
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Умножение матриц. Согласованные матрицы.Содержание книги
Поиск на нашем сайте
Умножение матриц. Согласованные матрицы. Операция умножения двух матриц вводится только для случая, когда число столбцов первой матрицы равно числу строк второй матрицы. Произведением матрицы Аm*n = (ai,g) на матрицу Вn*p = (bi,k) называется матрица Сm*p = (сi,k) такая, что:
где i= Матрицы А, n*m и В, m*n, назыв. согласованными. (если А согласованно с В, то это не значит, что В согласованно с А). Смысл согласованности в том, чтобы количество столбцов 1-ой матрицы совпадало с количеством строк 2-ой матрицы. Для согласованных матриц можно определить операцию умножения. Если матрицы A и B квадратные и одного размера, то A*B и B*A всегда существуют. Транспонированием называется смена всех элементов столбца соотв элементами строки. Если AT=A, то матрица А наз. симметричная (она обязательно квадратная).
Определителем матрицы А называется число:
Матрица 3-его порядка:
Свойства определителей:
Замечание: АВ 2. 3. пусть А = (аi,j) и при этом ее какой-либо ряд (либо столбец, либо строка) i-я строка обладает свойством, что:
5. определитель = 0, если у него есть два одинаковых (пропорциональных) параллельных ряда. 6. определитель диагональной матрицы равен произведению элементов, стоящих на главной диагонали. 7. определитель треугольной матрицы равен произведению чисел, стоящих на главной диагонали. 8. если в определителях поменять местами, то определитель поменяет знак. 9. если к какому-то ряду определителя прибавить элементы другого параллельного ряда, умноженные на какое-то число (одинаковое), то определитель при этом не изменяется. 10. если какой-то ряд определителя содержит в себе обдщий множитель, то его можно вынести за знак определителя. Теорема о разложении определителя. Теорема Лапласа. Пусть есть определитель n-ого порядка. Зафиксируем число к: 1 В исходном определителе вычеркнем к строк и к столбцов. В результате такой операции все элементы определителя можно отнести к 3-ем разным типам: 1. незачеркнутые 2. 1 раз зачеркнутые 3. дважды зачеркнутые Теперь из дважды зачеркнутых составим определитель. Такой определитель называется минором. Теорема 1: (о разложении определителя): Это теорема лапласа: Определитель равен сумме произведения всевозможных миноров одного и того же порядка к (к<n), ктр. можно составить из произвольно выбранных к параллельных рядов на их алгебраическое дополнение. Наиболее часто на практике применяется случай, когда к=1, тогда Т1 переходит в Т2: Т2 (о разложении определителя по элементам ряда): Обратная матрица. Процедура ее нахождения. Пусть есть матрица А – невырожденная. А-1, A-1*A=A*A-1=E, где E –единичная матрица. A-1 имеет те же размеры, что и A. Алгоритм нахождения обратной матрицы:
аij А* - союзная матрица.
Теорема: (об аннулировании определителя): Невырожденные системы СЛАУ. Способы решения. СЛАУ принято записывать в матричной форме, когда сами неизвестные не указываются, а указывается только матрица системы А и столбец свободных членов В. Решение невырожденных СЛАУ методом Крамера: Х=А-1*В А-1= X1= Теорема: (Крамера):
Прямая на плоскости. Простейшей из линий является прямая. Разным способам задания прямой соответствует в прямоугольной система координат разные виды ее уравнений.
