Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Особенности реализации WindowsСодержание книги
Похожие статьи вашей тематики
Поиск на нашем сайте
Используется четыре понятия: Задание - набор процессов с общими квотами и лимитами Процесс - контейнер ресурсов (память...), содержит как минимум один поток. Поток - именно исполняемая часть, планируемая ядром. Волокно - облегченный поток, управляемый полностью в пространстве пользователя. Один поток может содержать несколько волокон. 20 Понятия: приоритет, квант, вытесняющая и невытесняющая многозадачность (с примерами конкретных ОС). В основе многих вытесняющих алгоритмов планирования лежит концепция квантования. В соответствии с этой концепцией каждому потоку поочередно для выполнения предоставляется ограниченный непрерывный период процессорного времени — квант. Смена активного потока происходит, если: · поток завершился и покинул систему; · произошла ошибка; · поток перешел в состояние ожидания; · исчерпан квант процессорного времени, отведенный данному потоку. Поток, который исчерпал свой квант, переводится в состояние готовности и ожидает, когда ему будет предоставлен новый квант процессорного времени, а на выполнение в соответствии с определенным правилом выбирается новый поток из очереди готовых. Граф состояний потока, изображенный на рис. 4.6, соответствует алгоритму планирования, основанному на квантовании.
Рис. 4.6. Граф состояний потока в системе с квантованием Кванты, выделяемые потокам, могут быть одинаковыми для всех потоков или различными. Рассмотрим, например, случай, когда всем потокам предоставляются кванты одинаковой длины q (рис. 4.7). Если в системе имеется п потоков, то время, которое поток проводит в ожидании следующего кванта, можно грубо оценить как q(n-l). Чем больше потоков в системе, тем больше время ожидания, тем меньше возможности вести одновременную интерактивную работу нескольким пользователям. Но если величина кванта выбрана очень небольшой, то значение произведения q(n-l) все равно будет достаточно мало для того, чтобы пользователь не ощущал дискомфорта от присутствия в системе других пользователей. Типичное значение кванта в системах разделения времени составляет десятки миллисекунд.
Рис. 4.7. Иллюстрация расчета времени ожидания в очереди Если квант короткий, то суммарное время, которое проводит поток в ожидании процессора, прямо пропорционально времени, требуемому для его выполнения (то есть времени, которое потребовалось бы для выполнения этого потока при монопольном использовании вычислительной системы). Действительно, поскольку время ожидания между двумя циклами выполнения равно q(n-l), а количество циклов B/q, где В — требуемое время выполнения, то W*B(n-l). Заметим, что эти соотношения представляют собой весьма грубые оценки, основанные на предположении, что В значительно превышает q. При этом не учитывается, что потоки могут использовать кванты не полностью, что часть времени они могут тратить на ввод-вывод, что количество потоков в системе может динамически меняться и т. д. Чем больше квант, тем выше вероятность того, что потоки завершатся в результате первого же цикла выполнения, и тем менее явной становится зависимость времени ожидания потоков от их времени выполнения. При достаточно большом кванте алгоритм квантования вырождается в алгоритм последовательной обработки, присущий однопрограммным системам, при котором время ожидания задачи в очереди вообще никак не зависит от ее длительности. Кванты, выделяемые одному потоку, могут быть фиксированной величины, а могут и изменяться в разные периоды жизни потока. Пусть, например, первоначально каждому потоку назначается достаточно большой квант, а величина каждого следующего кванта уменьшается до некоторой заранее заданной величины. В таком случае преимущество получают короткие задачи, которые успевают выполняться в течение первого кванта, а длительные вычисления будут проводиться в фоновом режиме. Можно представить себе алгоритм планирования, в котором каждый следующий квант, выделяемый определенному потоку, больше предыдущего. Такой подход позволяет уменьшить накладные расходы на переключение задач в том случае, когда сразу несколько задач выполняют длительные вычисления. Потоки получают для выполнения квант времени, но некоторые из них используют его не полностью, например из-за необходимости выполнить ввод или вывод данных. В результате возникает ситуация, когда потоки с интенсивными обращениями к вводу-выводу используют только небольшую часть выделенного им процессорного времени. Алгоритм планирования может исправить эту «несправедливость». В качестве компенсации за неиспользованные полностью кванты потоки получают привилегии при последующем обслуживании. Для этого планировщик создает две очереди готовых потоков (рис. 4.8). Очередь 1 образована