
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Назначение и типы манометрических датчиков давленияСодержание книги
Поиск на нашем сайте
СОДЕРЖАНИЕ 1. Лабораторная работа № 1. Исследование датчиков давления. 1.1. Цель работы……………………………………………………. 1.2. Краткая теоретическая часть…………………………………. 1.2.1. Назначение и типы манометрических датчиков давления.. 1.2.2. Потенциометрические датчики давления…………………. 1.2.3. Индуктивные датчики давления…………………………… 1.2.4. Погрешности датчиков давления…………………………... 1.3. Описание лабораторной установки………………………….. 1.4. Порядок выполнения работы………………………………… 1.5. Содержание отчета…………………………………………… 1.6. Контрольные вопросы……………………………………….. Список литературы………………………………………………... 2. Лабораторная работа № 2. Исследования приборов для измерения скорости вращения. 2.1. Цель работы…………………………………………………… 2.2. Краткая теоретическая часть ………………………………… 2.2.1. Назначение и типы тахометров……………………………. 2.2.2. Принцип работы магнитоиндукционного тахометра…….. 2.2.3. Состав и конструкция магнитоиндукционного тахометра. 2.3. Описание лабораторной установки…………………………. 2.4. Задание………………………………………………………… 2.5. Порядок выполнения работы………………………………… 2.6. Содержание отчета……………………………………………. 2.7. Контрольные вопросы………………………………………… Список литературы 3. Лабораторная работа №3. Исследование приборов для измерения количества и расхода топлива……………. 3.1. Цель работы…………………………………………….. 3.2. Краткая теоретическая часть……………………. 3.2.1. Назначение системы измерения запаса и расхода топлива. 3.2.2. Принцип работы емкостного топливомера…………… 3.2.3. Измерительные схемы емкостного топливомера…… 3.3. Описание лабораторной установки……………………….. 3.4. Задание……………………………………………………… 3.5. Порядок выполнения работы……………………………… 3.6. Содержание отчета……………………………………… 3.7. Контрольные вопросы…………………………… Список литературы………………………………….. 4. Лабораторная работа № 4. Исследования приборов для измерения высоты, скорости и числа М 4.1. Цель работы…………………………………………... 4.2. Краткая теоретическая часть 4.2.1. Барометрический метод измерения высоты……… 4.2.2. Аэрометрический метод измерения скорости и числа М.……………………………………………... 4.3. Описание лабораторной установки…………………. 4.4. Задание………………………………………………... 4.5. Порядок выполнения работы………………………... 4.6. Содержание отчета…………………………………… 4.7. Контрольные вопросы……………………………….. Список литературы……………………………………….. Приложение……………………………………………….
ЛАБОРАТОРНАЯ РАБОТА №1 ИССЛЕДОВАНИЕ ДАТЧИКОВ ДАВЛЕНИЯ. Цель работы Изучение принципов построения датчиков давления, исследование статических характеристик. Краткая теоретическая часть
Назначение и типы манометрических датчиков давления
Дифференциальные манометры используются для измерения избыточных давлений жидкостей и газов в различных отсеках авиационных двигателей (в топливной системе, системе смазки и т.д.). Манометры абсолютного давления (моновакууметры) применяются для измерения давления во всасывающих системах. Манометры отношения давлений служат для контроля степени сжатия газов в различных ступенях газотурбинных двигателей. Помимо манометров со стрелочной индикацией, на летательных аппаратах широко применяются сигнализаторы и датчики давлений. Сигнализаторы давлений включают электрический сигнал при выходе измеряемого давления за допустимые для нормальной работы двигателя пределы. Датчик давления выдает электрический сигнал, пропорциональный измеряемому давлению и используемый для автоматического управления системами ЛА или для дальнейшей передачи на указатели в дистанционных манометрах. По методам измерения давления манометры можно разделить на следующие группы: - механические (недистанционные), в том числе жидкостные, весовые и пружинные. - электромеханические, в которых механический чувствительный элемент сочетается с электрической дистанционной передачей. - электрические, в том числе электронные, газоразрядные, радиоактивные, тепловые пьезорезисторные. При использовании чисто механических манометров давление должно подводиться с помощью трубопроводов непосредственно к приборной доске самолета. Наличие трубопроводов снижает эксплуатационную надежность системы (из-за возможной разгерметизации системы в случае поломки трубопровода) и приводит к запаздыванию показаний при измерении давления. Именно этот фактор обуславливает бесперспективность развития недистанционных манометров. От этих недостатков избавлены дистанционные электромеханические манометры, в которых датчик, содержащий механический чувствительный элемент с электрическим преобразователем, устанавливается непосредственно у объекта измерений. При этом электрические сигналы, снимаемые с датчика, передаются по электропроводам и воспринимаются расположенным на приборной доске электроизмерительным прибором или используется в системах автоматического регулирования.
