
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет показателей тягово-скоростных свойств автомобиляСтр 1 из 5Следующая ⇒
Пример листа исходных данных Марка автомобиля.
1. Номинальная мощность двигателя, 2. Угловая скорость вращения коленчатого вала двигателя, соответствующая номинальной мощности, 3. Максимальный крутящий момент двигателя, 4. Угловая скорость вращения коленчатого вала двигателя, соответствующая максимальному крутящему моменту, 5. Радиус качения колеса, 6. Передаточные отношение передач коробки переменных передач,
7. Передаточное число главной передачи, 8. Число пар цилиндрических шестерен, передающих энергию на данной передаче, 9. Число пар конических и гипоидных шестерен, 10. Число карданных шарниров, 11. Полный вес автомобиля, 12. Вес, приходящийся на переднюю ось, 13. Вес, приходящийся на заднюю ось, 14. Снаряженный (собственный) вес автомобиля, 15. Вес, приходящийся на переднюю ось, 16. Вес, приходящийся на заднюю ось, 17. Габаритная ширина автомобиля, 18. Дорожный просвет, Н 19. Ширина колеи колес задней оси, В 20. Габаритная высота автомобиля, 21. База (расстояние межу осями) автомобиля, 22. Высота центра тяжести автомобиля, 23. Плотность топлива 24. Минимальный радиус поворота автомобиля, R=5,5 м; 25. Марка шин: 175/80R16; 26. Коэффициент сопротивления уводу одного колеса передней оси 27. Коэффициент сопротивления уводу одного колеса задней оси, 28. Суммарная жесткость шин переднего моста, 29. Суммарная жесткость шин заднего моста, 30. Суммарная жесткость передней подвески, 31. Суммарная жесткость задней подвески,
Данные для расчета с 1по 21 выбираются из
Расчет показателей тягово-скоростных свойств автомобиля Методика расчета показателей тягово-скоростных свойств автомобиля График силового баланса
Построение графика силового баланса начинается с определения всех сил, действующих на автомобиль, записанных в виде уравнения тягового баланса
где
Полная окружная сила Pk на ведущих колёсах определяется по формуле:
где: Ме’ – текущее значение крутящего момента двигателя, соответствующее угловой скорости ωе и рассматриваемой скорости движения автомобиля, умноженное на коэффициент коррекции К Текущее значение крутящего момента двигателя Ме’ определяется по формуле: Ме’ = Ме ·Кр, (1.11) итр – передаточное отношение трансмиссии. Определяется по формуле: итр = икп ·игп .идп, (1.12) где икп – передаточное отношение КПП (для каждой передачи, из исходных данных); игп – передаточное отношение главной передачи (из исходных данных). ηтр – КПД трансмиссии. Определяется по формуле: hтр = 0,98 k ×0,97 l ×0,99 m, (1.13) где k* – число пар цилиндрических шестерён, передающих энергию на данной передаче; l *– число пар конических и гипоидных шестерён; m* – число карданных шарниров. rk – радиус качения колеса, м. Определяется по формуле: r где: d** – диаметр обода, м; В** – номинальная ширина профиля, м;
Для отечественных шин r * - знаачения k, l, m определяются студентом, самостоятельно, исходя из конструкции трансмиссии, заданного автомобиля и согласовываются с преподавателем; ** - значения d, В, Скорость движения автомобиля при частоте вращения коленчатого вала we и соответствующей передаче определяется по формуле: Va = ωe ·rk /итр , (1.15) Сила сопротивления дороги равна, Н: Рψ = Рf +Pi; (1.16) Рf = f ·Ga ·cos где: f – коэффициент сопротивления качения; Gа - вес автомобиля, Н;
Рi = Ga ·sin С учетом того, что ·sin Рψ = Ga ·(f + i) ≈ Ga · ψ. (1.19) где: ψ – коэффициент суммарного дорожного сопротивления; Значения Рψ рассчитываются для горизонтального дороги с асфальтобетонным покрытием, следовательно ψ = f.