потоками, которые пришли в состояние готовности в результате исчерпания кванта времени, а очередь 2 — потоками, у которых завершилась операция ввода-вывода. При выборе потока для выполнения прежде всего просматривается вторая очередь, и только если она пуста, квант выделяется потоку из первой очереди. Многозадачные ОС теряют некоторое количество процессорного времени для выполнения вспомогательных работ во время переключения контекстов задач. При этом запоминаются и восстанавливаются регистры, флаги и указатели стека, а также проверяется статус задач для передачи управления. Затраты на эти вспомогательные действия не зависят от величины кванта времени, поэтому чем больше квант, тем меньше суммарные накладные расходы, связанные с переключением потоков. Рис. 4.8. Квантование с предпочтением потоков, интенсивно обращающихся к вводу-выводу
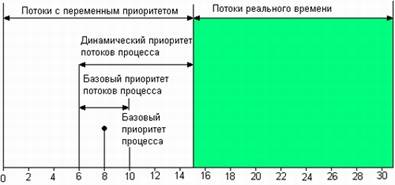
ПРИМЕЧАНИЕ В алгоритмах, основанных на квантовании, какую бы цель они не преследовали (предпочтение коротких или длинных задач, компенсация недоиспользованного кванта или минимизация накладных расходов, связанных с переключениями), не используется никакой предварительной информации о задачах. При поступлении задачи на обработку ОС не имеет никаких сведений о том, является ли она короткой или длинной, насколько интенсивными будут ее запросы к устройствам ввода-вывода, насколько важно ее быстрое выполнение и т. д. Дифференциация обслуживания при квантовании базируется на «истории существования» потока в системе. Алгоритмы планирования, основанные на приоритетах Другой важной концепцией, лежащей в основе многих вытесняющих алгоритмов планирования, является приоритетное обслуживание. Приоритетное обслуживание предполагает наличие у потоков некоторой изначально известной характеристики — приоритета, на основании которой определяется порядок их выполнения. Приоритет — это число, характеризующее степень привилегированности потока при использовании ресурсов вычислительной машины, в частности процессорного времени: чем выше приоритет, тем выше привилегии, тем меньше времени будет проводить поток в очередях. Приоритет может выражаться целым или дробным, положительным или отрицательным значением. В некоторых ОС принято, что приоритет потока тем выше, чем больше (в арифметическом смысле) число, обозначающее приоритет. В других системах, наоборот, чем меньше число, тем выше приоритет. В большинстве операционных систем, поддерживающих потоки, приоритет потока непосредственно связан с приоритетом процесса, в рамках которого выполняется данный поток. Приоритет процесса назначается операционной системой при его создании. Значение приоритета включается в описатель процесса и используется при назначении приоритета потокам этого процесса. При назначении приоритета вновь созданному процессу ОС учитывает, является этот процесс системным или прикладным, каков статус пользователя, запустившего процесс, было ли явное указание пользователя на присвоение процессу определенного уровня приоритета. Поток может быть инициирован не только по команде пользователя, но и в результате выполнения системного вызова другим потоком. В этом случае при назначении приоритета новому потоку ОС должна принимать во внимание значение параметров системного вызова. Во многих ОС предусматривается возможность изменения приоритетов в течение жизни потока. Изменение приоритета могут происходить по инициативе самого потока, когда он обращается с соответствующим вызовом к операционной системе, или по инициативе пользователя, когда он выполняет соответствующую команду. Кроме того, ОС сама может изменять приоритеты потоков в зависимости от ситуации, складывающейся в системе. В последнем случае приоритеты называются динамическими в отличие от неизменяемых, фиксированных, приоритетов. От того, какие приоритеты назначены потокам, существенно зависит эффективность работы всей вычислительной системы. В современных ОС во избежание разбалансировки системы, которая может возникнуть при неправильном назначении приоритетов, возможности пользователей влиять на приоритеты процессов и потоков стараются ограничивать. При этом обычные пользователи, как правило, не имеют права повышать приоритеты своим потокам, это разрешено делать (да и то в определенных пределах) только администраторам. В большинстве же случаев ОС присваивает приоритеты потокам по умолчанию. В качестве примера рассмотрим схему назначения приоритетов потокам, принятую в операционной системе Windows NT (рис. 4.9). В системе определено 32 уровня приоритетов и два класса потоков — потоки реального времени и потоки с переменными приоритетами. Диапазон от 1 до 15 включительно отведен для потоков с переменными приоритетами, а от 16 до 31 — для более критичных ко времени потоков реального времени (приоритет 0 зарезервирован для системных целей).