Если принять
то отношение токов
Следовательно, соотношение (1.14) и является условием температурной компенсации. Подставив в выражение (1.12) значения коэффициентов A1, В1, A2 и B2, можно определить необходимую для компенсации величину сопротивления медной катушки R30. Полная компенсация температурной ошибки может быть достигнута только при определении значений сопротивлений RX и RY. При других значениях RX и RY появится температурная ошибка, но эта ошибка значительно меньше той, которая была бы при отсутствии компенсации. При R1 = R2 и RX = RY, благодаря симметрии схемы, температурная ошибка равна нулю даже без компенсации. Поэтому при расчете сопротивлений Rзо условие полной компенсации целесообразно брать для значений RX и RY, соответствующих положению щетки на расстоянии приблизительно 20-30% от края потенциометра. Порядок выполнения работы
1. Изучить принцип работы и конструкцию потенциометрического и индуктивного датчиков давления. 2. Создать давление в ресивере. 3. Установить переключатель в соответствующее положение, снять зависимость выходного сигнала каждого датчика от величины входного давления.
4. Измерения произвести для десяти значений входного давления. Данные занести в таблицу 1.
Таблица 1
По полученным данным построить графики зависимости Определить погрешности датчиков давления и сравнить полученные результаты. Содержание отчета
1. Цель работы; 2. Схему установки; 3. Результаты измерений, сведенные в таблицу; 4. Графики, построенные по результатам измерений; 5. Вывод. 1.6. Контрольные вопросы 1. Принцип действия потенциометрического датчика давления. 2. Принцип действия индуктивного датчика давления. 3. Погрешности исследуемых датчиков давления и методы их уменьшения. 4. Конструкция датчиков давления. 5. Перечислите погрешности манометров с потенциометрическими датчиками. 6. Перечислите погрешности манометров с индуктивными датчиками. 7. Методы устранения погрешностей манометров различного типа. Литература 1. Боднер В.А. “Приборы первичной информации”. М. Машиностроение, 1981 г. 2. Дорофеев С.С. Авиационные приборы. М.: Воениздат, 1992 г. 3. Панфилов Д.И. Иванов В.С. Датчики фирмы “ Motorola”. М.: Додэка, 2000 г. 4. Уолт Кестер. Учебник фирмы Analog Devices. / Перевод с английского - Горшков Б.Л., Санкт-Петербург: Автекс, 1998 г., электронная версия.
ЛАБОРАТОРНАЯ РАБОТА № 2 Цель работы
Целью лабораторной работы являются изучение принципов работы электрических тахометров, ознакомление с конструкцией, экспериментальное определение характеристик.
Краткая теоретическая часть
2.2.1. Назначение и типы тахометров
Прибор, предназначенный для измерения частоты вращения, называется тахометром. В авиации тахометры применяются для измерения частоты вращения силовых агрегатов, а также вала двигателя. Частота вращения вала силовой установки летательного аппарата является важнейшим параметром, по которому судят о тяге или мощности двигателя, о динамической и тепловой напряженностях. Наибольшее распространение получили следующие методы измерения частоты вращения по принципу действия чувствительного элемента (ЧЭ): – центробежные, в которых ЧЭ реагирует на центробежную силу, развиваемую неуравновешенными массами при вращении вала; – магнитоиндукционные, основанные на зависимости наводимых в металлическом теле вихревых токов от частоты вращения; – электрические постоянного, переменного или импульсного тока, основанные на зависимости генерируемого напряжения от частоты вращения; – фотоэлектрические, основанные на модуляции светового потока вращающимися элементами и др. Магнитоиндукционные, тахометры нашли наиболее широкое применение в современной авиации.
