
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кафедра автоматизации и вычислительной техникиСодержание книги Поиск на нашем сайте
КАФЕДРА АВТОМАТИЗАЦИИ И ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовой работе на тему: Электронная сигнализация для автомобиля
Выполнил студент группы АТПб-09-1 Семёнов Павел
Принял доцент кафедры АВТ Мусихин С.А.
Тюмень - 2011
Содержание
Введение…………… ……………………………………………………..…………………3 Описание и принципы работы автосигнализации 5 Принципы построения автосигнализации 9 Применение датчиков в автосигнализации 15 Заключение 35 Список литературы 36
Введение
Автоматизация является качественно новым этапом в совершенствовании производства. Основные обязанности человека в этом случае – наблюдение за параметрами процесса и выполнение внештатных операций. Применение средств автоматизации позволяет увеличить число агрегатов и механизмов, обслуживаемых одним человеком. Основные операции, которые выполняет человек в этом процессе – включение и отключение агрегатов, а в случае возникновения нештатных ситуаций – отключение регулятора и принятия на себя функции регулирования. Для этого он пользуется средствами дистанционного управления механизированными приводами различных регулирующих органов применение средств технологической защиты, блокировки и автоматического включение резервных механизмов позволяет автоматизировать и сам процесс ликвидации аварийных положений. Автоматизация производственных процессов развилась по пути замены тяжелого физического труда человека работой механизмов. Механизация ручных операций на производственных предприятиях создала предпосылки для передачи технологическим регуляторам операций по управлению производственными процессами. При автоматизации одной области промышленности возникает потребность в перенастройке технологии, аппаратуры и организации в смежной области. Автоматизация приносит наибольший эффект в тех случаях, когда технологи, конструкторы, специалисты по организации и планированию работают в тесном контакте со специалистами по автоматизации. Такая совместная работа предполагает их взаимопонимание, которое может быть достигнуто лишь в том случае, если специалисты различных профессий будут иметь общие представления автоматизации производственных процессов. Таким образом, автоматизация работы оборудования включает: механизацию тяжелых работ и трудоемких процессов, дистанционное управление, автоматизацию непрерывных процессов, автоматическое регулирование по заданной программе. К функциям контроля за состоянием объектов относят: технологическая защита, блокировка, автоматическое включение резерва, технологическая сигнализация. Сигнализация автоматически подает сигнал при срабатывании защиты, блокировки, а так же при включении резерва и служит для привлечения внимания дежурного персонала к месту возникновения неисправности. Контролем за состоянием объекта управления называется процесс получения информации. Основной задачей системы автоматического контроля является измерение параметров объекта управления и сравнения текущих значений с допустимыми, регистрация значений параметров и их текущих отклонений от заданных, сигнализация возникновения нештатных ситуаций. По расстоянию от объекта до средств автоматического контроля системы бывают сосредоточенного, дистанционного и телемеханического контроля. Системы сосредоточенного контроля размещают в непосредственной близости от объекта управления. Системы дистанционного контроля размещают на определенном расстоянии от объекта управления, они содержат специальные средства предварительной обработки для передачи контролируемых параметров по линиям связи. Системы телемеханического контроля позволяют осуществить беспроводную связь с объектом управления. Применение отдельных видов автоматизации не освобождает персонал от выполнения ряда ручных операций и не позволяет сократить численность персонала до возможного минимума. Поэтому полный эффект от автоматизации достигается лишь при комплексном использовании всех ее средств в разумном сочетании. В данном курсовом проекте будет рассмотрена система охранной сигнализации. Разработано: описание технологии монтажа данной системы, инструкция по монтажу, регулировке и ремонту системы охранной сигнализации.
Описание и принципы работы автосигнализации Область применения автосигнализации
Автосигнализация - электронное устройство, установленное в автомобиль, предназначенное для его защиты от угона, кражи компонентов данного транспортного средства или других вещей, находящихся в автомобиле. Устанавливается в автомобилях. Автосигнализация (автомобильная охранная система) - устройство, предназначенное для предотвращения запуска двигателя посторонними лицами и контроля доступа в салон, капотное пространство и багажник, а также для формирования предупреждающих и оповещающих сигналов при попытках взлома и вторжения в автомобиль.