Рис. 4.9. Схема назначения приоритетов в Windows NT
При создании процесса он в зависимости от класса получает по умолчанию базовый приоритет в верхней5 или нижней части диапазона. Базовый приоритет процесса в дальнейшем может быть повышен или понижен операционной системой. Первоначально Поток получает значение базового приоритета из диапазона базового приоритета процесса, в котором он был создан. Пусть, например, значение базового приоритета некоторого процесса равно К. Тогда все потоки данного процесса получат базовые приоритеты из диапазона [К-2, К+2]. Отсюда видно, что, изменяя базовый приоритет процесса, ОС может влиять на базовые приоритеты его потоков. В Windows NT с течением времени приоритет потока, относящегося к классу потоков с переменными приоритетами, может отклоняться от базового приоритета потока, причем эти изменения могут быть не связаны с изменениями базового приоритета процесса. ОС может повышать приоритет потока (который в этом случае называется динамическим) в тех случаях, когда поток не полностью использовал отведенный ему квант, или понижать приоритет, если квант был использован полностью. ОС наращивает приоритет дифференцирование в зависимости от того, какого типа событие не дало потоку полностью использовать квант. В частности, ОС повышает приоритет в большей степени потокам, которые ожидают ввода с клавиатуры (интерактивным приложениям) и в меньшей степени — потокам, выполняющим дисковые операции. Именно на основе динамических приоритетов осуществляется планирование потоков. Начальной точкой отсчета для динамического приоритета является значение базового приоритета потока. Значение динамического приоритета потока ограничено снизу его базовым приоритетом, верхней же границей является нижняя граница диапазона приоритетов реального времени. Существуют две разновидности приоритетного планирования: обслуживание с относительными приоритетами и обслуживание с абсолютными приоритетами. В обоих случаях выбор потока на выполнение из очереди готовых осуществляется одинаково: выбирается поток, имеющий наивысший приоритет. Однако проблема определения момента смены активного потока решается по-разному. В системах с относительными приоритетами активный поток выполняется до тех пор, пока он сам не покинет процессор, перейдя в состояние ожидания (или же произойдет ошибка, или поток завершится). На рис. 4.10, а показан граф состояний потока в системе с относительными приоритетами. В системах с абсолютными приоритетами выполнение активного потока прерывается кроме указанных выше причин, еще при одном условии: если в очереди готовых потоков появился поток, приоритет которого выше приоритета активного потока. В этом случае прерванный поток переходит в состояние готовности (рис. 4.10, б). В системах, в которых планирование осуществляется на основе относительных приоритетов, минимизируются затраты на переключения процессора с одной работы на другую. С другой стороны, здесь могут возникать ситуации, когда одна задача занимает процессор долгое время. Ясно, что для систем разделения времени и реального времени такая дисциплина обслуживания не подходит: интерактивное приложение может ждать своей очереди часами, пока вычислительной задаче не потребуется ввод-вывод. А вот в системах пакетной обработки (в том числе известной ОС OS/360) относительные приоритеты используются широко.