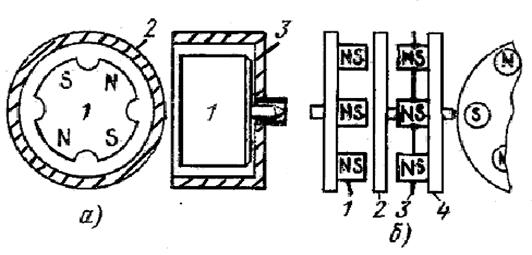
2.2.2. Принцип работы магнитоиндукционного тахометра Принцип действия магнитоиндукционных тахометров основан на явлении наведения вихревых токов в металлическом теле вращающемся в магнитном поле (или в неподвижном теле, находящемся во вращающемся магнитном поле). Магнитоиндукционные тахометры бывают двух типов: с цилиндрическим ЧЭ (рис. 2.1 а) и с дисковым ЧЭ (рис. 2.1 б).
Рис. 2.1 а – тахометр с полым цилиндром; б – тахометр с диском; 1 – магнит; 2 – чувствительный элемент; 3 – термомагнитный шунт; 4 – магнитопровод.
Индукционные тахогенераторы редко применяются как измерительные приборы вследствие больших погрешностей, но они незаменимы в качестве датчиков угловой скорости в системах автоматики.
Рис. 2.2 Кинематические схемы магнитоиндукционных тахометров: а – с полым цилиндром; б – с диском; 1 – чувствительный элемент; 2 –магнит; 3 – магнитопровод.
К ним относятся магнитоиндукционные тахометры, которые бывают двух типов: с чувствительным элементом в виде тонкостенного электропроводящего полого цилиндра 1 (рис. 2.2 а), помещенного в зазоре между вращаемым магнитом 2 и магнитопроводом 3, или с чувствительным элементом в виде диска 1 (рис. 2.2 б), помещенного в зазоре между вращаемыми цилиндрическими магнитами 2. Обычно постоянные магниты вращаются с частотой, пропорциональной измеряемой частоте вращения вала двигателя, а чувствительные элементы (цилиндры и диски) закреплены на самостоятельных осях и могут поворачиваться лишь на некоторый угол, ограниченный спиральной противодействующей пружиной П. При вращении магнитной системы в теле чувствительного элемента (ЧЭ) за счет магнитной индукции наводится ЭДС, прямо пропорциональная скорости вращения магнита:
где k1 – коэффициент, зависящий от индукции магнитного потока, пронизывающего ЧЭ; пm – угловая скорость вращения магнита. ЭДС, индуцированная в ЧЭ, вызывает появление в нем индукционных токов i, величина которых зависит от ЭДС, вызвавшей их, числа пар полюсов магнита, размеров и материалов ЧЭ. Индукционные токи, в свою очередь, создают магнитное поле. В результате взаимодействия магнитных полей ЧЭ и постоянных магнитов возникает вращающий момент, стремящийся повернуть ЧЭ вслед за вращающимся магнитом. Вращающий момент, действующий на элемент, пропорционален величине индуцированного в нем вихревого тока, а следовательно, и скорости вращения магнита:
где k2 – постоянный коэффициент пропорциональности. Под действием вращающего момента ЧЭ поворачивается и закручивает пружину П, создающую противодействующий момент, пропорциональный углу закручивания пружины:
где с – жесткость пружины; a – угол закручивания пружины. На одной оси с ЧЭ укреплена стрелка, угол отклонения которой пропорционален угловой скорости вращения постоянного магнита. Угол поворота стрелки прибора определяется равенством моментов откуда
где
2.2.3. Состав и конструкция магнитоиндукционного тахометра
На самолетах и вертолетах находят применение магнитоиндукционные тахометры типа ТЭ (ТЭ-15, 2ТЭ-15-1, ТЭ-5-2М и др.) со шкалой, отградуированной в оборотах в минуту, и типа ИТЭ (ИТЭ-1, ИТЭ-2 и др.) со шкалой, отградуированной в процентах. Разница в устройстве их незначительна. В комплекты тахометров этого типа могут входить один – два датчика и один показывающий прибор, либо один датчик и один – два указателя. В частности, комплект тахометра может состоять из одного датчика ДТЭ-1 и одного показывающего прибора ИТЭ-1. Соответственно датчик ДТЭ-2, Д-3М или Д-3-2 должен работать в системе измерения оборотов совместно с двумя измерителями типа ИТЭ-1 (ИТЭ-1Т) или с показывающим прибором ИТЭ-2 (ИТЭ-2Т), объединяющим в одном корпусе две измерительные системы. Конструкция датчика Д-3-2 представлена на рис. 2.3.