Величина коэффициента сопротивления качения для малой скорости, до 50 км/ч, принимается равной fo = 0,015. Для скоростей движения, больших 50 км/ч, коэффициент сопротивления качения определяется по формуле: f = fo · [1+(0,020 ·Va) 2 ], (1.20) где Va – скорость автомобиля, м/с. Сила сопротивления воздуха РВ определяется по формуле: РВ = kВ ·F ·Va2, (1.21) где kВ – коэффициент сопротивления воздуха, Н·с2 ·м -4; F – площадь лобового сопротивления, м 2; Va – скорость автомобиля, м/с. Коэффициент сопротивления воздуха принимается равным: - для легковых автомобилей kВ = 0,17- 0,3 Н·с2 ·м -4 - для автобусов kВ = 0,25- 0,4 Н·с2 ·м -4 - для грузовых автомобилей kВ = 0,5- 0,7 Н·с2 ·м -4 - для автопоездов kВ = 0,55- 0,9 Н·с2 ·м -4 Площадь лобового сопротивления приближенно может быть определена по выражению: F = где: Вг и Нг - габаритная ширина и высота автомобиля соответственно, м. Сила сопротивления разгону автомобиля Р Р где:
где: uкп – передаточное число коробки перемены передач на каждой передаче (из исходных данных); Для одиночных автомобилей принимают: m dv/dt – ускорение автомобиля, м/с Сила сопротивления разгону рассчитывается из уравнения силового баланса или определяется графически из тяговой характеристики. Результаты расчёта параметров для построения графиков тяговой характеристики приведены в таблице 3.
Таблица 3 – Результаты расчета*
На рис. 2 приведен пример тяговой характеристики автомобиля.
____________________________________________________________________________ * Если Ваш автомобиль имеет пять и более передач, то и для них проводятся аналогичные расчеты. Для автомобилей имеющих демультипликатор (автомобили повышенной проходимости) дополнительно необходимо посчитать показатели тягово-скоростных свойств на первой пониженной и первой повышенной передачах. Дополнительное задание: По графику силового баланса определить: - диапазон скоростей на каждой передаче - максимальную скорость; - максимальную силу сопротивления разгону на высшей передаче. - рассчитать путь выбега АТС со скорости 50 км/ч при коэффициенте сопротивления качению 0,015 и силе сопротивления воздуха при скорости 50 км/час. 1.1.3 М ощностной баланс автомобиля Для получения графического изображения мощностного баланса автомобиля, воспользуемся следующим уравнением:
(1.25)
Nk = Nf +Ni +NB +Nи, (1.26) где Nk – мощность, подводимая к ведущим колёсам, кВт; Nf – мощность, затрачиваемая на сопротивление качению, кВт; Ni – мощность, сопротивлению подъёму, кВт; NB – мощность, затрачиваемая на преодоление сопротивления воздуха, кВт; Nи – мощность, затрачиваемая на разгон автомобиля, кВт. Результаты расчетов сводятся в таблицу 4
Таблица 4 - Результаты расчета
На основании данных таблицы 4 стоим график мощностного баланса автомобиля. На графике (рис. 3) изображена зависимость мощности, подводимой к ведущим колёсам, а также суммарной мощности, затрачиваемой на преодоление сопротивления дороги и воздуха, от скорости движения на различных передачах. Разность этих двух мощностей даёт мощность, которую можно реализовать для разгона автомобиля.
Дополнительное задание: По графику мощностного баланса определить максимальный запас мощности.
Устойчивость автомобиля
В качестве оценочных показателей поперечной устойчивости автомобиля при движении принимают критическую скорость по боковому скольжению Vз (заносу) и критическую скорость по боковому опрокидыванию Vоп, определяемые соответственно по выражениям:
где g – ускорение силы тяжести, g = 9,81 м/с2; R – радиус кривой полотна дороги в плане, м; B – колея автомобиля, м; hg – высота центра масс автомобиля, м (для ряда отечественных автомобилей ориентировочные значения приведены в приложении 1); j - коэффициент сцепления (в данном разделе принимают j = 0,6). Задавая несколько значений радиуса кривой полотна дороги от 20 до 100 м, определяют критические скорости движения автомобиля, по которым строят график поперечной устойчивости.
Результаты расчётов сводятся в табл. 2.5
Таблица 2.5 - Результаты расчёта
По данным табл. 2.5 строится график зависимости критических скоростей движения от радиуса поворота (рис. 2.3).