Основные компоненты автосигнализации
Состоит, как правило, из основного блока, приемо-передатчика (антенны), брелока, датчика удара, сервисной кнопки и индикатора в виде светодиода. Автосигнализации бывают с обратной связью, то есть брелок-пейджер информирует о состоянии автомобиля. Современные сигнализации – это сложные многоуровневые системы, которые включают в себя множество компонентов, из которых и складывается весь комплекс защиты. К таким компонентам можно отнести: встраиваемые сенсорные датчики движения машины, изменения угла наклона или удара; акустические датчики, реагирующие на звук разбития стекла; спутниковая система позиционирования, сделанная по аналогии с системой GPS; различные иммобилайзеры и устройства для блокировки важнейших узлов автомобиля и так далее. Кроме того, новые сигнализации обычно меньше своих предшественников по размеру, а в целях защиты от электронного взлома используется многоканальный радиотракт с диалоговым кодом, паролем и персональным шифровальным ключом, длина которого может доходить до 80 бит, что дополнительно улучшает криптостойкость. Могут быть использованы и дополнительные реле блокировки, обладающие модулями для управления замком капота и динамическим кодом. Дальность действия сигнализации может доходить до 20-х километров при условии прямой видимости и отсутствия помех для прохождения радиосигнала с миниатюрного брелока-передатчика. Такие системы устанавливаются на автомобили с любыми типами двигателей и коробок переключения передач и автоматических, и ручных, в том числе и для турбированных силовых агрегатов, позволяют контролировать и управлять ими даже с максимально допустимой дистанции. Из наиболее популярных вспомогательных устройств назовем радиомаяк (пейджер) и центральный замок. Радиомаяк (пейджер). При срабатывании сигнализации передатчик пейджера выдает в эфир кодированный радиосигнал, принимаемый миниатюрным приемником. В новых моделях пейджеров кроме сигнала тревоги есть еще и возможность идентификации сработавшего датчика - очень удобно для оценки ситуации. К примеру, при работе с радарным датчиком пейджер передаст владельцу сообщение о приближении к охраняемой машине, не включая сигнализацию. Реальная дальность при работе со стандартной антенной, наклеиваемой изнутри салона на стекло - 200-300 м прямой видимости. С качественной выносной антенной передатчик пейджера теоретически может обеспечить и 2 км. Центральный замок. Функция дистанционного открывания и закрывания автомобильных дверных замков. Важно подчеркнуть, что на самом деле механической блокировки замка не происходит (распространенное заблуждение) - это - функция комфорта. Как и любое электромеханическое устройство, требует хотя бы элементарного обслуживания. Принципы построения автосигнализации Применение датчиков в автосигнализации Расчет датчиков Датчик давления Датчик давления реализован на емкостного датчика (конденсатора), одна обкладка (пластина) которого неподвижна, а другая перемещается под воздействием внешней силы. Необходимо: − рассчитать предельные значения емкости датчика давления и построить график зависимости емкости от расстояния между обкладками (пластинами) (считать, что ε = 100); − построить график зависимости сопротивления датчика давления от частоты электрического сигнала для средней емкости; − выбрать оптимальную рабочую частоту (fопт) датчика; − рассчитать и построить график падения действующего напряжения на датчике, который включен в электрическую измерительную цепь во всем диапазоне изменения емкости датчика. Измерительная цепь питается от генератора синусоидального сигнала. Исходные данные: − площадь обкладок пластин, − расстояние между обкладками конденсатора, − напряжение, − характеристика среды, − диэлектрическая постоянная, Предельные значения емкости определяем по формулам 1 и 2.
На рисунке 5 представлен график зависимости емкости от расстояния между обкладками конденсатора
Рисунок 5 − График зависимости емкости от расстояния между обкладками конденсатора
Среднее расстояние между обкладками конденсатора определяем по формуле 3.
Среднюю ёмкость определяем по формуле 4.
Сопротивление конденсатора рассчитывается по формуле 5.
где f − частота электрического сигнала, Гц. На рисунке 6 представлен график зависимости сопротивления конденсатора от частоты электрического сигнала
Рисунок 6 − График зависимости сопротивления конденсатора от частоты электрического сигнала
Выбор оптимальной частоты fопт сводится к нахождению касательной к графику, представленному на рисунке 9, которая имеет наклон 45°. Итак, из графика Схема включения в цепь датчика давления представлена на рисунке 7.
Рисунок 7 − Схема включения в цепь датчика давления
Генератор сигналов работает на оптимальной частоте. Сигнал от него имеет форму Действующее значение напряжения для синусоидального сигнала не зависит от частоты и рассчитывается по формуле 6.