Рис. 2.3 Датчик магнитоиндукционного тахометра Д-3-2: 1 – хвостовик; 2, 6 –крышки; 3, 7 – шарикоподшипники; 4 – ротор; 5 – статор; 8 – болт.
Датчик представляет собой трехфазный генератор переменного тока с четырехполюсным постоянным магнитом – ротором 4. Ротор напрессован на валу, заканчивающемся квадратным хвостовиком 1, которым вал генератора соединяется с приводом вала авиадвигателя. Эта передача обладает достаточной гибкостью и компенсирует скручивающие колебания и перекосы, которые могут возникнуть при монтаже датчика. Ротор вращается в шарикоподшипниках 3 и 7, которые установлены в крышках 2 и 6. Статор 5 датчика набран из пластин электротехнической стали. В целях уменьшения потерь в статоре от вихревых токов пластины изолированы одна от другой клеем. Обмотка статора – четырехполюсная, трехфазная, выполненная из медного провода. Фазовые обмотки соединены звездой. Магнитоиндукционный тахометр является дистанционным прибором. Синхронная дистанционная передача состоит из трехфазного генератора переменного тока (датчика), расположенного на авиадвигателе, трехпроводной линии и синхронного двигателя, размещенного в указателе.
Рис. 2.4 Электрокинематическая схема тахометра: 1 – плата с магнитами; 2 – диск демпфера; 3 – пружина; 4 – диск; 5 термомагнитный шунт; 6 – постоянные магниты; 7 – пружина; 8 – крестообразный магнит; 9 – гистерезисные диски; 10 – обмотка двигателя; 11 – дисковая плата; 12 – ось; 13 – шала; 14 – стрелка; 15 – якорь; 16 – обмотка статора.
Рис. 2.5 Кинематическая схема показывающего прибора тахосигнальной аппаратуры.