Пусть: tg Число tg Плоскость в пространстве. Простейшей поверхностью является плоскость. Плоскость в пространстве можно задавать различными способами. Каждому из них соответствует определенный вид ее уравнения. 1. Уравнение плоскости, проходящей через данную точку перпендикулярно данному вектору: Точка Мо(Хо, Уо), вектор
2. Уравнение плоскости, проходящей через три данные точки:
3. Нормальное уравнение плоскости: 4. Угол между двумя плоскостями:
5. расстояние от точки до плоскости:
Прямая в пространстве. 1. Канонические уравнения прямой линии в пространстве, или уравнения прямой с направляющими коэффициентами, имеют вид:
где x0, y0, z0 - координаты точки, через которую проходит прямая, а m, n и p - направляющие коэффициенты прямой, которые являются проекциями на координатные оси Ox, Oy, Oz направляющего вектора прямой. 2. В параметрическом виде уравнения прямой линии в пространстве записываются так:
3. Общие уравнения прямой: А1х +B1y + C1z + D1=0 A2x + B2y + C2z + D2=0 4. Векторное уравнение прямой: 5. уравнение прямой в пространстве, проходящей через две точки:
6. угол между прямыми:
Эллипс. Геометрическое место точек, сумма расстояний от которых до двух фиксированных точек плоскости (обычно называемых фокусных) постоянна, называется эллипсом. Если оси координат расположены так, что Ox проходит через фокусы F1(C,0) и F2(-C,0), а О(0,0) совпадает с серед отрезка F1F2, то по F1М+F2M получаем: каноническое ур-ие эллипса b2=-(с2-a2). а и b- полуоси эллипса., а-большая, b-меньшая. Эксцентриситет. (если а<b) Эксцентриситет характеризует выпуклость эллипса. У эллипса эксцентриситет находится: 0 Случай Директрисы (D) Геометрическое место точек, отношение расстояний от которых до точки эллипса к расстоянию от этой точки эллипса до фокуса постоянно и равно величине Примечание: у окружности нет директрисы. Гипербола. Геометрическое место точек, модуль разности расстояний от которых до двух фиксированных точек плоскости постоянна, называется гиперболой. Каноническое уравнение гиперболы: Гипербола есть линия второго порядка. Гипербола имеет 2 асимптоты: Гипербола называется равносторонней, если ее полуоси равны. (а=b). Каноническое уравнение:
Эксцентриситет – отношение расстояния между фокусами к величине действительной оси гиперболы: Так как для гиперболы с>а, то эксцентриситет гиперболы >1. Эксцентриситет характеризует форму гиперболы: Директрисы – прямые Фокальные радиусы: Есть гиперболы, которые имеют общие асимптоты. Такие гиперболы называются сопряженными. Парабола. Парабола – множество всех точек плоскости, каждая из которых одинаково удалена от данной точки, называемой фокусом, и данной прямой, называемой директрисой. Расстояние от фокуса до директрисы – параметр параболы (p>0).- полуфокальный диаметр. Парабола есть линия второго порядка.
М(х,у) – произвольная точка параболы. Соединим точку М с F, проведем отрезок MN перпендикулярно директрисе. Согласно определению параболы MF=MN. По формуле расстояния между 2 точкам находим:
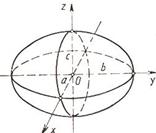
Каноническое уравнение параболы: Эллипсоид. Исследуем поверхность, заданную уравнением:
Рассмотрим сечения поверхности с плоскостями, параллельными плоскости xOy. Уравнения таких плоскостей: z=h,где h – любое число. Линия, получаемая в сечении, определяется двумя ур-ниями:
z=h. Исследуем поверхность: А) если Б) если В) если h=0. Рассмотренные сечения позволяют изобразить поверхность как замкнутую овальную поверхность. Поверхность называется эллипсоидами., если какие-либо полуоси равны, трехосный эллипсоид превращается в эллипсоид вращения, а если а=b=c, то в сферу.
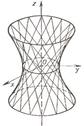
1. Исследуем поверхность
z=h. или z=h полуоси: а1= полуоси достигают своего наименьшего значения при h=0: а1=а, b1=b. При возрастании h полуоси эллипса будут увеличиваться. =>
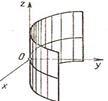
х=0. Анализ этих сечений показывает, что поверхность, определяемая уравнением, имеет форму бесконечной расширяющейся трубки. Поверхность называется однополостным гиперболоидом.
2.
3. Конус второй степени
a = b - конус вращения (прямой круговой).
Сечения конуса плоскостями: в плоскости, пересекающей все прямолинейные образующие, - эллипс; в плоскости, параллельной одной прямолинейной образующей, - парабола; в плоскости, параллельной двум прямолинейным образующим, - гипербола; в плоскости, проходящей через вершину конуса, - пара пересекающихся прямых или точка (вершина). 1. Каноническое уравнение:
p = q - параболоид вращения вокруг оси Oz. Сечения эллиптического параболоида плоскостями - либо эллипс, либо парабола, либо точка. 2.