Рис. 4.10. Графы состояний потоков в системах с относительными и абсолютными приоритетами В системах с абсолютными приоритетами время ожидания потока в очередях может быть сведено к минимуму, если ему назначить самый высокий приоритет. Такой поток будет вытеснять из процессора все остальные потоки (кроме потоков, имеющих такой же наивысший приоритет). Это делает планирование на основе абсолютных приоритетов подходящим для систем управления объектами, в которых важна быстрая реакция на событие. Смешанные алгоритмы планирования Во многих операционных системах алгоритмы планирования построены с использованием как концепции квантования, так и приоритетов. Например, в основе планирования лежит квантование, но величина кванта и/или порядок выбора потока из очереди готовых определяется приоритетами потоков. Именно так реализовано планирование в системе Windows NT, в которой квантование сочетается с динамическими абсолютными приоритетами. На выполнение выбирается готовый поток с наивысшим приоритетом. Ему выделяется квант времени. Если во время выполнения в очереди готовых появляется поток с более высоким приоритетом, то он вытесняет выполняемый поток. Вытесненный поток возвращается в очередь готовых, причем он становится впереди всех остальных потоков имеющих такой же приоритет. Рассмотрим более подробно алгоритм планирования в операционной системе UNIX System V Release 4. В этой ОС понятие «поток» отсутствует, и планирование осуществляется на уровне процессов. В системе UNIX System V Release 4 реализована вытесняющая многозадачность, основанная на использовании приоритетов и квантования. Каждый процесс в зависимости от задачи, которую он решает, относится к одному из трех определенных в системе приоритетных классов: классу реального времени, классу системных процессов или классу процессов разделения времени. Назначение и обработка приоритетов выполняются для разных классов по-разному. Процессы системного класса, зарезервированные для ядра, используют стратегию фиксированных приоритетов. Уровень приоритета процессу назначается ядром и никогда не изменяется. Процессы реального времени также используют стратегию фиксированных приоритетов, но пользователь может их изменять. Так как при наличии готовых к выполнению процессов реального времени другие процессы не рассматриваются, то процессы реального времени надо тщательно проектировать, чтобы они не захватывали процессор на слишком долгое время. Характеристики планирования процессов реального времени включают две величины: уровень глобального приоритета и квант времени. Для каждого уровня приоритета по умолчанию имеется своя величина кванта времени. Процессу разрешается захватывать процессор на указанный квант времени, а по его истечении планировщик снимает процесс с выполнения. Процессы разделения времени были до появления UNIX System V Release 4 единственным классом процессов, и по умолчанию UNIX System V Release 4 назначает новому процессу именно этот класс. Состав класса процессов разделения времени наиболее неопределенный и часто меняющийся в отличие от системных процессов и процессов реального времени. Для справедливого распределения времени процессора между процессами в этом классе используется стратегия динамических приоритетов. Величина приоритета, назначаемого процессам разделения времени, вычисляется пропорционально значениям двух составляющих: пользовательской части и системной части. Пользовательская часть приоритета может быть изменена администратором и владельцем процесса, но в последнем случае только в сторону его снижения. Системная составляющая позволяет планировщику управлять процессами в зависимости от того, как долго они занимают процессор, не уходя в состояние ожидания. У тех процессов, которые потребляют большие периоды процессорного времени без ухода в состояние ожидания, приоритет снижается, а у тех процессов, которые часто уходят в состояние ожидания после короткого периода ' использования процессора, приоритет повышается. Таким образом, процессам, ведущим себя не «по-джентльменски», дается низкий приоритет. Это означает, что они реже выбираются для выполнения. Это ущемление в правах компенсируется тем, что процессам с низким приоритетом даются большие кванты времени, чем процессам с высокими приоритетами. Таким образом, хотя низкоприоритетный процесс и не работает так часто, как высокоприоритетный, но зато, когда он наконец выбирается для выполнения, ему отводится больше времени. Другой пример относится к операционной системе OS/2. Планирование здесь основано на использовании квантования и абсолютных динамических приоритетов. На множестве потоков определены приоритетные классы — критический (time critical), серверный (server), стандартный (regular) и остаточный (idle), в каждом из которых имеется 32 приоритетных уровня. Потоки критического класса имеют наивысший приоритет. В этот класс могут быть отнесены, например, системные потоки, выполняющие задачи управления сетью. Следующий по приоритетности класс предназначен, как это следует из его названия, для потоков, обслуживающих серверные приложения. К стандартному классу могут быть отнесены потоки обычных приложений. Потоки, входящие