Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Коэффициенты первого столбца таблицы должны быть положительны.Содержание книги
Поиск на нашем сайте
100р5+270р4+151 р3+ 22,5р4+ р+288=0 Таблица №7
Ответ: Т.к. с15<0, то система неустойчива. 3. Критерий Михайлова.
Уравнение характеристического вектора получим из характеристического уравнения заменой оператора р®jw. D(p)= 100р5+270р4+151 р3+ 22,5р2+ р+288=0; D(jw)=100(jw)5+270 (jw)4+151(jw)3+22,5(jw)2+jw+288 = 100jw5+270jw4-151jw3- -22,5jw2+jw+288 = (288-22.5w2+270w4)+jw(1-151w2+100w4)=Re(w)+Im(w). Изменяя w в интервале 0<w<¥, рассчитываем Re(w) и Im(w) и заносим в таблицу №8. Таблица №8
Т.к. годограф начинается на положительном отрезке вещественной оси (рис.9), но не обходит 5 квадрантов, то система неустойчива.
Рис. 9
4. Критерий Найквиста.
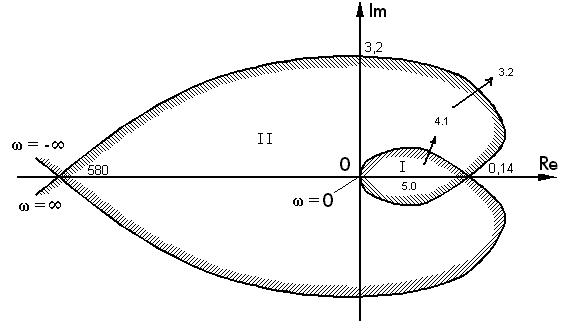
Определяем устойчивость по АФЧХ системы, разомкнутой по главной обратной связи. Wраз(p)= W1(P)* W2(P)* W3(P) * W4(P)= Комплексный коэффициент передачи САУ получим, заменяя p®jw Wраз(jw)= Выведем действительную и мнимую части домножая числитель и знаменатель на комплексно-сопряженные множители.
Re= Задаваясь значениями w из промежутка 0 £ w < ¥, рассчитываем Re(w) и Im(w).
Таблица №9
По данным таблицы строим АФЧХ системы (рис. 10).
Система неустойчива т.к. при дополнении годографа дугой с бесконечным радиусом до положительного отрезка вещественной оси АФЧХ охватывает критическую точку с координатами (–1; 0j). Определим устойчивость, используя ЛАЧХ и ФЧХ системы.
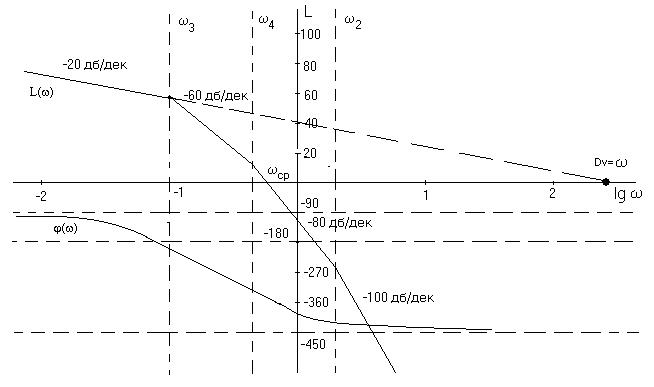
Уравнение для построения ЛАЧХ системы:
20 lg|W(jw)| = 20 lgКэ – 20 lgw – 10 lg(1+T22w2) – 20 lg(1+T32w2) – 10 lg(1+T42w2)
20 lg Kэ = 20 lg 288 = 49,19
Асимптотическую ЛАЧХ легко построить по ЛАЧХ типовых звеньев, суммируя их. Для этого рассчитывают частоты излома
Уравнение для построения ФЧХ системы j(w) = – 90 – arctg(wT2) – 2 arctg(wT3) – arctg(wT4) =
САУ будет устойчива в замкнутом состоянии, если ЛАЧХ пересекает ось частот раньше, чем ФЧХ пересекает линию -180° (рис. 11.). Значит система неустойчива.
5. Метод D-разбиений по коэффициенту усиления.
100р5+270р4+151р3+22,5р2+р+288 = 0, Ксис= 288.