Рис. 2.6 Показывающий прибор тахометра ИТЭ – 1: 1 – плата с магнитами; 2 – диск демпфера; 3 – пружина; 4 – диск; 5 – термомагнитный шунт; 6 – постоянные магниты; 7 – пружина; 8 – крестообразный магнит; 9 – гистерезисные диски; 10 – обмотка двигателя; 11 – дисковая плата; 12 – ось; 13 – шкала; 14 –стрелка. Совместное рассмотрение рисунков 2.4 – 2.6 позволяет изучить конструкцию показывающего прибора и работу комплекта магнитоиндукционного тахометра типа ИТЭ. Показывающий прибор включает в себя два узла, смонтированные в одном корпусе, синхронный двигатель и измерительную систему (тахометр). Синхронный двигатель состоит из статора с трехфазной обмоткой 10 и ротора, собранного из двух крестообразных магнитов 5 и трех гистерезисных дисков 9. Постоянные крестообразные магниты насажены на вал свободно и могут поворачиваться относительно вала на некоторый угол, так как соединяются с ним пружиной 7, через которую передают крутящий момент на вал синхронного двигателя. Это обеспечивает вхождение двигателя в синхронизм до того, как он разовьет полную мощность. Гистерезисные диски 9 изготовляются из магнитотвердого материала. В синхронном режиме работы диски взаимодействуют с вращающимся полем так же,как и постоянные магниты, но с меньшей силой взаимодействия. Измерительная часть прибора состоит из магнитного узла с двумя дисковыми платами 11 с впрессованными в них шестью парами постоянных магнитов 6. На магниты надет термомагнитный шунт 5, предназначенный для компенсации температурной погрешности. Шунт выполнен из сплава, магнитная проницаемость которого с возрастанием температуры уменьшается. В воздушном зазоре между торцами противоположных полюсов магнитов расположен чувствительный элемент – диск 4, изготовленный из медно-марганцевого сплава с малым температурным коэффициентом. Таким образом, магнитный узел укреплен на конце вала синхронного двигателя и вращается с синхронной скоростью, а чувствительный элемент – диск связан, через ось 12 со стрелкой 14, перемещающейся по шкале 13. Для уменьшения колебаний стрелки около установившегося положения в конструкции прибора предусмотрен демпфер, по устройству аналогичный измерительному узлу 11. Платы 1 магнитного демпфера закреплены неподвижно. Между торцами шести пар неподвижных магнитов находится алюминиевый диск 2 демпфера, связанный с осью измерительного узла. Взаимодействие наводимых в алюминиевом диске вихревых токов с магнитным потоком магнитов приводит к превращению энергии колебаний в тепловую и к повышению устойчивости стрелки прибора. Тахометр ИТЭ-1 работает следующим образом. Напряжение статорной обмотки 16 генератора датчика с частотой, пропорциональной частоте вращения ротора авиадвигателя, возбуждает в статорной обмотке 10 синхронного двигателя показывающего прибора вращающееся магнитное поле, которое приводит к намагничиванию гистерезисных дисков двигателя. Гистерезисные диски выполнены из ферромагнитного материала с большой коэрцитивной силой, поэтому создаваемое ими магнитное поле из-за большого гистерезиса отстает на некоторый угол от намагничивающего поля статора. В результате возникает вращающий момент дисков ротора двигателя, направление которого совпадает с направлением вращающегося поля статорных обмоток. При частоте вращения ротора, близкой к синхронной, когда обороты ротора и поля статора становятся одинаковыми, постоянные магниты 8 успевают взаимодействовать с полем статора, входят в синхронизм и, постепенно закручивая пружину 7, начинают воспринимать полную нагрузку. В синхронном режиме работы двигателя основной вращающий момент создается в результате взаимодействия поля постоянных магнитов с вращающимся полем статора, а гистерезисные диски создают лишь незначительный дополнительный момент. При резких увеличениях частоты вращения авиадвигателя, следовательно, и скорости вращения магнитного поля статора возможен переход двигателя в асинхронный режим работы. В этом случае полюсы постоянных магнитов вращаются с некоторым отставанием от полюсов поля статора. Гистерезисные диски помогают ротору следовать за магнитным полем статора и вводят постоянные магниты ротора в синхронную работу. Ротор двигателя вращает магнитную систему 11 измерительного узла. В результате взаимодействия полей магнитов 6 и диска 4 чувствительный элемент (диск) с закрепленной