Напряжение в датчике определяем по формуле 7.
В зависимости от расстояния между обкладками конденсатора формула 7 примет вид График падения действующего напряжения на датчике в пределах d
Рисунок 8 − График падения действующего напряжения на датчике Датчик тока Датчик тока выполнен в виде тороидальной измерительной катушки индуктивности, которая охватывает проводник с током. Эквивалентная схема измерительной цепи приведена на рисунке 9. Необходимо: − рассчитать и построить график коэффициента передачи датчика по току в зависимости от частоты сигнала, протекающего в проводе (для минимального
Рисунок 9 − Эквивалентная схема измерительной цепи
− построить график зависимости коэффициента трансформации датчика тока, от предельных значений радиуса провода. Исходные данные: − сопротивление нагрузки датчика, Zн = 50 Ом; − число витков катушки, − коэффициент связи, g = 0,4; − средний диаметр тора, − диаметр среднего витка, − радиус уединенного прямолинейного провода круглого сечения, − постоянная составляющая, Индуктивность тороидальной катушки кругового сечения, представленной на рисунке 10 определяется по формуле 8.
Рисунок 10 − Тороидальная катушка кругового сечения.
Индуктивность уединенного прямолинейного провода круглого сечения определяем по формуле 9.
Коэффициент передачи датчика по току определяется по формуле 10.
где
График изменения коэффициент передачи датчика по току в зависимости от частоты представлен на рисунке 11. Коэффициент трансформации датчика тока определяем по формуле 11.
Рисунок 11 − График изменения коэффициент передачи датчика по току в зависимости от частоты.
Зависимости коэффициента трансформации датчика тока, от предельных значений радиуса провода примет вид График зависимости коэффициента трансформации датчика тока, от предельных значений радиуса провода представлен на рисунке 12.
Рисунок 12 − График зависимости коэффициента трансформации датчика тока, от предельных значений радиуса провода. Датчик Холла Необходимо: − определить максимальное выходное напряжение с датчика, если вектор магнитного поля ориентирован к вектору силы тока под углом φ. А изменение вектора индукции описывается по закону
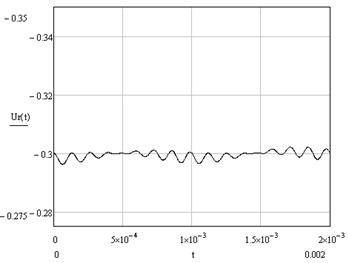
− построить график временной зависимости изменения выходного напряжения с датчика. Построить график зависимости падения напряжения на сопротивлении нагрузки. Исходные данные: − толщина кристалла, − коэффициент Холла, − сопротивление нагрузки, − емкость конденсатора, − магнитная индукция, − сила тока, − частоты, − угол φ = 11°. Для выходного напряжения с учётом угла φ и заданных законов, описывающих изменение вектора магнитной индукции, имеем зависимость
График зависимости выходного напряжения датчика от времени представлен на рисунке 13. Максимальное выходное напряжение из графика (рисунок 16) Определяем сопротивление конденсатора по формуле 12. автосигнализация схема датчик
Рисунок 13 − График зависимости выходного напряжения датчика от времени.
Ток в цепи резистора в зависимости от времени определяется как
Падение напряжения на резисторе представляется зависимостью
График падения напряжения на сопротивлении нагрузки представлен на рисунке 14.
Рисунок 14 − График падения напряжения на сопротивлении нагрузки. Пьезоэлектрический датчик Цилиндрический пьезоэлектрический датчик изготовлен из титана бария и представлен на рисунке 21.
Рисунок 21 − Цилиндрический пьезоэлектрический датчик
Механическая сила F воздействует на датчик вдоль его продольной оси, в результате чего, на противоположных краях кристалла появляется ЭДС. Необходимо: − найти максимальную ЭДС датчика; − определить максимальное входное напряжение на усилителе, если датчик включён по схеме приведённой на рисунке 22; − определить модуль чувствительности схемы; − определить максимальное выходное напряжение с усилителя; Исходные данные: − пьезоэлектрический модуль, − механическая сила, − частота, f = 10000 Гц; − радиус кристалла, − высота кристалла, − диэлектрическая составляющая, − входное сопротивление усилителя, − входная ёмкость усилителя, − коэффициент усиления, K = 10; − диэлектрическая постоянная,
Рисунок 22 − Эквивалентная схема пьезоэлектрического датчика
Определяем выходную ёмкость с датчика по формуле 18.