Рис. 2.3 График зависимости критических скоростей движения от радиуса поворота Дополнительное задание: По графику критических скоростей определить критические скорости по заносу и опрокидыванию на кривой R = 60 м. Рассчитать величину предельного угла косогора по опрокидыванию Управляемость автомобиля Управляемость автомобиля определяется степенью соответствия траектории его движения положению управляемых колёс. Если управляемые колёса повёрнуты на угол q (средний угол поворота обоих управляемых колёс), то точка, лежащая на середине оси неуправляемых колёс, должна двигаться по дуге радиуса R (при отсутствии увода колес):
где L – база автомобиля, м. При нейтральном положении управляемых колёс q = 0, а R = ∞, т.е. траектория движения прямая линия. Однако это требование управляемости автомобиля может быть нарушено из-за бокового увода или бокового скольжения управляемых колёс. Зависимость критической скорости по управляемости Vупр от угла поворота управляемых колёс выражается уравнением:
где jy – коэффициент сцепления шин с дорогой в поперечном направлении (jy = 0,6); f – коэффициент сопротивления качению (f = 0,02); L – база автомобиля, м; Ө – средний угол поворота управляемых колёс автомобиля, принимаемый в пределах от 0 до 0,7 рад. Пользуясь уравнением (2.7) проводится расчет критической скорости при различных углах поворота управляемых колес для заданных jy и f. Результаты расчета сводятся в табл. 2.6 и по этим результатам строится график зависимости Vупр от Ө (рис.2.4). Таблица 2.6 - Результаты расчёта
Одним из показателей управляемости является характеристика статической траекторной управляемости, представляющая собой зависимость радиуса поворота от скорости движения автомобиля с учетом эластичности шин. Радиус поворота автомобиля при наличии увода определяют по выражению:
где d1 ,d2 – углы увода колёс соответственно передней и задней осей, рад.
где Py 1 и Py 2 – боковые силы, действующие на колёса соответственно передней и задней осей; Kd 1 и Kd 2 – коэффициенты сопротивления уводу одного колеса соответственно передней и задней осей, кН/рад.
Рис. 2.4 – График зависимости критической скорости по управляемости от угла поворота управляемых колес
Средние значения для одного колеса легковых автомобилей составляют от 30 до 60 кН/рад, грузовых – 50- 200 кН/рад (для ряда отечественных автомобилей ориентировочные значения приведены в приложении 1). Принимая значения для одного колеса передней и задней осей, следует учитывать давление воздуха в шинах. Если давление воздуха одинаково для колес передней и задней оси, то можно принимать значения Kd 1 и Kd 2 одинаковыми, если давление воздуха разное, то следует принимать большие значения Kd для шин имеющих большее давление, соответственно меньшие (на 2-4 кН/рад) - для шин с меньшим давлением. Значения боковых сил зависят от скорости автомобиля, радиуса поворота, массы и расположения центра тяжести. При расчетах удобно пользоваться постоянным радиусом поворота равным 50 метров. Изменяя скорость движения в диапазоне от 0 до 15 м/с определяются действующие боковые силы По формуле 2.8 определяются значения эквивалентного радиуса По результатам расчетов проводят сопоставление радиусов R и R Для автомобиля с избыточной поворачиваемостью существует понятие критической скорости по условию увода колес осей, которая определяется по формуле:
где:
Рис.2.5 График зависимости типов поворачиваемости автомобиля
У автомобилей с нейтральной и недостаточной поворачиваемостью понятие критической скорости отсутствует. Дополнительное задание: Определить тип поворачиваемости и критическую скорость по управлению при угле поворота управляемых колес 0,1 рад, а также максимальный угол поворота внешнего управляемого колеса
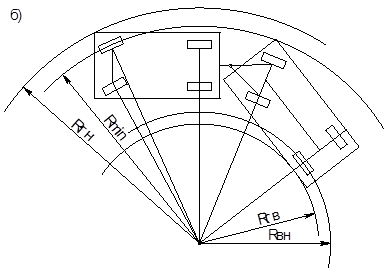
Маневренность. Одним из основных показателей маневренности является габаритная полоса движения – полоса, занимаемая автомобилем при движении. Наибольшую полосу будет занимать автомобиль при выполнении поворота с минимально возможным радиусом R На криволинейных участках дорог:
ГПД = Rн – Rвн, (2.11)
где Rн – наружный, габаритный радиус, либо принимается по исходным данным, либо рассчитывается по формуле (6.2):
где L – база автомобиля, м (из исходных данных); L1 – передний свес, м (из исходных данных);
Рис. 2.6. Показатели маневренности автопоездов при круговом движении.
