
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Расчет статических характеристик АЭПСодержание книги
Поиск на нашем сайте
В режиме динамического торможения
Выражение для механической характеристики АД в режиме динамического торможения имеет вид, аналогичный формуле Клосса, а кривая, ею описываемая, имеет характерную точку критического момента:
где:
где:
где:
где: Тогда, задаваясь отношением
Действующее значение эквивалентного переменного тока для двух схем:
Данные расчета в режиме динамического торможения приведены в таблице 6,а характеристики АД показаны на рисунке 6.
Таблица 6. – Механические характеристики АД с фазным ротором в режиме динамического торможения
Рисунок 6. – Механические характеристики АД с фазным ротором в режиме динамического торможения Таблица 7. – Исходные данные к задаче 2
Технические данные асинхронных двигателей с короткозамкнутым ротором
Примечание:
Для студентов дневной формы обучения вариант выбирается в соответствии с номером журнала учебной группы.
Задача 2 Пример расчета АД с короткозамкнутым ротором В задаче требуется: 1 Рассчитать рабочие характеристики асинхронного двигателя (АД) и построить зависимости частоты вращения 2 Расчет следует выполнить для значений скольжения 3 Для каждой величины скольжения нужно определить [1]: величины тока холостого хода - активные - реактивные - действующие величины тока статора - активные - реактивные - действующие величины тока ротора - активные - реактивные - действующие величины мощности - потребляемую - преобразованную - полезную коэффициенты мощности
КПД
частоту вращения ротора
момент на валу
Исходные данные к задаче 2 приведены в таблице 4. Вариант № 39
Номинальная мощность на валу Р2н, Вт 15000 Номинальное линейное напряжение U1н, В 380 Синхронная угловая частота n1н, об/мин 1500 КПД η, о.е. 0,89 Коэффициент мощности cosφ1н, о.е. 0,63 Активное сопротивление цепи намагничивания r*m, о.е. 0,15 Индуктивное сопротивление цепи намагничивания х*m, о.е. 3,8
Активное сопротивление обмотки статора r*1, о.е. 0,026 Приведенное активное сопротивление обмотки ротора r*/2, о.е. 0,034 Индуктивное сопротивление обмотки статора х*1, о.е. 0,105 Приведенное индуктивное сопротивление обмотки ротора х*/2, о.е. 0,13 Механические потери мощности Рмех, Вт 100
Для расчёта используем Г-образную схему замещения асинхронного двигателя с вынесенным намагничивающим контуром:
Рисунок 7. – Г-образная схема замещения асинхронной машины:
Для данной схемы замещения определим номинальные фазные напряжения и фазные токи, а также поправочный коэффициент 1 Фазное напряжение, В:
2 Потребляемая мощность, Вт:
3 Фазный ток статора, А:
Заданные относительные значения сопротивлений переводим в омические.
4 Коэффициент перевода электрических параметров из относительных единиц в омические, Ом:
5 Активное сопротивление цепи намагничивания, Ом:
6 Индуктивное сопротивление цепи намагничивания, Ом:
7 Активное сопротивление фазы обмотки статора, Ом:
8 Индуктивное сопротивление фазы обмотки статора, Ом:
9 Приведённое активное сопротивление фазы обмотки ротора, Ом:
10 Приведённое индуктивное сопротивление фазы обмотки ротора, Ом:
11 Полное активное сопротивление контура намагничивания, Ом:
12 Полное индуктивное сопротивление контура намагничивания, Ом:
13 Полное эквивалентное сопротивление контура намагничивания, Ом:
14 Коэффициент мощности, о.е.:
15 Синус угла
16 Действующее значение тока холостого хода статора, А:
17 Активная составляющая тока холостого хода, А:
18 Реактивная составляющая тока холостого хода, А:
19 Поправочный коэффициент:
Далее, задавшись значениями скольжения 20 Приведённое активное сопротивление фазы обмотки ротора, Ом:
21 Эквивалентное активное сопротивление рабочего контура, Ом:
22 Добавочное приведённое активное сопротивление в цепи ротора:
23 Приведённое индуктивное сопротивление рабочего контура, Ом:
24 Полное приведённое сопротивление рабочего контура, Ом:
25 Коэффициент мощности, о.е.:
26 Действующее значение тока ротора, А:
27 Активная составляющая тока ротора, А:
28 Реактивная составляющая тока ротора, А:
29 Активная составляющая тока статора, А:
30 Реактивная составляющая тока статора, А:
31 Действующее значение тока статора, А:
32 Коэффициент мощности, о.е.:
33 Преобразованная мощность, Вт:
34 Добавочные потери, Вт:
35 Полезная мощность на валу двигателя, Вт:
36 Потребляемая мощность, Вт:
37 Частота вращения ротора, об/мин:
38 Момент на валу двигателя, Н·м:
39 КПД двигателя, о.е.:
Все расчеты сводятся в таблицу 8, а рабочие характеристики представлены на рисунке 8.
Таблица 3. – Данные расчета рабочих характеристик АД
Рисунок 8. – Рабочие характеристики АД БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Копылов, И. П. Электрические машины: учеб. для вузов / И.П. Копылов. – 2-е изд., перераб. – М.: Высш. шк.: Логос, 2005. – 607 с: ил. 2. Вольдек, А. И. Электрические машины. Введение в электромеханику. Машины постоянного тока и трансформаторы: учеб. для вузов / А.И. Вольдек, В.В. Попов. – М.; СПб.: Питер, 2007. – 319 с.: ил. 3. Овсянников Е.М. Электрический привод: учебник / Е.М. Овсянников. – М.: ФОРУМ, 2011. – 224 с.: ил. 4. Кисаримов Р.А. Электропривод: Справочник. – М.: ИП «РадиоСофт», 2010. – 352 с.: ил. 5. М.Ю. Пустоветов, А.В. Чубукин, М.П. Фуражировский. Статические и динамические расчеты электроприводов: Метод. указания к курсовому проектированию по дисциплине «Теория электропривода» / РГАСХМ ГОУ, Ростов н/Д, 2005. – 60 с.
Учебное издание
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 225; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.141.201.114 (0.007 с.) |