в остаточный класс, имеют самый низкий приоритет. К этому классу относится, например, поток, выводящий на экран заставку, когда в системе не выполняется никакой работы. Поток из менее приоритетного класса не может быть выбран для выполнения, пока в очереди более приоритетного класса имеется хотя бы один поток. Внутри каждого класса потоки выбираются также по приоритетам. Потоки, имеющие одинаковое значение приоритета, обслуживаются в циклическом порядке. Приоритеты могут изменяться планировщиком в следующих случаях: Если поток находится в ожидании процессорного времени дольше, чем это задано системной переменной MAXWAIT, то его уровень приоритета будет автоматически увеличен операционной системой. При этом результирующее значение приоритета не должно превышать нижней границы диапазона приоритетов критического класса. Если поток ушел на выполнение операции ввода-вывода, то после ее завершения он получит наивысшее значение приоритета своего класса. Приоритет потока автоматически повышается, когда он поступает на выполнение. ОС динамически устанавливает величину кванта, отводимого потоку для выполнения. Величина кванта зависит от загрузки системы и интенсивности подкачки. Параметры настройки системы позволяют явно задать границы изменения кванта. В любом случае он не может быть меньше 32 мс и больше 65 536 мс. Если поток был прерван до истечения кванта, то следующий выделенный ему интервал выполнения будет увеличен на время, равное одному периоду таймера (около 32 мс), и так до тех пор, пока квант не достигнет заранее заданного при настройке ОС предела. Благодаря такому алгоритму планирования в OS/2 ни один поток не будет «забыт» системой и получит достаточно процессорного времени. Планирование в системах реального времени В системах реального времени, в которых главным критерием эффективности является обеспечение временных характеристик вычислительного процесса, планирование имеет особое значение. Любая система реального времени должна реагировать на сигналы управляемого объекта в течение заданных временных ограничений. Необходимость тщательного планирования работ облегчается тем, что в системах реального времени весь набор выполняемых задач известен заранее. Кроме того, часто в системе имеется информация о временах выполнения задач, моментах активизации, предельных допустимых сроках ожидания ответа и т. д. Эти данные могут быть использованы планировщиком для создания статического расписания или для построения адекватного алгоритма динамического планирования. При разработке алгоритмов планирования для систем реального времени необходимо учитывать, какие последствия в этих системах возникают при несоблюдении временных ограничений. Если эти последствия катастрофичны, как, например, для системы управления полетами или атомной электростанцией, то операционная система реального времени, на основе которой строится управление объектом, называется жесткой (hard). Если же последствия нарушения временных ограничений не столь серьезны, то есть сравнимы с той пользой, которую приносит система управления объектом, то система является мягкой (soft) системой реального времени. Примером мягкой системы реального времени является система резервирования билетов. Если из-за временных нарушений оператору не удается зарезервировать билет, это не очень страшно — можно просто послать запрос на резервирование заново. В жестких системах реального времени время завершения выполнения каждой из критических задач должно быть гарантировано для всех возможных сценариев работы системы. Такие гарантии могут быть даны либо в результате исчерпывающего тестирования всех возможных сценариев поведения управляемого объекта и управляющих программ, либо в результате построения статического расписания, либо в результате выбора математически обоснованного динамического алгоритма планирования. При построении расписания надо иметь в виду, что для некоторых наборов задач в принципе невозможно найти расписания, при котором бы удовлетворялись заданные временные характеристики. С целью определения возможности существования расписания могут быть использованы различные критерии. Например, в качестве простейшего критерия может служить условие, что разность между предельным сроком выполнения задачи (после появления запроса на ее выполнение) и временем ее вычисления (при условии непрерывного выполнения) всегда должна быть положительной. Очевидно, что такой критерий является необходимым, но недостаточным. Точные критерии, гарантирующие наличие расписания, являются очень сложными в вычислительном отношении. В мягких системах реального времени предполагается, что заданные временные ограничения могут иногда нарушаться, поэтому здесь обычно применяются менее затратные способы планирования. ПРИМЕЧАНИЕ При рассмотрении в качестве примеров подсистем планирования потоков/процессов в операционных системах Windows NT, OS/2 и UNIX System V Release 4 было отмечено, что во всех этих системах имеется приоритетный класс реального времени. Для потоков/процессов, относящихся к этому классу, каждая из вышеназванных систем не гарантирует выполнение заданных временных ограничений, а лишь обеспечивает предпочтение в