Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Способы построения процессорных устройств.
Классификация Цифровых устройств с памятью. Основные понятия.
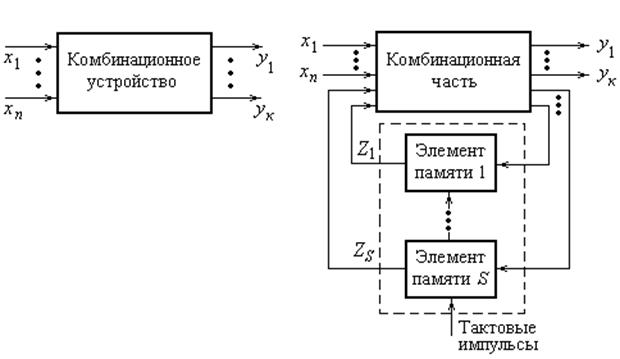
В общем случае на вход цифрового устройства поступает множество двоичных переменных X(x1 … xn), а с выхода снимается множество двоичных переменных Y(y1… yk),. Устройство при этом осуществляет определенную логическую функцию между входными и выходными переменными. Цифровые устройства можно разделить на комбинационные и последовательностные. В комбинационных – значения Y в течение каждого такта определяются только значениями X в этом же такте. Такие устройства состоят из логических элементов. В последовательностных – значения Y определяются значениями X, как в течение рассматриваемого такта, так и существовавшими в ряде предыдущих тактов. Для этого в последовательностных устройствах, кроме логических должны быть еще и запоминающие элементы. Структура последовательностного устройства Рис.1.1.1 Структура комбинационного устройства Рис.1.1.2
Рис.1.1.1 Рис.1.1.2
Запоминающее устройство может хранить информацию не бесконечно большого, а только ограниченного числа тактов, поэтому цифровые устройства с памятью называют конечными автоматами, к которым относят все ЭВМ. Таблицы, показывающие взаимосвязь между входными и выходными переменными комбинационных устройств, называют таблицами истинности. Алгебраическая форма этих связей представляет систему уравнений y1 = y1 (x1, x2, …, xn), yk = yk (x1, x2, …, xn). В общем виде в последовательностных устройствах выходные переменные yi зависят не только от входных сигналов xm, но и от сигналов элементов памяти, поступающих за этот же такт. В частности, в автоматах Мили выходные сигналы формируются именно таким образом, т. е. yi t+1 = fi (x1, x2, …, xn, z1, z2, …, zs)t+1. Это выражение называется функцией выхода автомата Мили. В автоматах Мура выходные сигналы являются функциями только сигналов элементов памяти в этом же такте, т.е. yi t+1 = fi (z1, z2, …, zs)t+1. Это выражение называется функцией выхода автомата Мура. Для описания работы последовательностных устройств используются таблицы переходов состояний. Таблицы истинности соответствуют только статическим или установившимся режимам работы цифровых устройств. При изменении входных сигналов в комбинационной схеме из-за инерционности логических элементов в ней начинает протекать переходный процесс. Максимальная длительность переходного процесса определяется максимальным числом последовательно включенных ЛЭ. Входные сигналы xm изменяются не мгновенно, а в течение некоторого времени фф, т. е. сигналы имеют фронты конечной длительности. В течение этого времени входные сигналы имеют неопределенное значение. По этой причине, а также из-за задержек сигналов в ЛЭ выходные сигналы комбинационной схемы в течение переходного процесса могут принимать значения не соответствующие описывающим их функциям. Это явление называют переходными состояниями или “гонками”. Появление кратковременных ложных значений выходных сигналов комбинационной схемы может привести к неправильному срабатыванию других схем, подключенных к ее выходам. Цифровые устройства можно разделить на асинхронные и синхронные. В асинхронных изменение входных сигналов сразу же вызывает изменение выходных сигналов. В синхронных изменение выходных сигналов, соответствующее новому сочетанию входных, происходит только после подачи синхронизирующих (тактовых) импульсов, управляющих работой автомата. Период синхроимпульсов является, таким образом, минимальным
временем между выполнением автоматом двух последовательных микроопераций, т.е. служит единицей машинного времени, называемой тактом. В зависимости от структуры автомата за один такт могут выполняться одна или несколько микроопераций, если они совмещены во времени. В асинхронных устройствах отсутствуют синхронизирующие сигналы, поэтому в их структуры обычно включаются специальные схемы, которые после окончания каждой микрооперации вырабатывают сигнал готовности к выполнению следующей микрооперации. Синхронные устройства, в принципе, имеют меньшее быстродействие, чем асинхронные, однако в них легко устраняются опасные состязания.
Кодирование состояний
Из состояния ЦУ будут фиксироваться в регистре состояний в виде двоичного кода, т.к ЦУ имеет и записывает сколько состояний, то для представления каждого состояния в двоичном коде достаточно 3-х разрядов, поэтому регистр состояний будет строиться на 3-х триггерах. Соответствие между состоянием ЦУ и двоичным кодом который будет фиксироваться в регистре, покажем в таблице состояний (табл.2.3.1 )
Таблица состояний.