 , (26)
, (26) – относительная скорость:
– относительная скорость: ; (27)
; (27) – аналог критического скольжения для режима динамического торможения:
– аналог критического скольжения для режима динамического торможения: , (28)
, (28) – индуктивное сопротивление ветви намагничивания АД:
– индуктивное сопротивление ветви намагничивания АД: , (29)
, (29) – величина тока холостого хода;
– величина тока холостого хода; ;
; ;
; – критический момент в режиме динамического торможения:
– критический момент в режиме динамического торможения: , (30)
, (30) – действующее значение эквивалентного переменного тока, А. Для различных схем включения обмоток статора АД в сеть постоянного (выпрямленного) напряжения вычисляется по различным соотношениям.
– действующее значение эквивалентного переменного тока, А. Для различных схем включения обмоток статора АД в сеть постоянного (выпрямленного) напряжения вычисляется по различным соотношениям. , определим величину фактически протекающего в статоре постоянного тока:
, определим величину фактически протекающего в статоре постоянного тока: ; (31)
; (31) .
. ; (32)
; (32) ; (33)
; (33) ;
; ;
; ;
; :
: ;
; .
.
 кВт
кВт
 В
В
 об/мин
об/мин
 о.е.
о.е.
 о.е.
о.е.
 о.е.
о.е.
 о.е.
о.е.
 о.е.
о.е.

 о.е.
о.е.

 кВт
кВт
 , вращающего момента
, вращающего момента  , тока обмотки статора
, тока обмотки статора  , коэффициента мощности
, коэффициента мощности  и коэффициента полезного действия (КПД)
и коэффициента полезного действия (КПД)  : (
: ( .
.
 ,
, ,
, ;
; ,
, ,
, ,
, ,
, ;
; ,
, ;
;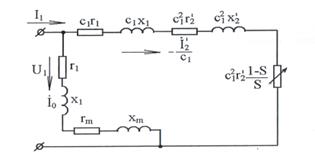
 – активное сопротивление фазы обмотки статора;
– активное сопротивление фазы обмотки статора;  – индуктивное сопротивление фазы обмотки статора;
– индуктивное сопротивление фазы обмотки статора;  – приведённое активное сопротивление фазы обмотки ротора;
– приведённое активное сопротивление фазы обмотки ротора;  – приведённое индуктивное сопротивление фазы обмотки ротора;
– приведённое индуктивное сопротивление фазы обмотки ротора;  – активное сопротивление цепи намагничивания;
– активное сопротивление цепи намагничивания;  – индуктивное сопротивление цепи намагничивания;
– индуктивное сопротивление цепи намагничивания;  – скольжение;
– скольжение;  – комплексный коэффициент;
– комплексный коэффициент;  – намагничивающий ток;
– намагничивающий ток;  – приведенный ток ротора;
– приведенный ток ротора;  – напряжение питающей сети
– напряжение питающей сети , учитывая, что обмотка статора соединена по схеме «звезда».
, учитывая, что обмотка статора соединена по схеме «звезда». ; (34)
; (34)
 ; (35)
; (35)
 (36)
(36)
 ; (37)
; (37)
 ; (38)
; (38)
 ; (39)
; (39)
 ; (40)
; (40)
 ; (41)
; (41)
 ; (42)
; (42)
 ; (43)
; (43)
 ; (44)
; (44)
 ; (45)
; (45)
 ; (46)
; (46)
 ; (47)
; (47)
 , о.е.:
, о.е.: ; (48)
; (48)
 ; (49)
; (49)
 ; (50)
; (50)
 ; (51)
; (51)
 ; (52)
; (52)
 , указанными в задании, рассчитываем величины, приведенные в таблице 8.
, указанными в задании, рассчитываем величины, приведенные в таблице 8. . (53)
. (53) . (54)
. (54) . (55)
. (55) . (56)
. (56) . (57)
. (57) . (58)
. (58) . (59)
. (59) . (60)
. (60) . (61)
. (61) . (62)
. (62) . (63)
. (63) . (64)
. (64) . (65)
. (65) . (66)
. (66) . (67)
. (67) . (68)
. (68) . (69)
. (69) . (70)
. (70) . (71)
. (71) . (72)
. (72)



