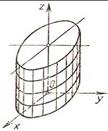
Сечения гиперболического параболоида плоскостями - либо гипербола, либо парабола, либо пара прямых (прямолинейных образующих). Цилиндрические поверхности. Поверхность, образованная движением прямой L, которая перемещается в пространстве, сохраняя постоянное направление и пересекая каждый раз некоторую кривую K, называется цилиндрической поверхностью или цилиндром при этом кривая К – направляющая цилиндра, а L – его образующая. Эллиптический цилиндр
Частным случаем эллиптического цилиндра является круговой цилиндр, его уравнение x2 + y2 = R2. Уравнение x2=2pz определяет в пространстве параболический цилиндр.
Уравнение:
Все эти поверхности называются цилиндрами второго порядка, так как их уравнения есть уравнения второй степени относительно текущих координат x, y, z. Полярная система координат. Точка О называется полюсом, а луч l – полярной осью.
Суть задания какой- либо системы координат на плоскости состоит в том, чтобы каждой точке плоскости поставить в соответствие пару действительных чисел, определяющих положение этой точки на плоскости. В случае полярной системы координат роль этих чисел играют расстояние точки от полюса и угол между полярной осью и радиус– вектором этой точки. Этот угол j называется полярным углом.
Можно установить связь между полярной системой координат и декартовой прямоугольной системой, если поместить начало декартовой прямоугольной системы в полюс, а полярную ось направить вдоль положительного направления оси Ох. Действительные числа. Действительные числа образуют совокупность элементов, обладающую следующими свойствами. Если a и b - действительные числа (алгебраические, рациональные, целые, положительные целые), то таковыми же являются и 1. a + b и ab (замкнутость), 2. a + b = b + a, ab = ba (коммутативность), 3. a + (b + c) = (a + b) + c = a + b + c, a(bc) = (ab)c = abc (ассоциативность 4. a * 1 = a (единица), 5. a(b + c) = ab + ac (дистрибутивность), 6. из a + c = b + c следует a = b, из ca = cb,, следует a = b (сокращение).
Действительное число 0 (нуль) обладает свойствами a + 0 = a, a * 0 = 0 для каждого действительного числа a.
Действительные числа, не являющиеся рациональными, называются иррациональными. Действительными алгебраическими числами называются действительные корни алгебраических уравнений с целочисленными коэффициентами, а действительными трансцендентными числами - остальные действительные числа. Предел последовательности. Число а называется пределом последовательности, если для любого положительного числа Е найдется такое натуральное число N, что при всех n>N выполняется равенство:
Коротко определение предела: Сходящаяся последовательность имеет только один предел. Последовательность, неимеющая предела, называется расходящейся. Если Если
Теорема 1: (необходимый признак числовой последовательности): если последовательность сходится, то она ограничена., если последовательность неограниченна, то она расходится. Теорема Вейерштрасса: сформируем достаточный признак числовой последовательности: всякая ограниченная монотонная последовательность имеет предел. Теорема: если две последовательности {xn}и {yn} сходятся, т.е. имеют конечные пределы, то сходятся также сумма, разность, произведение, частное этих последовательностей, т.е.: Теорема: если Доказательство:
Предел функции. Сформулируем два, эквивалентных между собой, определения предела функции в точке: Определение (по Коши): число А называется пределом функции в точке х0, если для любого положительного Коротко это определение:
Определение (по Гейне): Число А называется пределом функции Односторонние пределы: Предел слева записывают так: Аналогично определяется предел функции справа:
Пределы функции слева и справа называются односторонними пределами. Предел функции при Число А называется пределом функции при
Односторонние пределы.
Предел слева записывают так: Аналогично определяется предел функции справа:
Пределы функции слева и справа называются односторонними пределами. Сравнение бесконечно малых. Две б.м.ф. сравниваются между собой с помощью их отношения: 1. если 2. если 3. если 4. если Таковы же правила сравнения б.м.ф. при Эквивалентные бесконечно малые:
Теоремы о пределах. Теорема: если существует Теорема: если 1) 2) 3) Примечание 1: 1-е и 2-е свойства распространяются на любое конечное число слагаемых или сомножителей, однако число слагаемых и сомножителей не может быть Примечание 2: Теорема: если Следствие: если Теорема: если Теорема (о сжатой переменной): если Теорема (о пределе сложной функции): Пусть: х0,
Сама теорема: Если Дифференциал функции. Пусть функция y = f(x) имеет производную в точке х: Тогда можно записать: Следовательно: Величина aDx- бесконечно малая более высокого порядка, чем f¢(x)Dx, т.е. f¢(x)Dx- главная часть приращения Dу.
