нагрузки хs, соизмеримы по величине. Представим схему замещения так, как это показано на рис. 11.7, б. Затем приближённо упростим ее, перенеся левую точку, к месту приложения э. д. с Е (рис. 11.7, в).Ток, обусловленный э. д. с. в цепи 1-2 (рис. 11.7, в),
 откуда skp = R/x. Подставив значение sKp в (11.1), найдем
откуда skp = R/x. Подставив значение sKp в (11.1), найдем
 В справ-сти посл-го крит-я м.убед-ся исходя из экв-ной сх.зам-я (см. рис. 11.7, а)3 если напряжение на шинах комплексной нагр.рассм-ть как вел-ну, зависящую от режима двигателя, а эквивалентную э. д. с. Е = Еэ — как независимую переменную. При этом усл.м-у напр-м на шинах дв-ля и экв-ной э. д. с. Сущ-т очевидное соот-е
В справ-сти посл-го крит-я м.убед-ся исходя из экв-ной сх.зам-я (см. рис. 11.7, а)3 если напряжение на шинах комплексной нагр.рассм-ть как вел-ну, зависящую от режима двигателя, а эквивалентную э. д. с. Е = Еэ — как независимую переменную. При этом усл.м-у напр-м на шинах дв-ля и экв-ной э. д. с. Сущ-т очевидное соот-е