на его оси стрелкой 14 поворачивается и закручивает противодействующую пружину 5. Таким образом, угол поворота диска пропорционален значению измеряемой частоты вращения. Демпфер, укрепленный на оси чувствительного элемента, успокаивает подвижную систему и облегчает снятие показаний стрелки указателя. Указатели ИТЭ-2 предназначены для измерения частоты вращения валов двух двигателей или двух ступеней компрессора одного двигателя. В корпусе указателя ИТЭ-2 размещены два измерительных узла, аналогичные рассмотренным, движение которых передается на две соосные стрелки. Магнитоиндукционный демпфер в них отсутствует. Демпфирование колебаний осуществляется за счет моментов трения зубчатых передач. К магнитоиндукционным тахометрам относится и тахометрическая сигнальная аппаратура (ТСА), которая может обеспечивать либо только выдачу дискретных сигналов соответствующих определенным частотам вращения вала (ТСА-12), либо выдачу дискретных сигналов и индикацию частоты вращения вала (ТСА-6). Конструкция показывающих приборов ТСА аналогична конструкции ИТЭ-1 (рис. 10). Отличие заключается лишь в наличии сигнального устройства, которое состоит из осветителей Л1, Л4 и фоторезисторов B1, B4, разделенных между собой профилированным диском. Диск укреплен на оси измерительного узла. При изменении скорости вращения профильный диск поворачивается, в результате меняется степень освещенности тех или иных фоторезисторов, включенных в схему управления, и тахометр выдает сигналы, соответствующие определенным частотам вращения, на исполнительные устройства. Шкала показывающего прибора ИТЭ отградуирована в процентах, измерительный предел – (0…110) %, цена деления – 1 %, погрешность измерения не превышает ±0,5 % в рабочем диапазоне шкалы от 60 до 100% и 1% - в остальном диапазоне. Основная погрешность выдачи дискретных сигналов ТСА не превышает ±2 %. Датчики магнитоиндукционных тахометров не имеют методической погрешности. Основная инструментальная погрешность указателя тахометра определяется трением в подшипниках и ошибками градуировки шкалы. Дополнительные погрешности обусловлены прежде всего влиянием температуры и вызываются изменением электрического сопротивления чувствительного элемента, магнитной проводимости магнитопроводов и упругих свойств противодействующей пружины. Конструктивная погрешность из-за изменения температуры окружающей среды частично компенсируется подбором материалов деталей. В частности, чувствительный элемент - диск изготовляется из марганцовистой меди (96,1 % Сu, 3,9 % Мn) с положительным температурным коэффициентом. Противодействующая пружина из фосфористой бронзы и магниты из соответствующих сплавов имеют отрицательные температурные коэффициенты. Для компенсации остаточной температурной погрешности применяется температурный шунт 5, надетый на магниты 6. Шунт выполнен из сплава, магнитная проницаемость которого с возрастанием температуры уменьшается. Действие шунта заключается в следующем. С увеличением температуры окружающей среды увеличивается сопротивление токопроводящего диска 4 и уменьшается сила наведенного тока. Одновременно с этим уменьшается магнитная проницаемость шунта, который меньшую часть магнитного потока пропускает через себя, вследствие чего увеличивается магнитная индукция в зазоре измерительного магнитного узла. При этом сила взаимодействия постоянных магнитов 6 и токов в диске 4, аследовательно, и движущий момент практически остаются неизменными.
Задание 1. Изучить принцип действия электрических тахометров. 2. Исследовать характеристики тахогенератора.
Порядок выполнения работы 1. Установить тумблеры в соответствующие положения, подать напряжение питания на стенд. 2. Подключить поочередно каждый из датчиков тахогенератора, изменяя скорость вращения приводного электродвигателя, убедиться в работоспособности тахогенераторов и указателя. 3. Для каждого тахогенератора снять зависимость амплитуды выходного напряжения от числа оборотов в10 точках
4. Для каждого тахогенератора снять зависимость частоты выходного напряжения от числа оборотов
5. Данные свести в таблицу. Таблица 2.1
6. Построить график зависимости
Содержание отчета
Отчет должен содержать: а) цель работы; б) схему установки; в) результаты измерений, сведенные в таблицу; г) графики, построенные по результатам измерений; д) вывод.
