
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Ур-ния напряжения и вект.диагр. синхр. Двиг.Содержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Если к валу ротора синхронной машины, работающей параллельно с сетью, приложен внешний тормозной момент, то вал вместе с полем ротора поворачивается и отстает от поля статора на угол Θ. Возникают тангенциальные составляющие электромагнитных сил, действующих между разноименными полюсами статора и ротора, которые стремятся ориентировать ротор по направлению поля. При этом машина потребляет из сети активную мощность и возникает вращающий электромагнитный момент, который компенсирует действие внешнего тормозного момента. Синхронная машина автоматически переходит в двигательный режим работы - т.е. потребляет из сети электрическую энергию и преобразовывает ее в механическую. Частота вращения ротора остается неизменной, равной частоте вращения магнитного поля статора.
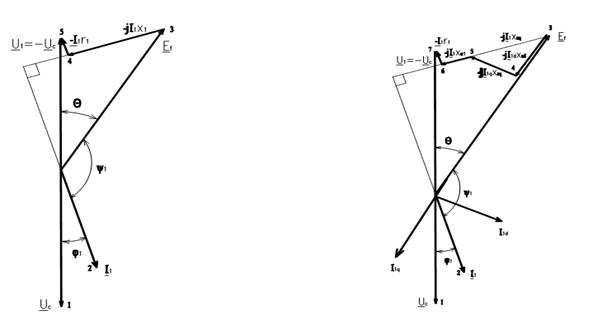
Векторные диаграммы могут быть построены по уравнениям напряжений синхронной машины. Однако для синхронного двигателя в уравнения вместо напряжения машины U, надо подставить - U c, так как термин «напряжение двигателя» обычно не употребляется. При этом для явнополюсной и неявнополюсной машин имеем:
Сначала строят вектор U c. Затем под углом φ1 к вектору U c откладывают вектор тока статора I 1. Активная составляющая тока I 1 совпадает по направлению с U c. Затем под углом ψ1 к вектору тока откладывают вектор ЭДС E f. Для неявнополюсных двигателей из конца вектора E f откладывают вектор -j I 1х1 перпендикулярно вектору I 1. Из конца вектора -j I 1х1 откладывают вектор I 1r1 противоположно вектору I 1. Получают вектор напряжения Для явнополюсных двигателей вектор тока I 1 раскладывают на продольную составляющую I 1d и поперечную I 1q. Поперечная составляющая I 1q направлена встречно E f. Векторные диаграммы синхронного двигателя, работающего с перевозбуждением имеют следующий вид:
При переходе синхронной машины из генераторного режима в двигательный установившаяся скорость вращения машины не меняется, а меняется знак угла Θ на отрицательный. Электромагнитная мощность двигателя определяется также как и генератора: - явнополюсного
- неявнополюсного
Угловые характеристики имеют максимальное значение при Перегрузочная способность двигателя: КП = Mmax/MH = Рmax/РН =2,0-3,0..
Конструкция двигателей аналогична конструкции генераторов соответствующего исполнения. При этом синхронные двигатели отличаются от синхронных генераторов меньшим воздушным зазором, шириной полюсного наконечника (у двигателей 0,9, у генераторов 0,7 ширины полюсного деления), сечением демпферной обмотки (у двигателей сечение больше, так как она используется для запуска). Для возбуждения синхронных двигателей используется или прямая электромашинная система возбуждения или система самовозбуждения с полупроводниковыми выпрямителями. Синхронные двигатели по сравнению с асинхронными имеют следующие достоинства: 1. Возможность работы при cosφ1=1, что приводит к улучшению cosφ сети и уменьшению размеров двигателя, так как его ток меньше тока асинхронного двигателя той же мощности. При работе с опережающим током синхронные двигатели генерируют реактивную мощность в сеть, что снижает потребление асинхронными двигателями этой мощности от генераторов электростанций. 2. Меньшая чувствительность к колебаниям напряжения, так как их максимальный момент пропорционален напряжению сети в первой степени (а не квадрату напряжения). 3. Постоянство частоты вращения независимо от механической нагрузки на валу. Недостатками с инхронных двигателей являются: 1. Сложность конструкции. 2. Сравнительная сложность пуска. 3. Трудности с регулированием частоты вращения, которое возможно только изменением частоты питающего напряжения. Указанные недостатки синхронных двигателей делают их менее выгодными, чем асинхронные двигатели, при мощностях до 100 кВт. Однако при более высоких мощностях, когда особенно важно иметь высокий cosφ и уменьшенные габаритные размеры машины, синхронные двигатели предпочтительнее асинхронных. Синхронные двигатели используют в установках, где не требуется частых пусков и регулирования частоты вращения (вентиляторы, компрессоры, дробилки и т.д.).
|
|||||||
|
|
Последнее изменение этой страницы: 2016-08-26; просмотров: 1555; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.145.63.131 (0.007 с.) |




 ;
; .
.

 . Участок устойчивой работы при 0<q <qкр
. Участок устойчивой работы при 0<q <qкр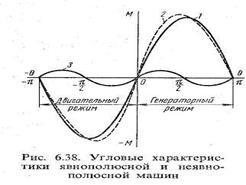
 Трехфазные синхронные двигатели выпускаются на мощность от 20кВт до нескольких десятков тысяч киловатт. При частотах вращения от 100 до 1000 мин-1 двигатели имеют явнополюсное исполнение ротора, при частотах вращения 1500 и 3000 мин-1 — неявнополюсное. В зависимости от мощности двигатели выполняются на напряжения от 220 до 10 000 В.
Трехфазные синхронные двигатели выпускаются на мощность от 20кВт до нескольких десятков тысяч киловатт. При частотах вращения от 100 до 1000 мин-1 двигатели имеют явнополюсное исполнение ротора, при частотах вращения 1500 и 3000 мин-1 — неявнополюсное. В зависимости от мощности двигатели выполняются на напряжения от 220 до 10 000 В.