Выражаем коэффициент усиления системы из характеристического уравнения системы: Ксис= -100р5-270р4-151 р3- 22,5р2- р. Заменим p®jw
Ксис= -100(jw)5-270 (jw)4-151(jw)3-22,5(jw)2-jw =
По этому выражению, изменяя 0<w<¥, строим кривую, которая затем дополняется зеркальным отображением относительно оси Х,и заштриховываем (рис. 12.) в соответствии с правилами.
Таблица №10
Рис. 12 Претендентом на область устойчивости является область 1. Определим корни характеристического уравнения (определим устойчивость) при К, взятом из этой области, по критерию Гурвица.
100 р5 + 270 р4 +151 р3 + 22,5 р2 + р + К=0
К=0.1 – получим все отрицательные корни.
Таким образом, САУ будет устойчива, если 0<K<0,14.
Критический коэффициент усиления системы можно определить, используя любой из критериев. D-разбиение позволяет выделить области с различным расположением корней характеристического уравнения на комплексной плоскости при изменении какого-либо параметра (в нашем случае К).
Литература 1. Уразаков К.Р., Андреев В.В., Жулаев В.П. Нефтепромысловое оборудование для кустовых скважин.- М.: Недра, 1999.- С. 80-81. 2. Пат. 2145414 РФ, МПК G 01 L 1/22. Тензорезисторный датчик силы / УППО / Свирский В.В., Мамлеев Р.Ф. // Опубл. 2000.02.10. 3. Хакимьянов М.И., Штанев С.Л. Оценка погрешности датчика усилия ДДС-04 при смещении направления и точки приложения нагрузки // МЕТОДЫ И СРЕДСТВА ИЗМЕРЕНИЯ В СИСТЕМАХ КОНТРОЛЯ И УПРАВЛЕНИЯ: Труды международной научно-технической конференции (Россия, Пенза, 9-10 сентября 2002 г.) / Под ред. М.А. Щербакова.- Пенза: Информационно-издательский центр Пенз. гос. ун-та, 2002.- С. 165-167. 4 Хакимьянов М.И., Ковшов В.Д., Штанев С.Л. Анализ упругих элементов атчиков усилия систем динамометрирования ШГН. «Датчики и преобразователи информации систем измерения, контроля и управления». Сборник материалов XIV Научно-технической конференции с участием зарубежных специалистов. Под редакцией профессора В.Н. Азарова. М.: МГИЭМ, 2002.- С.: 132-133. 5. Левшина Е.С., Новицкий П.В. Электрические измерения физических величин (Измерительные преобразователи): Учеб. пособие для вузов.- Л.: Энергоатомиздат. Ленингр. отд-ние, 1983.- С. 92-106. 6. Cистема динамометрирования стационарная ДДС-04 (динамограф) // http://www.grant-ufa.ru/dds-04.shtml. 7. Чаронов В.Я. Автоматизация работы основного оборудования и проблемы энергосбережения на объектах нефтегазодобычи.- Альметьевск: Изд-во АО «Татнефть», 1998.- 330 с. 8. Жук Е., Шимчак П. Система Lufkin Automation контролирует работу скважин в Беларуси // Нефть и газ Евразия.- 2006.- № 8. С.: 16-27. 9. Ковшов В.Д., Емец С.В., Хакимьянов М.И., Светлакова С.В. Датчики усилия для систем динамометрирования штанговых глубинных насосов добычи нефти // Электронный журнал "Нефтегазовое дело", Уфа, 2007. 10. http://www.ogbus.ru/authors/Kovshov/Kovshov_1.pdf. 16 с. 11. Автоматическое регулирование. Теория и элементы систем: учебник для вузов / под ред. Н. Н. Иващенко – 3-е изд. – Москва: Машиностроение, 1973. – 606 с. 12. Анхимюк, В. Л. Теория автоматического управления: учебное пособие для вузов / В. Л. Анхимюк, О. Ф. Опейко, Н. Н. Михеев. – Минск: Дизайн ПРО, 2000. – 352 с. 13. Анхимюк, В. Л. Теория автоматического управления: учеб. пособие для электротехн. спец. вузов / В. Л. Анхимюк, О. Ф. Опейко, Н. Н. Михеев. – 3-е изд., перераб. и доп. – Минск: Высшая школа, 1979. – 352 с. 14. Бесекерский, В. А. Теория систем автоматического управления / В. А. Бесекерский, Е. П. Попов. – Москва: Наука, 1966. – 992 с.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-16; просмотров: 600; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.129.63.224 (0.007 с.) |







 .
. .
. ;
; ;
; .
.
 .
.