Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Development of computer aided design of mechanical drives antenna. Chivilev A.D.Содержание книги
Поиск на нашем сайте
The article focuses on the development of the automatic design of mechanical drives antenna systems. Methods for the synthesis allows automated mechanical systems and selecting the most efficient performance of the drive, with reference to developed antenna system. Существующая проблема. При проектировании новых антенных систем большую роль в выборе варианта исполнения приводных устройств играют личные предпочтения лица принимающего решения (ЛПР). Данное обстоятельство часто приводит к тому, что часто выбирается вариант не являющийся наиболее оптимальным в рамках решаемой задачи. Кроме эвристической составляющей присутствует проблема ограниченности по срокам разработки конструкторской документации. Даже на предварительные расчеты нескольких возможных вариантов требуют значительных временных затрат. В качестве решения приведенных проблем предлагается создание методики автоматизированного расчета и последующего выбора наиболее рационального варианта исполнения механического привода. Что предлагается. Сущность метода представляет собой выполнение последовательных операций, позволяющих уменьшить участие ЛПР в ходе работы, а так же значительно сократить трудоемкость предварительных расчетов. · Поиск вариантов исполнения привода удовлетворяющих техническому заданию (ТЗ). · Расчет каждого из полученных вариантов исполнения. Формирование области допустимых решений внутри каждого типа исполнения привода. · Применение неметрических критериев для поиска оптимальных альтернатив для каждого типа привода. · Возможности улучшения полученных альтернатив. · Поиск оптимальных вариантов с учетом улучшенных. · Формирование общей области допустимых решений, полученной из оптимальных альтернатив каждого типа привода. · Поиск альтернатив наиболее полно удовлетворяющих поставленному ТЗ. · В случае получения нескольких лучших вариантов, окончательных выбор осуществляется ЛПР. ДИАГНОСТИКА ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ ЭЛЕМЕНТОВ РОБАСТНЫХ СИСТЕМ В. П. Шевчук (Национальный исследовательский университет «МЭИ», Волжский, Россия)
Diagnostics software elements of robust systems, Shevchuk V.P. Discusses the mathematical, software and metrological provision for diagnostics of measuring channels multifunctional control systems.
Особенно актуальными для современных систем автоматического управления являются проверка работоспособности алгоритмов робастной системы и адекватности математических моделей метрологических характеристик. Эти задачи могут выполняться только методами имитационного моделирования на специальных стендах для диагностики программного обеспечения виртуальных приборов, создаваемых специально для этих целей. Например, стенд для диагностики программного обеспечения многофункциональных систем контроля и управления [1]. Информационно-измерительные каналы этого стенда (см. рисунок 1) реализуют чистую передачу истинного значения измерительной информации, поэтому метрологические характеристики технических средств автоматизации (например, полевого прибора [2]) полностью определяются элементами стенда, моделью объекта управления, режимами цифровой обработки информации и физическими свойствами самого тестируемого прибора. При моделировании измерительной системы, статическая характеристика датчика измерительной информации принимается линейной с коэффициентом передачи равным единица, то есть Y(t) =X(t). Динамические свойства датчика измерительной информации принимаются в виде апериодического звена первого порядка
Рис. 1 Стенд для диагностики полевых приборов [1]
Стенд содержит программный блок генерации сигналов 1 и связанный с ним эталонный программно-аппаратный блок обработки измерительной информации 2. Блок 1 состоит из блока имитации стационарной и нестационарной измерительной информации 3, блока интерфейса пользователя 4, блока регистрации измерительной информации 5, который соединен с блоком приема-передачи измерительной информации 6. Блок 2 содержит блок приема-передачи измерительной информации 7, связанный с блоком вычисления эталонного значения параметра, получаемого косвенными измерениями 8, блоком вывода сигналов 9 и блоком ввода сигналов 10. Блок 9 имеет шестнадцать каналов вывода аналоговых сигналов 11 и шестнадцать каналов вывода дискретных сигналов 12. Блок 12 имеет шестнадцать каналов ввода аналоговых сигналов 13 и шестнадцать каналов ввода дискретных сигналов 14. К вводам и выводам стенда подключается диагностируемое устройство систем контроля и управления 15. Стенд функционирует следующим образом, блок обработки измерительной информации 2 реализован на базе промышленного контроллера DeCont и содержит блок приема-передачи измерительной информации 7, связанный с блоком вычисления эталонного значения 8, блоком вывода сигналов (ЦАП) 9 и блоком ввода сигналов (АЦП) 10. К вводам и выводам стенда 11, подключается исследуемая измерительная система 15. В блоке имитации сигналов генерируется измерительная информация с заданными статистическими характеристиками (математическое ожидание, дисперсия, скорость изменения), передаваемая в блок эталонных вычислений, а также в исследуемую систему. Результаты измерений с выхода исследуемой измерительной системы 15 и блока эталонных вычислений 8 передаются в блок интерфейса пользователя для отображения, а также записываются в архив блоком регистрации измерительной информации для последующего анализа. Для решения задач диагностики программного обеспечения робастных систем создано специальное программное обеспечение стенда – это пакет прикладных программ ППП «СДПСУ, функциональная схема информационных потоков в котором, изображена на рисунке 2.
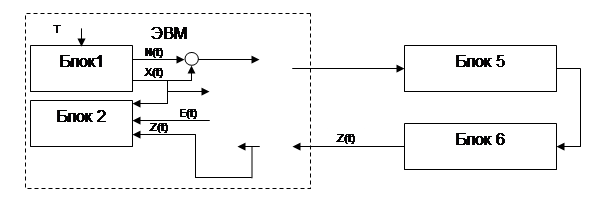
ППП «СДПСУ» функционирует следующим образом. Истинные значения измеряемой величины, X(t), и помехи, N(t), моделируются в блоке 1 по алгоритмам, которые подробно описаны в работе [3]. Сигнал с аддитивной помехой: X(t)+N(t), преобразуется в аналоговый с помощью блока 5 и возвращается в ЭВМ общего назначения, посредством блока 6. Прошедший двойную дискретизацию сигнал, Z(t), после предварительной обработки в блоках 4 и 3, поступает на визуализацию в блок 2.
Рис. 2. Схема информационных потоков стенда [1]
Таким образом, стендом [1] фактически проводится имитация работы виртуального прибора с оценкой основных метрологических характеристик программно-аппаратного измерительного канала. Используемая литература: 1. Шевчук В.П., Болдырев И.А., Шамигулов П.В. Стенд для диагностики программного обеспечения и измерительных каналов многофункциональных систем контроля и управления //Патент на полезную модель № 94333. Зарегистрировано в Государственном реестре полезных моделей 20.05.2010. - Бюл. № 14. 2. Шевчук В.П., Болдырев И.А. Изменяемый полевой прибор //Патент на полезную модель № 84965. Зарегистрировано в Государственном реестре полезных моделей 20.07.09 г. - Бюл. № 20. 3. Шевчук В.П. Моделирование метрологических характеристик интеллектуальных измерительных приборов и систем. -М.: ФИЗМАТЛИТ, 2011. - 320 с. – ISBN 978-5-9221-1314-4.
|
|||||||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 338; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.148.103.24 (0.008 с.) |

 , где Kp – коэффициент передачи, Tp – время.
, где Kp – коэффициент передачи, Tp – время.