Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Распределенные системы управления (РСУ)Содержание книги Похожие статьи вашей тематики
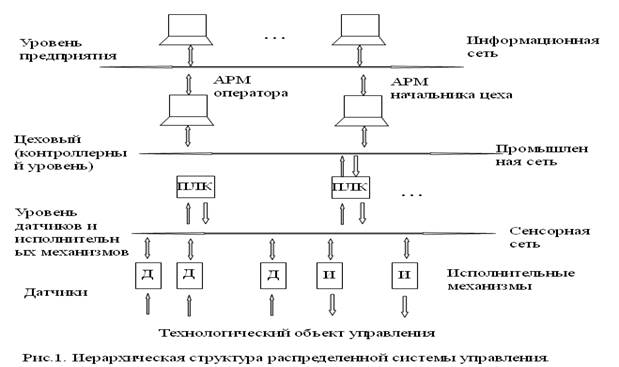
Поиск на нашем сайте Введение Стремительное развитие микропроцессорных устройств, нашедших применение в первую очередь в технических системах, изменило содержание принципов управления процессами производства. АСУТП носят характер распределенных территориально и функционально систем управления (РСУ). В качестве узловых станций в них используются промышленные ПЭВМ, программируемые контроллеры, операторские терминалы. Датчики и исполнительные устройства все чаще являются интеллектуальными, то есть осуществляют обработку и преобразование информации в цифровой сигнал в месте их установки. Распределенные системы управления (РСУ) Информация в РСУ, как правило, передается по цифровым сетям. РСУ – система, состоящая из множества устройств, разнесенных в пространстве, каждое из которых не зависит от остальных, но взаимодействует с ними для выполнения общей задачи. РСУ имеет ряд преимуществ перед сосредоточенной: больше быстродействие благодаря распределению задач между параллельно работающими устройствами, повышенную надежность, улучшенную помехоустойчивость благодаря уменьшению длины линий передачи аналоговых сигналов, меньший объем кабельной продукции. Анализ сложных РСУ позволяет выделить в них несколько уровней иерархии (рис.). Нижний (полевой) уровень включает датчики и исполнительные устройства, как правило, имеющие цифровой интерфейс, позволяющий передавать информацию по цифровым сетям нижнего уровня (AS – интерфейс, HART – протокол и др.). Второй (контроллерный) уровень состоит из программируемых логических контроллеров с модулями ввода-вывода, которые обмениваются информацией по промышленной сети (Fieldbus). На этом уровне могут использоваться ПЭВМ. Оператор процесса наблюдает за его ходом и осуществляет управление с помощью мнемосхемы на мониторе ПЭВМ (на базе SCADA-системы).
Программно–технический комплекс – основа построения РСУ Развитие современных МП-средств автоматизации и передачи данных дает возможность подходить к построению РСУ комплексно, то есть во многих случаях создавать системы на базе современных схемотехнических решений, технологий системного программирования и дружественных интерфейсов, как для эксплуатационного персонала, так и для участников разработки и проектирования АСУТП. Таким требованиям отвечают программно-технические комплексы (ПТК), создаваемые рядом фирм (см. главу). В состав ПТК входит: 1.Семейство современных микропроцессорных контроллеров (ПЛК) различной информационной мощности – от малоканальных регуляторов до ПЛК, обрабатывающих более 1000 входных и выходных сигналов. 2.Персональные компьютеры, используемые как для создания интерфейса «человек-система» для управляющего персонала, так и для обеспечения информационных задач системы. 3.Цифровые сети передачи данных на всех уровнях РСУ, включая сетевое оборудование. 4.Системное программное обеспечение, в том числе операционные системы компьютеров, программное обеспечение ПЛК. Структура распределенной системы управления Современное промышленное предприятие невозможно представить без систем автоматизации. Совершенствование этих систем ведет к улучшению качества продукции, уменьшению энергопотребления, минимизации материальных затрат, повышению уровня безопасности и сокращению загрязнения окружающей среды. В настоящее время широко используется такое понятие как «автоматизированная система управления» (АСУ), работа которой предполагает участие человека. Его роль заключается, прежде всего, в наблюдении за ходом технологического процесса или, более широко — производственного процесса на предприятии. При необходимости человек принимает решения по изменению задач управления, реализация этих решений может быть выполнена как человеком, так и управляющей системой. Отметим, что участие человека в управлении