Определение. Дифференциалом функции f(x) в точке х называется главня линейная часть приращения функции.
Из определения следует, что dy = f¢(x)Dx или dy = f¢(x)dx. Можно также записать: Свойства дифференциала. Если u = f(x) и v = g(x)- функции, дифференцируемые в точке х, то непосредственно из определения дифференциала следуют следующие свойства:
1) d(u ± v) = (u ± v)¢dx = u¢dx ± v¢dx = du ± dv 2) d(uv) = (uv)¢dx = (u¢v + v¢u)dx = vdu + udv 3) d(Cu) = Cdu Доказательство.
(с учетом того, что если Dx®0, то Du®0, т.к. u = g(x) – непрерывная функция) Тогда Умножение матриц. Согласованные матрицы. Операция умножения двух матриц вводится только для случая, когда число столбцов первой матрицы равно числу строк второй матрицы. Произведением матрицы Аm*n = (ai,g) на матрицу Вn*p = (bi,k) называется матрица Сm*p = (сi,k) такая, что:
где i= Матрицы А, n*m и В, m*n, назыв. согласованными. (если А согласованно с В, то это не значит, что В согласованно с А). Смысл согласованности в том, чтобы количество столбцов 1-ой матрицы совпадало с количеством строк 2-ой матрицы. Для согласованных матриц можно определить операцию умножения. Если матрицы A и B квадратные и одного размера, то A*B и B*A всегда существуют. Транспонированием называется смена всех элементов столбца соотв элементами строки. Если AT=A, то матрица А наз. симметричная (она обязательно квадратная).
Определителем матрицы А называется число:
Матрица 3-его порядка:
Свойства определителей:
Замечание: АВ 2. 3. пусть А = (аi,j) и при этом ее какой-либо ряд (либо столбец, либо строка) i-я строка обладает свойством, что:
5. определитель = 0, если у него есть два одинаковых (пропорциональных) параллельных ряда. 6. определитель диагональной матрицы равен произведению элементов, стоящих на главной диагонали. 7. определитель треугольной матрицы равен произведению чисел, стоящих на главной диагонали. 8. если в определителях поменять местами, то определитель поменяет знак. 9. если к какому-то ряду определителя прибавить элементы другого параллельного ряда, умноженные на какое-то число (одинаковое), то определитель при этом не изменяется. 10. если какой-то ряд определителя содержит в себе обдщий множитель, то его можно вынести за знак определителя.
|
||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-14; просмотров: 611; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.217.241.235 (0.009 с.) |

 ,
, ,
,  , т.е. элемент i-той и k-ого столбца матрицы произведения С равен сумме произведений элементов i-той строки матрицы А на соответствующие элементы к-ого столбца матрицы В.
, т.е. элемент i-той и k-ого столбца матрицы произведения С равен сумме произведений элементов i-той строки матрицы А на соответствующие элементы к-ого столбца матрицы В. - матрица второго порядка.
- матрица второго порядка.
 ВА
ВА


 .
.
 Аij
Аij , A-1 =
, A-1 =  A*Т
A*Т
 , Ак получается из А путем замены к-го столбца на столбец свободного члена В.
, Ак получается из А путем замены к-го столбца на столбец свободного члена В. =k,
=k,  , тогда: y = kx + b.
, тогда: y = kx + b.

 .
.
 .
. .
.

 ,
, , (если а>b)
, (если а>b) .
. =0 возникает только тогда, когда с=0, а это есть случай окружности – это эллипс с нулевым эксцентриситетом.
=0 возникает только тогда, когда с=0, а это есть случай окружности – это эллипс с нулевым эксцентриситетом. , называется директрисами.
, называется директрисами.  .
. , где
, где  .
. и
и 


 . Эксцентриситет равносторонней гиперболы равен равен
. Эксцентриситет равносторонней гиперболы равен равен  .
. .
. и
и  .
. =>
=>  =
=  =>
=> =>
=> то
то  Линия пересечения поверхности с плоскостямиz=h не существует.