Rвн – внутренний, габаритный радиус, определяется по формуле (6.4), м:
Задаваясь значениями угла поворота внешнего управляемого колеса от 0,1 до
Таблица 2.6 – Показатели расчета
Дополнительное задание: Определить максимальную величину ГПД и рассчитать, на сколько процентов она превышает габаритную ширину автомобиля.
Проходимость. В данном разделе, пользуясь известными геометрическими характеристиками автомобиля (из исходных данных) необходимо рассчитать продольный R
Рис. 2.6 Схема, иллюстрирующая понятие радиусов проходимости и способ их определения Расчет R
При этом следует учитывать, что А R Дополнительное задание: Рассчитать коэффициент сцепного веса
Плавность хода
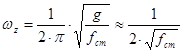
Основной оценочный показатель плавности хода – частота свободных колебаний подрессоренных и неподрессоренных масс, а также вынужденных колебаний. Частоты свободных колебаний, Гц подрессоренных масс определяют по зависимости:
где wz – частота свободных колебаний, Гц; fст – статический прогиб подвески, м.
fст = G /C, (2.16) где G – статическая весовая нагрузка на подвеску данной оси, Н; C – суммарная жёсткость подвески данной оси, Н/м (для ряда отечественных автомобилей ориентировочные значения приведены в приложении 1). Плавность хода легковых автомобилей считается удовлетворительной при wz = 0,8-1,2 Гц, грузовых при wz = 1,2-1,8 Гц. Частота свободных колебаний неподрессоренных масс (мостов автомобиля), совершающих высокочастотные колебания, обусловлена жёсткостью шин, Гц.
где
mм – масса моста, кг. Принимают: mм1 = 0,1× ma; mм 2 = 0,15× ma, где mм1 и mм2 – масса соответственно переднего и заднего мостов; ma – собственная масса автомобиля. Помимо свободных, автомобиль совершает и вынужденные колебания, вызываемые неровностями дороги. Частота этих колебаний, Гц, определяется из выражения: ωвын = Va /S, (2.18) где Va – скорость автомобиля, м/с; S – длина волн неровностей, м. На дорогах с твёрдым покрытием S = 0,5÷5 м.
Рис.2.7 – Зависимость резонансных скоростей от длины неровностей. Используя зависимость Va = w× S, строится зависимость резонансных скоростей автомобиля от длины неровностей V = f(S) для частот собственных колебаний подрессоренных и неподрессоренных масс (рис. 7.1).
Дополнительное задание: Определить скорости, при которых наступают резонансные колебания при длине неровностей 1 м, а также определить длину неровностей, при которой наступают резонансные колебания при скорости АТС 4 м/с.
Приложение 1 Ориентировочные величины некоторых параметров отечественных автомобилей, используемых при выполнении курсовой работы
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-18; просмотров: 7033; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.222.184.162 (0.227 с.) |
 кВт;
кВт; 1/сек;
1/сек; Нм;
Нм; 1/сек;
1/сек; 0,328 м;
0,328 м; ,
,  ,
,  ,
,  ,
,  ;
; ;
; ;
; ;
; ;
; ;
; ;
; ;
; ;
; ;
; ;
; м;
м; = 0,28 м;
= 0,28 м; м;
м; м;
м; 0,57 м;
0,57 м; кг/л;
кг/л; ;
; ;
; ;
; ;
; ;
; ;
; , а остальные из приложения 1 или по согласованию с преподавателем.