возможно как непосредственно на отдельном участке технологического процесса, так и при организации управления в целом цехом или предприятием. С увеличением территории, на которой расположен управляемый объект (а, следовательно, и АСУ), с ростом числа датчиков получения информации об объекте и усложнением алгоритмов управления становится более эффективным применение распределенных систем. Современные системы управления построены на представлении информации о процессе, передаче и обработке этой информации в цифровом виде. Таким образом, основными элементами АСУ являются: · компьютеры, на базе которых организованы автоматизированные рабочие места персонала; программируемые логические контроллеры (ПЛК), осуществляющие процесс управления. АРМ руководителей предприятия. На рис. 1 представлена структура многоуровневой распределенной системы управления. Она является иерархической, то есть нижние уровни подчиняются вышестоящим. Она является распределенной, так как состоит из многих компьютеров и ПЛК, между которыми распределены функции сбора, обработки данных и управления. Автоматические регуляторы Автоматический регулятор на входе имеет информацию о текущем и заданном значениях регулируемой величины. Он выполняет следующие функции: вычисление отклонения, т.е. разности между текущим и заданным значениями регулируемой величины; вычисление в зависимости от отклонения управляющего воздействия в соответствии с законом регулирования. Автоматические регуляторы классифицируются в зависимости от регулируемого параметра, используемой энергии, характера изменения регулирующего воздействия. Современные регуляторы, как правило, являются универсальными. На их входы подается информация о любой измеряемой величине, преобразованной в унифицированный сигнал. Таким образом, выходной сигнал регулятора не зависит от того, какова регулируемая величина-температура, давление и т.д., однако в некоторых случаях выпускаются промышленные регуляторы для конкретной технологической величины, например, температуры. В зависимости от источника используемой энергии автоматические регуляторы подразделяются на регуляторы прямого и непрямого действия. В регуляторах прямого действия одновременно с изменением регулируемой величины от объекта отбирается часть энергии, которая используется для работы регулятора и воздействия на его исполнительный механизм и регулирующий орган объекта. Таким образом, к регулятору энергия извне не подводится. К регуляторам непрямого действия извне подводится энергия для работы самого регулятора и воздействия на исполнительный механизм. По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на линейные и нелинейные. Линейные регуляторы формируют свой выходной сигнал (регулирующее воздействие) в соответствии с одним из линейных законов регулирования: П- пропорциональный, ПИ - пропорционально-интегральный, ПИД – пропорционально-, интегрально - дифференциальный. ПИД - регулирование В общем случае автоматическое поддержание заданного значения (уставки) регулируемой величины происходит в соответствии со схемой показанной на рис. Рис Схема замкнутой системы регулирования. В настоящее время подавляющее большинство автоматических регуляторов является цифровыми. Выходной сигнал в них рассчитывается по формуле: Yi 1/ Xp [ Ei +1/ tn* ΣE i *Δ tизм+ tg*Δ E i /Δ tизм ]*100%, где Где: Xp - полоса пропорциональности в пределах которой справедлив П - закон; Ei - рассогласование; T g - постоянная времени дифференцирования; Δ E i - разность между двумя соседними измерениями E i и E i-1; Δ t изм - время между двумя соседними измерениями Тi и Тi-1; t n - постоянная времени интегрирования; ΣE i - накопленная в i-й момент времени сумма рассогласований (интегральная сумма); Выходные устройства ПИД регулятора могут быть: · ключевого типа (см. описание работы двухпозиционного регулятора); · аналогового типа - цифроаналоговый преобразователь, который формирует аналоговый сигнал, так называемую токовую петлю 4-20 мА (пропорциональный выходному сигнальному ре Yi). Если выходное устройство ключевого типа - выходной сигнал преобразуется в последовательность управляющих импульсов длительностью D (см. рис.) D= Y*Tсл /100% Где: D - длительность импульса, с; Tсл - период следования импульсов, с; Y- выходной сигнал регулятора;