2.7. Контрольные вопросы
1. Объяснить принцип действия магнитоиндукционного тахометра. 2. Какими факторами объясняются основные погрешности магнитоиндукционных тахометров. 3. Методы уменьшения погрешностей тахометров. Список литературы 1. В. А. Боднер. «Приборы первичной информации»: Машиностроение, 1981. 2. С. С. Дорофеев. «Авиационные приборы»: Москва, 1992. 3. http://www.krugosvet.ru 4. http://www.airwar.ru/bleo ЛАБОРАТОРНАЯ РАБОТА №3 Цель работы Целью работы является изучение принципов работы емкостного топливомера.
Краткая теоретическая часть
3.2.1. Назначение системы измерения запаса и расхода топлива
Приборы, измеряющие объемное или весовое количество топлива в баках, называются топливомерами. Они позволяют экипажу самолета в любой момент полета определить, сколько топлива имеется в баках, и оценить время, в течение которого можно продолжать полет. Непосредственное измерение объема (веса) топлива на борту самолета неосуществимо, поэтому применяются косвенные методы измерения, в которых объем (вес) топлива функционально связан с какой-либо легко определяемой величиной. В качестве таких величин выбирают уровень или вес столба топлива в баке. С помощью топливомеров определяют суммарный запас топлива во всех баках и количество топлива в каждом из них в отдельности. Необходимо знать, как распределено топливо между баками, для того чтобы определить правильную последовательность расходования топлива из баков во избежание недопустимого смещения центра масс самолета. Переключением баков управляют автоматические устройства топливомеров. Большинство методов измерения количества топлива сводится к измерению его уровня (высоты столба жидкости). Однако шкалы указателей топливомеров градуируют в единицах объема (литрах) или в килограммах. Поэтому тарировка шкалы зависит от размеров и формы топливного бака, для которого предназначен прибор. Существуют следующие методы измерения количества топлива: − поплавковый, основанный на измерении положения поплавка, плавающего на поверхности жидкости; − емкостной, при котором электрическая емкость специального конденсатора, установленного в баке, зависит от уровня жидкости; − манометрический, при котором измеряется давление столба жидкости в баке; − радиационный, основанный на измерении интенсивности ядерного излучения, зависящего от уровня жидкости; − радиочастотный, основанный на зависимости от уровня жидкости параметров отрезков длинных линий; − ультраакустический, основанный на измерении уровня по отражению ультразвука от границ раздела сред и др. На современных летательных аппаратах наибольшее распространение получили два основных топливомера, работающих по первым двум методам.
3.2.2. Принцип работы емкостного топливомера
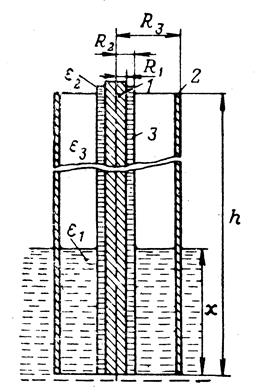
Принцип действия емкостного топливомера основан на зависимости величины емкости специального конденсатора от уровня топлива в баке. Чувствительный элемент емкостного топливомера (рис. 3.1) представляет собой цилиндрический конденсатор с внутренним электродом 1,внешним 2 и изоляционным слоем 3. Между изоляционным слоем и внешним электродом находится слой жидкости (топливо, кислота), уровень которой необходимо измерить. Если уровень жидкости в баке изменяется, то будет изменяться и емкость конденсатора вследствие того, что диэлектрические постоянные жидкости и воздуха различны. В большинстве случаев внешний электрод цилиндрического конденсатора должен быть выполнен отдельно, однако не исключено использование в качестве внешнего электрода стенок бака, особенно в высоких и узких баках. Это тем более целесообразно, что в таком случае конденсатор позволяет измерять количество топлива в баке без заметных погрешностей при достаточно больших кренах самолета и ускорениях. Емкостные топливомеры применяются для измерения количества всех видов топлива, но оказываются почти незаменимы в случае
Рис. 3.1.Схема чувствительного элемента емкостного топливомера: 1 – внутренний электрод; 2 – внешний электрод; 3 – изоляционный слой.