Табл.2.3.1
Q 1, Q 2, Q 3 - это выходы триггеров Т1,Т2,Т3 на котором построен регистр состояний. Согласно заданию регистр состояний будем строить на Д-триггерах. Для обеспечения фиксации двоичного кода вновь сформированного состояния. Комбинационная схема должна сформировать соответствующие сигналы на входах триггера. Соответствие между типом перехода триггера и уровнями сигналов которые должны быть сформированы на входах покажем в Словаре D-триггера (табл.2.3.2)
Словарь D-триггера. Табл.2.3.2
Классификация Цифровых устройств с памятью. Основные понятия.
В общем случае на вход цифрового устройства поступает множество двоичных переменных X(x1 … xn), а с выхода снимается множество двоичных переменных Y(y1… yk),. Устройство при этом осуществляет определенную логическую функцию между входными и выходными переменными. Цифровые устройства можно разделить на комбинационные и последовательностные. В комбинационных – значения Y в течение каждого такта определяются только значениями X в этом же такте. Такие устройства состоят из логических элементов. В последовательностных – значения Y определяются значениями X, как в течение рассматриваемого такта, так и существовавшими в ряде предыдущих тактов. Для этого в последовательностных устройствах, кроме логических должны быть еще и запоминающие элементы. Структура последовательностного устройства Рис.1.1.1 Структура комбинационного устройства Рис.1.1.2
Рис.1.1.1 Рис.1.1.2
Запоминающее устройство может хранить информацию не бесконечно большого, а только ограниченного числа тактов, поэтому цифровые устройства с памятью называют конечными автоматами, к которым относят все ЭВМ. Таблицы, показывающие взаимосвязь между входными и выходными переменными комбинационных устройств, называют таблицами истинности. Алгебраическая форма этих связей представляет систему уравнений y1 = y1 (x1, x2, …, xn), yk = yk (x1, x2, …, xn). В общем виде в последовательностных устройствах выходные переменные yi зависят не только от входных сигналов xm, но и от сигналов элементов памяти, поступающих за этот же такт. В частности, в автоматах Мили выходные сигналы формируются именно таким образом, т. е. yi t+1 = fi (x1, x2, …, xn, z1, z2, …, zs)t+1. Это выражение называется функцией выхода автомата Мили. В автоматах Мура выходные сигналы являются функциями только сигналов элементов памяти в этом же такте, т.е. yi t+1 = fi (z1, z2, …, zs)t+1. Это выражение называется функцией выхода автомата Мура. Для описания работы последовательностных устройств используются таблицы переходов состояний. Таблицы истинности соответствуют только статическим или установившимся режимам работы цифровых устройств. При изменении входных сигналов в комбинационной схеме из-за инерционности логических элементов в ней начинает протекать переходный процесс. Максимальная длительность переходного процесса определяется максимальным числом последовательно включенных ЛЭ. Входные сигналы xm изменяются не мгновенно, а в течение некоторого времени фф, т. е. сигналы имеют фронты конечной длительности. В течение этого времени входные сигналы имеют неопределенное значение. По этой причине, а также из-за задержек сигналов в ЛЭ выходные сигналы комбинационной схемы в течение переходного процесса могут принимать значения не соответствующие описывающим их функциям. Это явление называют переходными состояниями или “гонками”. Появление кратковременных ложных значений выходных сигналов комбинационной схемы может привести к неправильному срабатыванию других схем, подключенных к ее выходам. Цифровые устройства можно разделить на асинхронные и синхронные. В асинхронных изменение входных сигналов сразу же вызывает изменение выходных сигналов. В синхронных изменение выходных сигналов, соответствующее новому сочетанию входных, происходит только после подачи синхронизирующих (тактовых) импульсов, управляющих работой автомата. Период синхроимпульсов является, таким образом, минимальным
временем между выполнением автоматом двух последовательных микроопераций, т.е. служит единицей машинного времени, называемой тактом. В зависимости от структуры автомата за один такт могут выполняться одна или несколько микроопераций, если они совмещены во времени. В асинхронных устройствах отсутствуют синхронизирующие сигналы, поэтому в их структуры обычно включаются специальные схемы, которые после окончания каждой микрооперации вырабатывают сигнал готовности к выполнению следующей микрооперации. Синхронные устройства, в принципе, имеют меньшее быстродействие, чем асинхронные, однако в них легко устраняются опасные состязания.
Способы построения процессорных устройств.
Процессорное устройство (процессор) предназначен для непосредственной обработки информаций и организаций программного управления процессом обработки. Процессор синтезируется в виде двух ус-тв операционного (ОУ) и управляющего (УУ). Задача УУ заключается в формирований последовательности микроопераций необходимой для исполнения операций предписанной поступившим из ОП командой. Назначение ОУ выполнение этих микроопераций с поступившими из памяти операндами. В качестве узлов ОУ содержит ряд регистров сумматоры, каналы передачи информаций, мультиплексоры, для коммутаций этих каналов. Выполнив операцию ОУ формирует признаки исполнения, которые поступают в УУ, результат операций отсылается в память УУ с учетом признаком исполнения предыдущей операции, формирует новую последовательность микроопераций для следующей поступившей из памяти команды.
Процессорное устройство.
Рис.1.2
Существуют 2 принципиально разных принципа организаций исполнения команд т.е. 2 подхода к проектированию УУ: принцип схемный или «жесткой» логики и принцип микропрограммируемой или «гибкой» логики.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 357; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.96 (0.007 с.) |