скорости обслуживания. Следовательно, эти ОС могут быть основой для построения мягких систем реального времени, но непригодны для жестких систем реального времени. В зависимости от характера возникновения запросов на выполнение задач полезно разделять их на два типа: периодические и спорадические. Начиная с момента первоначального запроса все будущие моменты запроса периодической задачи можно определить заранее путем прибавления к моменту начального запроса величины, кратной известному периоду. Времена запросов на выполнение спорадических задач заранее не известны. Предположим, что имеется периодический набор задач {Тi} с периодами рi предельными сроками di и требованиями ко времени выполнения ci. Для проверки возможности существования расписания достаточно проанализировать расписание на периоде времени, равном по крайней мере наименьшему общему множителю периодов этих задач. Необходимым критерием существования расписания для набора периодических задач является следующее достаточно очевидное утверждение: сумма коэффициентов использования mi= сi/рi должна быть меньше или равна k, где k — количество доступных процессоров, то есть: mi=Sum(ci/pi)<=k При выборе алгоритма планирования следует учитывать данные о возможной зависимости задач. Эта зависимость может выступать, например, в виде ограничений на последовательность выполнения задач или их синхронизации, вызванной взаимными исключениями (запрете выполнения некоторых задач в течение определенных периодов времени). С практической точки зрения алгоритмы планирования зависимых задач более важны, чем алгоритмы планирования независимых задач. При наличии дешевых микроконтроллеров нет смысла организовывать мультипрограммное выполнение большого количества независимых задач на одном компьютере, так как при этом значительно возрастает сложность программного обеспечения. Обычно одновременно выполняющиеся задачи должны обмениваться информацией и получать доступ к общим данным для достижения общей цели системы, то есть являются зависимыми задачами. Поэтому существование некоторого предпочтения последовательности выполнения задач или взаимного исключения — это скорее норма для систем управления реального времени, чем исключение. Проблема планирования зависимых задач очень сложна, нахождение ее оптимального решения требует больших вычислительных ресурсов, сравнимых с теми, которые требуются для собственно выполнения задач управления. Решение этой проблемы возможно за счет следующих мер: Разделение проблемы планирования на две части, чтобы одна часть выполнялась заранее, перед запуском системы, а вторая, более простая часть — во время работы системы. Предварительный анализ набора задач с взаимными исключениями может состоять, например, в выявлении так называемых запрещенных областей времени, в течение которых нельзя назначать выполнение задач, содержащих критические секции. Введение ограничивающих предположений о поведении набора задач. При таком подходе планирование приближается к статическому. Возвращаясь к планированию независимых задач, рассмотрим классический алгоритм для жестких систем реального времени с одним процессором, разработанный в 1973 году Лью (Liu) и Лейландом (Layland). Алгоритм является динамическим, то есть он использует вытесняющую многозадачность и основан на относительных статических (неизменяемых в течение жизни задачи) приоритетах. Алгоритм основан на следующих предположениях: Запросы на выполнение всех задач набора, имеющих жесткие ограничения на время реакции, являются периодическими. Все задачи независимы. Между любой парой задач не существует никаких ограничений на предшествование или на взаимное исключение. Срок выполнения каждой задачи равен ее периоду pi. Максимальное время выполнения каждой задачи ci известно и постоянно. Время переключения контекста можно игнорировать. Максимальный суммарный коэффициент загрузки процессора X ci/pi при существовании п задач не превосходит n(21/n - 1). Эта величина при стремлении n к бесконечности приблизительно равна In 2, то есть 0.7. Суть алгоритма состоит в том, что всем задачам назначаются статические приоритеты в соответствии с величиной их периодов выполнения. Задача с самым коротким периодом получает наивысший приоритет, а задача с наибольшим периодом выполнения получает наименьший.приоритет. При соблюдении всех ограничений этот алгоритм гарантирует выполнение временных ограничений для всех задач во всех ситуациях. Если же периоды повторения задач кратны периоду выполнения самой короткой задачи, то требование к максимальному коэффициенту загрузки процессора смягчается — он может доходить до 1. Существуют также алгоритмы с динамическим изменением приоритетов, которые назначаются в соответствии с такими текущими параметрами задачи как, например, конечный срок выполнения (deadline). При необходимости назначения некоторой задачи на выполнение выбирается та, у которой текущее значение разницы между конечным сроком выполнения и временем, требуемым для ее непрерывного выполнения, является наименьшим. Моменты перепланировки Для реализации алгоритма планирования ОС должна получать управление всякий раз, когда в системе происходит событие, требующее