измерения количества химически активных жидкостей, применяемых в качестве горючих компонентов в жидкостно-реактивных двигателях. В этом случае внутреннюю трубку конденсатора датчика покрывают тонким электроизоляционным слоем. Материал для внешней трубки также следует выбирать с учетом свойств жидкости, уровень которой нужно измерять. Существенным преимуществом емкостных топливомеров по сравнению с поплавковыми является отсутствие в датчике подвижных частей, кроме того, в этих приборах погрешности при кренах и ускорениях самолета меньше, чем в поплавковых. Для вывода зависимости между уровнем топлива в баке и емкостью датчика введем следующие обозначения (см. рис. 3.1): e1, e2, e3 – диэлектрические постоянные жидкости, материала изолятора и смеси паров жидкости и воздуха соответственно; R 1, R 2, R 3 – радиусы внутреннего электрода, изолятора и внешнего электрода; х – уровень жидкости; h – полная высота датчика. Вследствие наличия изоляционного слоя имеется возможность измерять уровень полупроводящих (вода, кислота и др.) жидкостей. В качестве изолятора можно использовать стекло, резину или другой материал в зависимости от природы жидкости. При измерении уровня непроводящих жидкостей (керосин, бензин) изоляционный слой не применяют. Если пренебречь концевым эффектом, то можно принять, что емкость нижней части цилиндрического конденсатора будет
Подобно этому емкость верхней части конденсатора найдем из соотношения
Суммируя емкости Сх и Ch, получим полную емкость конденсатора:
Из этого выражения следует, что емкость конденсатора является линейной функцией уровня жидкости х. Таким образом, измерение уровня жидкости можно свести к измерению емкости конденсатора С. Чувствительность емкостного датчика определяется выражением
Легко видеть, что наибольшая чувствительность будет в том случае, когда R 2/ R 1 стремится к 1, т. е. когда слой изоляции отсутствует. При этом получим:
Так как диэлектрическая постоянная полупроводящих жидкостей значительно больше, чем непроводящих, то изменение емкости на единицу длины в первом случае будет больше, чем во втором. Отсюда следует, что емкостный метод измерения уровня особенно эффективен для полупроводящих жидкостей. Из выражения (3.5) следует, что для увеличения чувствительности величину R 3/ R 2 нет необходимости брать большой. Если величина R 3− R 2 мала, то на точность показаний прибора значительное влияние будет оказывать вязкость жидкости. Следовательно, слой жидкости между электродами должен быть таким, чтобы вязкость не оказывала влияния на уровень жидкости. Обычно ограничиваются зазором R 3− R 2=l,5-6 мм, а для увеличения чувствительности датчик собирают из нескольких концентрических труб, образующих параллельно соединенные конденсаторы. Следует отметить, что в емкостном топливомере можно полностью скомпенсировать методические погрешности, возникающие от наклона бака при крене и ускорениях. Действительно, для этого достаточно вместо одного чувствительного элемента установить по краям бака четыре элемента. При параллельном соединении емкостей чувствительных элементов общая емкость их будет оставаться почти постоянной при любых наклонах бака. Емкостные топливомеры, не входящие в топливомерно-расходомерные системы, имеют различные модификации (СЭТС, СПУТ, СУИТ, ТАЦ) и выполняют следующие функции: – измеряют количество топлива в группах баков и суммарное количество топлива на самолете; – управляют выработкой топли
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-09-13; просмотров: 754; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.222.91.173 (0.012 с.) |

 (1.13)
(1.13) не будет зависеть от окружающей температуры, т.е.
не будет зависеть от окружающей температуры, т.е. (1.14)
(1.14)


 (2.1)
(2.1) (2.2)
(2.2) (2.3)
(2.3) (2.4)
(2.4) – коэффициент, зависящий от жесткости пружины, конструкции и материала магнита и ЧЭ.
– коэффициент, зависящий от жесткости пружины, конструкции и материала магнита и ЧЭ.


 .
. .
.
 (3.1)
(3.1) (3.2)
(3.2) (3.3)
(3.3) (3.4)
(3.4) (3.5)
(3.5)