Механическое воздействие подчиняется заданному закону
Определяем максимальную ЭДС датчика по формуле 19.
Определяем максимальное входное напряжение по формуле 20.
Модуль чувствительности заданной схемы определяется заданным выражением 21.
где График изменения модуля чувствительности представлен на рисунке 23.
Рисунок 23 − График изменения модуля чувствительности
Определяем максимальное выходное напряжение с усилителя по формуле 22.
3.3.7 Преобразование экспериментальных данных в аналитическую функцию Необходимо: − по полученным экспериментальным данным с датчика, отображающих зависимость выходного напряжения от массового расхода воздуха, построить аналитическую функцию для дальнейшего расчёта микроконтроллером промежуточных значений. − построить график относительной погрешности расхождения экспериментальных данных выходного напряжения от аналитических. Исходные данные: − экспериментальные данные выходного напряжения, − экспериментальные данные расхода воздуха, M = [0; 1; 2; 3; 4; 5; 6] г/сек. Для получения аналитической зависимости используем метод наименьших квадратов. Аналитическая зависимость должна иметь вид Общая формула метода наименьших квадратов – формула 23.
Прологарифмируем экспериментальные значения выходного напряжения, − возьмём натуральный логарифм от каждого значения из массива Наёдём коэффициенты a и b из системы уравнений 23. Здесь значения В результате решения системы уравнений получаем значения искомых коэффициентов: a = -0,85 и b = 2,501. Аналитическая зависимость
Рисунок 24 − График аналитической зависимости
Найдём относительную погрешность расхождения экспериментальных данных выходного напряжения от аналитических. Отметим, что в качестве экспериментальных данных при расчёте погрешностей используем массив Итак, имеем Относительную погрешность определяем по формуле 24.
Полученные значения относительной погрешности Список литературы
1. http://mondeo.km.ru. 2. Инструкция к автосигнализации APS 2500. 3. www.bestreferat.ru. 4. Автономные электронные системы: Пер с япон. / Исии Х., Иноуэ Х., Симояма И. и др. - М.: Мир, 1988. - С. 318. - ISBN 5-03-000059-3. 5. Карнаухов Н.Ф. Электромеханические и электронные системы. - Ростов н/Д: Феникс, 2006. - С. 320. - ISBN 5-222-08228-8. 6. Введение в электронику: В 2 кн. / Тугенгольд А.К., Богуславский И.В., Лукьянов Е.А., Герасимов В.А., Коротков О.Е., Носенков Д.А., Череватенко В.А. Под ред А.К. Тугенгольда. - 2-е изд., перераб и доп. - Ростов н/Д: Издательский центр ДГТУ, 2002. - С. 162.
Размещено на Allbest.ru КАФЕДРА АВТОМАТИЗАЦИИ И ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовой работе на тему: Электронная сигнализация для автомобиля
Выполнил студент группы АТПб-09-1 Семёнов Павел
Принял доцент кафедры АВТ Мусихин С.А.
Тюмень - 2011
Содержание
Введение…………… ……………………………………………………..…………………3 Описание и принципы работы автосигнализации 5 Принципы построения автосигнализации 9 Применение датчиков в автосигнализации 15 Заключение 35 Список литературы 36
Введение
Автоматизация является качественно новым этапом в совершенствовании производства. Основные обязанности человека в этом случае – наблюдение за параметрами процесса и выполнение внештатных операций. Применение средств автоматизации позволяет увеличить число агрегатов и механизмов, обслуживаемых одним человеком. Основные операции, которые выполняет человек в этом процессе – включение и отключение агрегатов, а в случае возникновения нештатных ситуаций – отключение регулятора и принятия на себя функции регулирования. Для этого он пользуется средствами дистанционного управления механизированными приводами различных регулирующих органов применение средств технологической защиты, блокировки и автоматического включение резервных механизмов позволяет автоматизировать и сам процесс ликвидации аварийных положений. Автоматизация производственных процессов развилась по пути замены тяжелого физического труда человека работой механизмов. Механизация ручных операций на производственных предприятиях создала предпосылки для передачи технологическим регуляторам операций по управлению производственными процессами. При автоматизации одной области промышленности возникает