Рис Перемещение по (в) регулятором с импульсным выходом совместно с исполнительным механизмом постоянной скорости при различных движений импульса (а, б) Как видно из рис, при одном переходе Тсл длительность импульса определяется значением выходного сигнала У. Эти импульсы Д передаются на исполнительное устройство регулятора. Такое преобразование выходного сигнала для управления называется шикарно-импульсной модуляции(ШИМ). Выходное устройство ключевого типа включает исполнительный механизм постоянной скорости (ИМПС) на время Д, с. Результирующее перемещение регулирующего органа объекта с помощью ИМПС показанной на рис. Регулирующий клапан имеет электропривод (электродвигатель ИМа) и две пары контактов для управления направлением его вращения. Рис Регулятор с выключенными реле (а) и графики регулируемой величины с состояние реле (б). На рис. а показана связь выходных реле регулятора с электродвигателем ИМа. На рис. б приведен график изменения регулируемой величины относительно Tуст и соответствующие импульсы D управления клапаном. При Т< Tуст подаются импульсы на открытие клапана, при Т> Tуст – на закрытие. Из рис. ясно, что чем больше Т-Tуст , тем больше длительность импульса (ШИМ). Как видно из рис., при одном периоде Tсл длительность импульса определяется значением выходного сигнала Y. Эти импульсы D передаются на исполнительное устройство регулятора. Такое преобразование выходного сигнала для управления называется, широко-импульсной модуляцией (ШИМ). Выходное устройство ключевого типа включает исполнительный механизм постоянной скорости (ИМПС) на время D, с. Результирующее перемещение регулирующего органа объекта с помощью ИМПС показано на рис. Введение Стремительное развитие микропроцессорных устройств, нашедших применение в первую очередь в технических системах, изменило содержание принципов управления процессами производства. АСУТП носят характер распределенных территориально и функционально систем управления (РСУ). В качестве узловых станций в них используются промышленные ПЭВМ, программируемые контроллеры, операторские терминалы. Датчики и исполнительные устройства все чаще являются интеллектуальными, то есть осуществляют обработку и преобразование информации в цифровой сигнал в месте их установки. Распределенные системы управления (РСУ) Информация в РСУ, как правило, передается по цифровым сетям. РСУ – система, состоящая из множества устройств, разнесенных в пространстве, каждое из которых не зависит от остальных, но взаимодействует с ними для выполнения общей задачи. РСУ имеет ряд преимуществ перед сосредоточенной: больше быстродействие благодаря распределению задач между параллельно работающими устройствами, повышенную надежность, улучшенную помехоустойчивость благодаря уменьшению длины линий передачи аналоговых сигналов, меньший объем кабельной продукции. Анализ сложных РСУ позволяет выделить в них несколько уровней иерархии (рис.). Нижний (полевой) уровень включает датчики и исполнительные устройства, как правило, имеющие цифровой интерфейс, позволяющий передавать информацию по цифровым сетям нижнего уровня (AS – интерфейс, HART – протокол и др.). Второй (контроллерный) уровень состоит из программируемых логических контроллеров с модулями ввода-вывода, которые обмениваются информацией по промышленной сети (Fieldbus). На этом уровне могут использоваться ПЭВМ. Оператор процесса наблюдает за его ходом и осуществляет управление с помощью мнемосхемы на мониторе ПЭВМ (на базе SCADA-системы).
|
||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 4737; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.102 (0.008 с.) |