Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Вопрос 41. Уравнения напряжений, мдс и токов асинхронного двигателя. Приведение параметров обмотки ротора. Векторная диаграмма и порядок ее построения. Схема замещения асинхронного двигателя.Содержание книги
Поиск на нашем сайте
Уравнение напряжений обмотки статора асинхронного двигателя:
Уравнение напряжений для цепи ротора асинхронного двигателя: Уравнение токов асинхронного двигателя: I1 =Io – I`2 МДС обмоток статора и ротора на один полюс в режиме нагруженного двигателя
F2 = 0,45 m2 I2 ω2 kоб2/ P где m2 — число фаз в обмотке ротора; ko62 — обмоточный коэффициент обмотки ротора. Чтобы векторы ЭДС, напряжений и токов обмоток статора и ротора можно было изобразить на одной векторной диаграмме, следует параметры обмотки ротора привести к обмотке статора, т. е. обмотку ротора с числом фаз m2, обмоточным коэффициентом ko62 и числом витков одной фазной обмоткиω2 заменить обмоткой с m1, ω1 и kоб1. При этом мощности и фазовые сдвиги векторов ЭДС и токов ротора после приведения должны остаться такими же, что и до приведения. Основанием для построения этой диаграммы являются уравнение токов и уравнения напряжений обмоток статора и ротора. Порядок построения векторной диаграммы: 1. Откладываем вектор магнитного потока Ф. 2. Под углом 90о к Ф в сторону отставания откладываем векторы ЭДС Е2/ и Е1. 3. Под углом фи2 к вектору Е2/ в сторону отставания (обмотка ротора содержит индуктивность) откладываем вектор тока I2/. 4. Используя третье уравнение токов находим вектор тока ротора I2/. 5. Вектор напряжения U1 определяются путем построения по уравнению напряжения. 6. Достраиваем диаграмму, учитывая уравнение напряжения ротора.
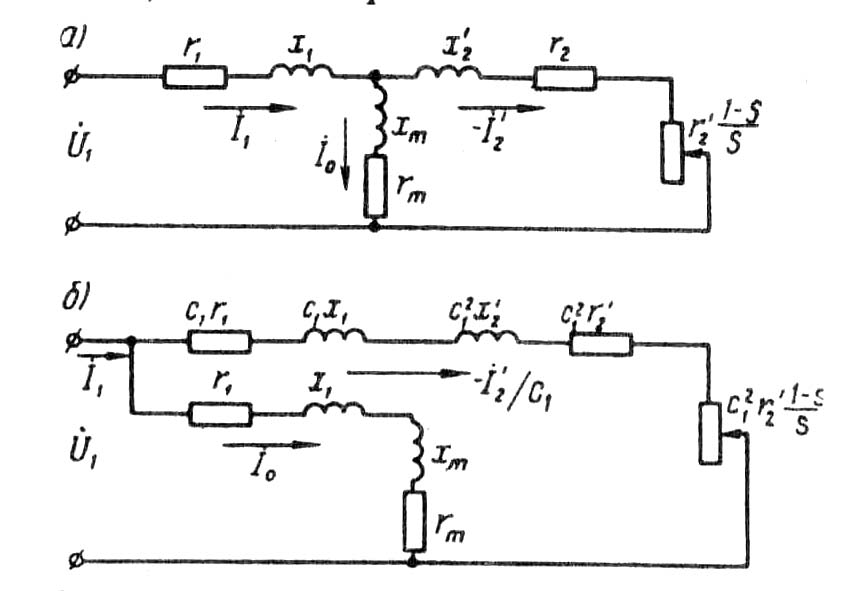
Схемы замещения применяет для упрощения расчетов. На рис. а представлена Т-образная схема замещения. Магнитная связь обмоток статора и ротора в асинхронном двигателе на схеме замещения заменена электрической связью цепей статора и ротора. Активное сопротивление можно рассматривать как внешнее сопротивление, включенное в обмотку неподвижного ротора. В этом случае асинхронный двигатель аналогичен трансформатору, работающему на активную нагрузку. Сопротивление– единственный переменный параметр схемы. Значение этого сопротивления определяется скольжением, а следовательно, механической нагрузкой на валу двигателя. Так, если нагрузочный момент на валу двигателя М2 = 0, то скольжение s ≈ 0. При этом r2' (1 - s)/ s = ∞, что соответствует работе двигателя в режиме х.х. Если же нагрузочный момент на валу двигателя превышает его вращающий момент, то ротор останавливается (s=1). При этом r2'(1 - s)/ s = О, что соответствует режиму к.з. асинхронного двигателя. Более удобной для практического применения является Г- образная схема замещения (рис. б), у которой намагничивающий контур (Zm = rm+ j xm) вынесен на входные зажимы схемы замещения. Чтобы при этом намагничивающий ток I0 не изменил своего значения, в этот контур последовательно включают сопротивления обмотки статора r1 и х1. Полученная таким образом схема удобна тем, что она состоит из двух параллельно соединенных контуров: намагничивающего с током
Электрические потери (потери в обмотке статора) в асинхронном двигателе вызваны нагревом обмоток статора и ротора проходящими по ним токами. Величина этих потерь пропорциональна квадрату тока в обмотке. Магнитные потери (потери в стали) в асинхронном двигателе вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике при его перемагничивании. Величина магнитных потерь зависит от частоты перемагничивания Механические потери — это потери на трение в подшипниках и вентилятор о воздух. Величина этих потерь пропорциональна квадрату частоты вращения ротора. КПД АД: Коэффициент полезного действия трансформатора равен отношению активной мощности на выходе вторичной обмотки Р2 к активной мощности на входе первичной обмотки Р1. КПД трансформатора зависит как от величины (β), так и от характера (cosφ2) нагрузки. Максимальное значение КПД соответствует нагрузке, при которой магнитные потери равны электрическим: Р0ном =β'2/РК.НОМ. Обычно КПД трансформатора имеет максимальное значение при β'=0,45÷0,65. h = Р2 / Р1
|
|||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 788; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.139.81.115 (0.006 с.) |

 1 = (-
1 = (-  1) + j
1) + j  1 x1 +
1 x1 +  2s - j
2s - j  2 x2 s -
2 x2 s -  F1 = 0,45 m1 I1 ω1 kоб1/ P
F1 = 0,45 m1 I1 ω1 kоб1/ P