Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Методы моделирования логических устройствСодержание книги Поиск на нашем сайте Интерактивный диалог в графических программах требует наличия логических устройств ввода - локатора, селектора, валуатора, клавиатуры и кнопок. Однако логическую функцию любого из этих устройств можно реализовать с помощью физического устройства из любого другого класса, хотя не всегда удачно. С другой стороны, не всегда целесообразно, чтобы для каждого логического устройства имелись отдельные физические устройства. Многие распространенные интерактивные графические системы имеют позиционирующие устройства (планшет, мышь) и клавиатуру с функциональными кнопками. С помощью этих трех физических устройств реализуются все логические функции. Ниже представлены логические устройства ввода и возможные физические устройства для их (логических устройств) моделирования. Моделирование локатора Световое перо; Управление курсором с клавиатуры; Управление курсором параметрически с клавиатуры. Ввод координат; Управление курсором мышью Моделирование селектора Выбор курсором объекта; Ввод с клавиатуры имени объекта. Моделирование валуатора Ввод значения на клавиатуре; Работа со шкалой. Моделирование клавиатуры Распознавание литер. Распознавание рукописных текстов; Изображение клавиатуры на дисплее. Моделирование кнопок Меню иерархическое, которое делится на статическое и динамическое; Световые кнопки.
Матричное представление 3D преобразований По аналогии с 2D преобразованиями, которые описываются матрицами 3x3, 3D преобразования могут быть представлены в виде матриц 4x4. И тогда трехмерная точка (X, Y, Z) записывается в однородных координатах как (W*X, W*Y, W*Z, W), где W=/0. Если W=/1 для получения декартовых координат точки (X, Y, Z) первые три ко-ординаты делятся на W. Две точки H1 и H2 в пространстве однородных координат описывают одну и ту же точку 3D пространства только в том случае, если H1=cH2 для любой константы с=/0 Система координат правосторонняя. Перевод каждой положительной полуоси в другую, осуществляется против часовой стрелки.
В машинной графике, часто удобнее использоваться левосторонней системой ко-ординат. Это позволяет легко интерпретировать тот шаг, что точки с большим Z нахо-дятся дальше от наблюдателя.
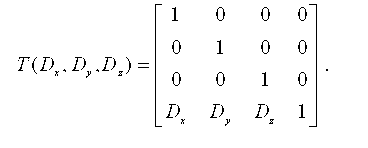
Отметим, что в левосторонней системе координат положительными поворотами будут повороты, выполняемые по часовой стрелке. Трехмерный перенос Трехмерный перенос является простым расширением двумерного:
Масштабирование
Поворот Двумерный поворот, описанный ранее, является в тоже время трехмерным пово-ротом вокруг оси Z. В 3D поворот относительно Z описывается следующим образом:
Это легко проверить: в результате поворота на 90гр. вектора [1 0 0 1], являющегося единичным вектором оси X, должен получиться единичный вектор оси Y [0 1 0 1]. Вычисляя произведение
получаем предсказанный результат. Матрица поворота вокруг оси X имеет вид
Матрица поворота вокруг оси Y записывается в виде
Композиция 3D преобразований Объединением элементарных 3D преобразований можно получить сложные пре-образования, выполняемые над объектами в моделируемой сцене. Пример сложного преобразования рассмотрим на практической задаче. Задача: Преобразовать отрезки [P1P2] и [P1P3] из начальной позиции в конечную. P1 в начало координат, P1P2 вдоль оси Z, P1P3 в плоскости YOZ, где ось Y положительна. На длины отрезков преобразования не влияют.
Этапы решения: 1. Перенос точки P1 в начало координат. 2. Поворот вокруг оси Y до совмещения P1P2 c плоскостью YOZ. 3. Поворот вокруг оси X до совмещения P1P2 c отрицательным Z. 4. Поворот вокруг оси Z до совмещения P1P3 c плоскостью YOZ. Шаг 1. Перенос P1 в 0
Применение переноса к P1, P2, P3 дает следующие результаты:
Шаг 2. Поворот вокруг оcи Y. Поворот на положительный угол 0 для которого:
Подставим эти выражения в матрицу Ry(0), тогда
Как и ожидалось x-компонента P2''=0. Шаг 3. Поворот вокруг оси X. Рисунок после второго шага.
Шаг 4. Рисунок после шага 3.
|
||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 367; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.214 (0.008 с.) |