потребность в перенастройке технологии, аппаратуры и организации в смежной области. Автоматизация приносит наибольший эффект в тех случаях, когда технологи, конструкторы, специалисты по организации и планированию работают в тесном контакте со специалистами по автоматизации. Такая совместная работа предполагает их взаимопонимание, которое может быть достигнуто лишь в том случае, если специалисты различных профессий будут иметь общие представления автоматизации производственных процессов. Таким образом, автоматизация работы оборудования включает: механизацию тяжелых работ и трудоемких процессов, дистанционное управление, автоматизацию непрерывных процессов, автоматическое регулирование по заданной программе. К функциям контроля за состоянием объектов относят: технологическая защита, блокировка, автоматическое включение резерва, технологическая сигнализация. Сигнализация автоматически подает сигнал при срабатывании защиты, блокировки, а так же при включении резерва и служит для привлечения внимания дежурного персонала к месту возникновения неисправности. Контролем за состоянием объекта управления называется процесс получения информации. Основной задачей системы автоматического контроля является измерение параметров объекта управления и сравнения текущих значений с допустимыми, регистрация значений параметров и их текущих отклонений от заданных, сигнализация возникновения нештатных ситуаций. По расстоянию от объекта до средств автоматического контроля системы бывают сосредоточенного, дистанционного и телемеханического контроля. Системы сосредоточенного контроля размещают в непосредственной близости от объекта управления. Системы дистанционного контроля размещают на определенном расстоянии от объекта управления, они содержат специальные средства предварительной обработки для передачи контролируемых параметров по линиям связи. Системы телемеханического контроля позволяют осуществить беспроводную связь с объектом управления. Применение отдельных видов автоматизации не освобождает персонал от выполнения ряда ручных операций и не позволяет сократить численность персонала до возможного минимума. Поэтому полный эффект от автоматизации достигается лишь при комплексном использовании всех ее средств в разумном сочетании. В данном курсовом проекте будет рассмотрена система охранной сигнализации. Разработано: описание технологии монтажа данной системы, инструкция по монтажу, регулировке и ремонту системы охранной сигнализации.
|
||||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 447; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.95 (0.028 с.) |

 м2;
м2; м,
м,  м;
м; В;
В; ;
; ;
; , (1)
, (1) ; (2)
; (2) Ф,
Ф, Ф.
Ф.

 , (3)
, (3) м.
м. , (4)
, (4) Ф.
Ф. . (5)
. (5) .
.
 Гц при
Гц при  Ом.
Ом.
 . Сопротивление R выбирается из условия R = rс, где rсрассчитывается дляdср на fопт.
. Сопротивление R выбирается из условия R = rс, где rсрассчитывается дляdср на fопт. , (6)
, (6) В.
В. . (7)
. (7) , где соответственно
, где соответственно  .
. [dмин; dмах] представлен на рисунке 8.
[dмин; dмах] представлен на рисунке 8.

 ;
; м;
м; м;
м; м;
м; .
.
 , (8)
, (8) Гн.
Гн. , (9)
, (9) Гн.
Гн. , (10)
, (10) − сила тока, протекающего по проводу, который охватывает измерительная катушка, А;
− сила тока, протекающего по проводу, который охватывает измерительная катушка, А; ,
, .
. , (11)
, (11) .
.
 , где
, где  .
.
 ,
,  .
. м;
м; Ом;
Ом; Ом;
Ом; Ф;
Ф; Тл,
Тл,  Тл;
Тл; А;
А; Гц,
Гц,  Гц,
Гц,  Гц;
Гц; .
. В.
В. , (12)
, (12)
 Ом.
Ом. .
. .
.

 Кл/Н;
Кл/Н; Н;
Н; м;
м; м;
м; ;
; Ом;
Ом; Ф;
Ф; .
.
 , (18)
, (18) Ф.
Ф. .
. , (19)
, (19) .
. , (20)
, (20) В.
В. , (21)
, (21) .
.
 , (22)
, (22) В.
В. =[7,389; 3,857; 2,014; 1,051; 0,549; 0,287; 0,150] мВ.
=[7,389; 3,857; 2,014; 1,051; 0,549; 0,287; 0,150] мВ. , где a и b − коэффициенты.
, где a и b − коэффициенты. , (23)
, (23) соответственно равны данным из массива M; значения
соответственно равны данным из массива M; значения  соответственно равны данным из массива
соответственно равны данным из массива 
 . В качестве истинных значений принимаем аналитические данные.
. В качестве истинных значений принимаем аналитические данные. , (24)
, (24) .
.