перераспределения процессорного времени. К таким событиям могут быть отнесены следующие: Прерывание от таймера, сигнализирующее, что время, отведенное активной задаче на выполнение, закончилось. Планировщик переводит задачу в состояние готовности и выполняет перепланирование. Активная задача выполнила системный вызов, связанный с запросом на ввод-вывод или на доступ к ресурсу, который в настоящий момент занят (например, файл данных). Планировщик переводит задачу в состояние ожидания и выполняет перепланирование. Активная задача выполнила системный вызов, связанный с освобождением ресурса. Планировщик проверяет, не ожидает ли этот ресурс какая-либо задача. Если да, то эта задача переводится из состояния ожидания в состояние готовности. При этом, возможно, что задача, которая получила ресурс, имеет более высокий приоритет, чем текущая активная задача. После перепланирования более приоритетная задача получает доступ к процессору, вытесняя текущую задачу. Внешнее (аппаратное) прерывание1, которое сигнализирует о завершении периферийным устройством операции ввода-вывода, переводит соответствующую задачу в очередь готовых, и выполняется планирование. Внутреннее прерывание сигнализирует об ошибке, которая произошла в результате выполнения активной задачи. Планировщик снимает задачу и выполняет перепланирование. 1 Подробнее о прерываниях читайте в следующем разделе. При возникновении каждого из этих событий планировщик выполняет просмотр очередей и решает вопрос о том, какая задача будет выполняться следующей. Помимо указанных существует и ряд других событий (часто связанных с системными вызовами), требующих перепланировки. Например, запросы приложений и пользователей на создание новой задачи или повышение приоритета уже существующей задачи создают новую ситуацию, которая требует пересмотра очередей и, возможно, переключения процессора. На рис. 4.11 показан фрагмент временной диаграммы работы планировщика в системе, где одновременно выполняются четыре потока. В данном случае неважно, по какому правилу выбираются потоки на выполнение и каким образом изменяются их приоритеты. Существенное значение имеют лишь события, вызывающие активизацию планировщика. Первые четыре цикла работы планировщика, приведенные на рисунке, были инициированы прерываниями от таймера по истечении квантов времени (эти события обозначены на рисунке как Т). Следующая передача управления планировщику была осуществлена в результате выполнения потоком 3 системного запроса на ввод-вывод (событие I/O). Планировщик перевел этот поток в состояние ожидания, а затем переключил процессор на поток 2. Поток 2 полностью использовал свой квант, произошло прерывание от таймера, и планировщик активизировал поток 1. При выполнении потока 1 произошло событие R — системный вызов, в результате которого освободился некоторый ресурс (например, был закрыт файл). Это событие вызвало перепланировку потоков. Планировщик просмотрел очередь ожидающих потоков и обнаружил, что поток 4 ждет освобождения данного ресурса. Этот поток был переведен в состояние готовности, но поскольку приоритет выполняющегося в данный момент потока 1 выше приоритета потока 4, планировщик вернул процессор потоку 1.
Рис. 4.11. Моменты перепланировки потоков В следующем цикле работы планировщик активизировал поток 4, а затем, после истечения кванта и сигнала от таймера, управление получил поток 2. Этот поток не успел использовать свой квант, так как был снят с выполнения в результате возникшей ошибки (событие ER). Далее планировщик предоставлял процессорное время потокам 1, 4 и снова 1. Во время выполнения потока 1 произошло прерывание S от внешнего устройства, сигнализирующее о том, что операция передачи данных завершена. Это событие активизировало работу планировщика, в результате которой поток 3, ожидавший завершения ввода-вывода, вытеснил поток 1, так как имел в этот момент более высокий приоритет. Последний показанный на диаграмме период выполнения потока 1 прерывался несколько раз. Вначале это было прерывание от внешнего устройства (S), затем программное прерывание (R), вызвавшее освобождение ресурса, и, наконец, прерывание от таймера (Т). Каждое из этих трех прерываний вызвало перепланировку потоков. В двух первых случаях планировщик оставил выполняться поток 1, так как в очереди не оказалось более приоритетных потоков, а квант времени, выделенный потоку 1, еще не был исчерпан. Переключение потоков было выполнено только по прерыванию от таймера. В системах реального времени для отработки статического расписания планировщик активизируется по прерываниям от таймера. Эти прерывания пронизывают всю временную ось, возникая через короткие постоянные интервалы времени. После каждого прерывания планировщик просматривает расписание и проверяет, не пора ли переключить задачи. Кроме прерываний от таймера в системах реального времени перепланирование задач может происходить по прерываниям от внешних устройств — различного вида датчиков и исполнительных механизмов. (второй ответ на 20 вопрос)
|
||||
|
|
Последнее изменение этой страницы: 2016-08-12; просмотров: 834; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.138.123.240 (0.012 с.) |