, а остальные из приложения 1 или по согласованию с преподавателем. , (1.9)
, (1.9) - сила тяги или окружная сила на ведущих колесах, Н;
- сила тяги или окружная сила на ведущих колесах, Н; - сила сопротивления качению, Н;
- сила сопротивления качению, Н; - сила сопротивления подъему, Н;
- сила сопротивления подъему, Н; - сила сопротивления воздуха, Н;
- сила сопротивления воздуха, Н; - сила сопротивления разгону, Н;
- сила сопротивления разгону, Н; , (1.10)
, (1.10) , учитывающий реальные условия эксплуатации (для легковых автомобилей принимают 0,9; для грузовых двухосных - 0,88; для многоосных – 0,85; для автобусов – 0,83), Нм;
, учитывающий реальные условия эксплуатации (для легковых автомобилей принимают 0,9; для грузовых двухосных - 0,88; для многоосных – 0,85; для автобусов – 0,83), Нм; = 0,5d +
= 0,5d +  В
В 
 , (1.14)
, (1.14) .
. .
. , (1.17)
, (1.17) tq
tq  - это сила его инерции:
- это сила его инерции: m
m  dv/dt, (1.23)
dv/dt, (1.23) uкп
uкп  + 1 (1.24)
+ 1 (1.24) .
.











 ,
,  (2.5)
(2.5)
 и коэффициент поперечной устойчивости
и коэффициент поперечной устойчивости  для порожнего и полностью груженого автомобиля.
для порожнего и полностью груженого автомобиля. , (2.6)
, (2.6) , (2.7)
, (2.7) , (2.8)
, (2.8) ;
;  , (2.9)
, (2.9)
 , а затем величина бокового увода передней и задней осей
, а затем величина бокового увода передней и задней осей  .
. и строится график зависимости
и строится график зависимости  , с целью выявления типа поворачиваемости автомобиля. При R = R
, с целью выявления типа поворачиваемости автомобиля. При R = R  R
R  R
R  , (2.10)
, (2.10) - масса приходящаяся соответственно на переднюю и заднюю оси.
- масса приходящаяся соответственно на переднюю и заднюю оси.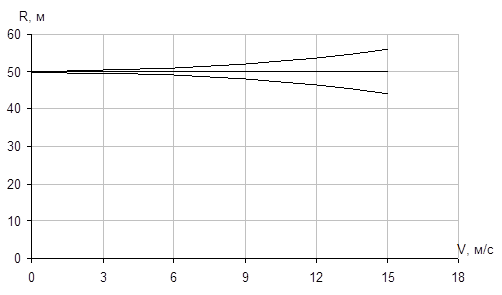
 п.
п. , измеряемым по следу внешнего управляемого колеса (исходные данные), рис. 2.6.
, измеряемым по следу внешнего управляемого колеса (исходные данные), рис. 2.6. , м (2.12)
, м (2.12) , м
, м  (2.13)
(2.13)
 , м. (2.14)
, м. (2.14) и поперечный R
и поперечный R  радиусы проходимости (см. рис. 2.6), а также определить передний
радиусы проходимости (см. рис. 2.6), а также определить передний  и задний углы свеса
и задний углы свеса  , передний L
, передний L 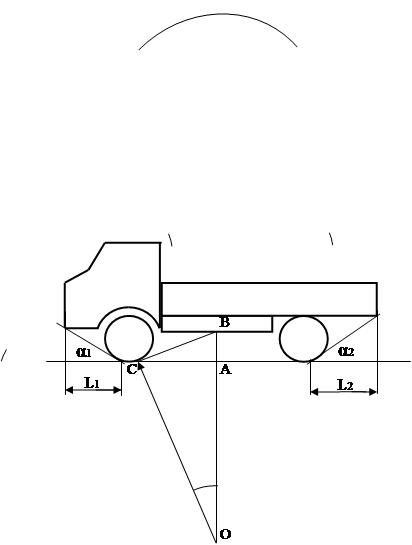


 .
. , (2.15)
, (2.15) , (2.17)
, (2.17) – суммарная жёсткость шин данной оси, Н/м (для ряда отечественных автомобилей ориентировочные значения приведены в приложении 1);
– суммарная жёсткость шин данной оси, Н/м (для ряда отечественных автомобилей ориентировочные значения приведены в приложении 1); - суммарная жесткость упругих элементов подвески оси;
- суммарная жесткость упругих элементов подвески оси;