Линия пересечения поверхности с плоскостямиz=h не существует. ,
,  линия пересечения вырождается в две точки (0,0,с), и (0,0,-с). Плоскости z = c, z = - c касается данной поверхности.
линия пересечения вырождается в две точки (0,0,с), и (0,0,-с). Плоскости z = c, z = - c касается данной поверхности. , то уравнения можно переписать в виде:
, то уравнения можно переписать в виде:  , как видно, линия пересечения есть эллипс с полуосями а1 =
, как видно, линия пересечения есть эллипс с полуосями а1 =  , b1 =
, b1 =  . При этом, чем меньше h, тем больше полуоси. При н=0 они достигают своих наибольших значений. а1=а, b1=b. Уравнения примут вид:
. При этом, чем меньше h, тем больше полуоси. При н=0 они достигают своих наибольших значений. а1=а, b1=b. Уравнения примут вид:
 . Пересекая поверхностьплоскостью z=h, получим линию пересечения, уравнения которой имеет вид
. Пересекая поверхностьплоскостью z=h, получим линию пересечения, уравнения которой имеет вид
 b1=
b1= 

 -уравнение поверхности.
-уравнение поверхности. и
и  -поверхность, состоящая из 2 полостей, имеющих форму выпуклых неограниченных чаш. Поверхность называется двухполостным гиперболоидом.
-поверхность, состоящая из 2 полостей, имеющих форму выпуклых неограниченных чаш. Поверхность называется двухполостным гиперболоидом.
 Каноническое уравнение:
Каноническое уравнение:
 -это эллиптический параболоид.
-это эллиптический параболоид. (р>0, q>0).
(р>0, q>0).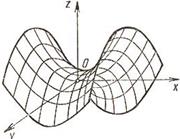 - гиперболический параболоид.
- гиперболический параболоид.
 Эллиптическое уравнение:
Эллиптическое уравнение:
 определяет в пространстве гиперболический цилиндр.
определяет в пространстве гиперболический цилиндр.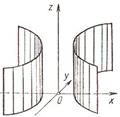

 . В этом случае пишут
. В этом случае пишут  и говорят, что последовательность {xn}имеет предел, равный числу а. говорят,что последовательность сходится к а.
и говорят, что последовательность {xn}имеет предел, равный числу а. говорят,что последовательность сходится к а. .
. =0 => последовательность бесконечно малая.
=0 => последовательность бесконечно малая. => бесконечно большая.
=> бесконечно большая. =>
=>  .
. - окрестности точки а.
- окрестности точки а.  =>
=>  и тд.
и тд. и начиная с некоторого номера выполняется неравенство xn
и начиная с некоторого номера выполняется неравенство xn  yn, то а
yn, то а  т.е.
т.е. . Возьмем
. Возьмем  . Тогда:
. Тогда:  отсюда следует, что xn>yn, это противоречит условию xn
отсюда следует, что xn>yn, это противоречит условию xn  , что для всех х
, что для всех х  , выполняется неравенство
, выполняется неравенство  .
. .
. в точке х0, если для любой последовательности допустимых значений аргумента хn, сходящейся к х0, последовательность соответствующих значений функции
в точке х0, если для любой последовательности допустимых значений аргумента хn, сходящейся к х0, последовательность соответствующих значений функции  ,
,  , сходится к числу А.
, сходится к числу А. >0 существует число
>0 существует число  выполняется неравенство
выполняется неравенство  .
.
 .
. :
: выполняется неравенство
выполняется неравенство 
 , то
, то  называются бесконечно малыми одного порядка.
называются бесконечно малыми одного порядка. то
то  то
то  не существует, то
не существует, то  и
и  .
.
 ,
,  и
и  и они равны между собой, то существует
и они равны между собой, то существует  =
=  ,
,  , то =>
, то =>
 .
. и существуют конечные пределы, когда
и существуют конечные пределы, когда  .
. и существуют конечные пределы
и существуют конечные пределы 
 => существует:
=> существует:  , U=f(x),
, U=f(x),  .
.
 и существуют конечные пределы
и существуют конечные пределы  и
и  , то
, то 
 , где a®0, при Dх®0.
, где a®0, при Dх®0. .
. Обозначается dy или df(x).
Обозначается dy или df(x).

 . Теорема доказана.
. Теорема доказана.


