Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исследование системы автоматического регулированияСодержание книги
Поиск на нашем сайте ГБПОУ «ПОВОЛЖСКИЙ ГОСУДАРСТВЕННЫЙ КОЛЛЕДЖ»
КУРСОВОЙ ПРОЕКТ ИССЛЕДОВАНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МДК.01.03. Теоретические основы контроля и анализа функционирования систем автоматического управления
220703 Автоматизация технологических процессов и производств (по отраслям)
Студент подпись Н.Ю. Храмов 00.00.0000 г. Оценка выполнения и защиты курсового проекта ____________
Руководитель подпись Т.С. Чеснокова 00.00.2016 г
Самара, 2016 СОДЕРЖАНИЕ
ВВЕДЕНИЕ Тема курсового проекта: Исследование системы автоматического регулирования Актуальность темы: определяется тем, что умение составлять схемы САУ и осуществлять их контроль является важной необходимостью для современного производства, особенно в условиях импортозамещения производства. Выше изложенное в целом на теоретико-методологическом уровне определило проблему настоящего исследования: выявление условий оценки устойчивости и качества САУ. Недостаточная разработанность указанной проблемы и ее большая практическая значимость определили тему исследования: «оценка устойчивости и качества системы автоматического управления». Цель исследования: проанализировать схему САУ. Объект исследования: устойчивость и качество САУ. Предмет исследования: оценка устойчивости и качества системы. Гипотеза исследования: устойчивость и качество САУ определяют работоспособность системы. Задачи исследования: 1. Разработать систему автоматического управления. 2. Определить устойчивость системы автоматического управления. 3. Определить качество системы автоматического управления.
Теоретическая значимость: изучены методики оценки устойчивости и качества САУ Практическая значимость: приобретен навык проведения анализа САУ; расчета параметров типовых схем. Методы исследования: построение характеристик; определение передаточных функций; оценка устойчивости и качества системы.
Раздел 1.Исходные данные для курсового проекта
Рисунок 1. Схема структурная. Где ОР – объект регулирования, ИМ – исполнительный механизм, Д – датчик, К – усилитель, Р – регулятор, 3 – задающий элемент.
Регулятор Статическая характеристика Передаточная функция Y = Датчик Статическая характеристика Передаточная функция Y = Исполнительный механизм Статическая характеристика Передаточная функция Y = Основные параметры переходного процесса в следующих пределах: Перерегулирование – Затухание – Колебательность – Статическая характеристика датчика. Статическая характеристика датчика описывается уравнением: Y = Подставить вместо N свой порядковый номер(16): Y = Для построения характеристики определить точки: По этим значениям построить статическую характеристику датчика:
Рисунок 3.
Статическая характеристика регулятора
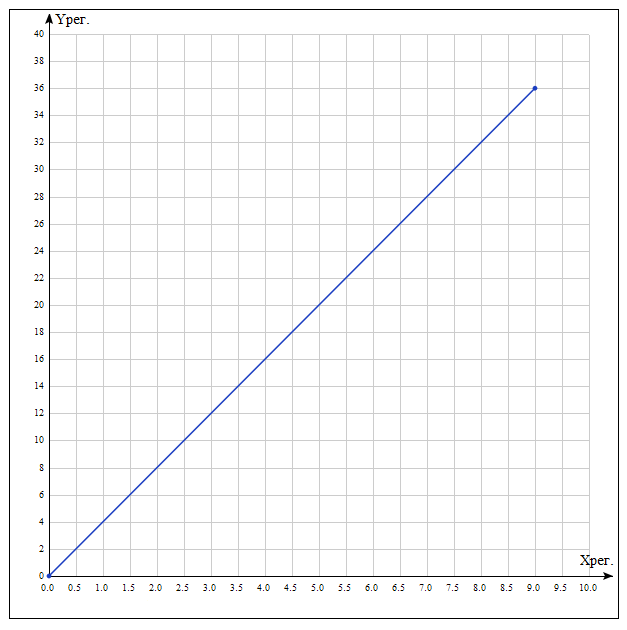
Статическая характеристика регулятора описывается уравнением: Y = Подставить вместо N свой порядковый номер (16): Y = Для построения характеристики определим точки: По этим точкам построить статическую характеристику регулятора:
Рисунок 4. Раздел 3. Статические характеристики системы. Рабочая точка. Динамический коэффициент регулирования. Координаты рабочей точки Определить координаты рабочей точки. Для определения координат рабочей точки системы привести структурную схему в виде двух элементов, с целью определения взаимосвязи регулирующих параметров. Поскольку статические характеристики представляются прямыми линиями, то необходимо найти точку пересечения двух прямых. Эти прямые задаются уравнениями устойчивости из представленных расчетов:
Вместо N подставить свой порядковый номер ().
Координаты рабочей точки:
4. Преобразование статических характеристик Определить аналитическое выражение режима работы регулирующей системы, осуществив преобразование статических характеристик датчика, регулятора и исполнительного механизма: уравнение для объекта регулирования: уравнение для датчика: уравнение для регулятора: уравнение для исполнительного механизма: Из структурной схемы следует, что Yд = Xр ; Yр = Xи.м. Подставить уравнение датчика в уравнение регулятора. Результирующее уравнение подставить в уравнение для исполнительного механизма.
В уравнение для регулятора подставить вместо N свой порядковый номер. ()
Упростить выражение, подставив вместо N свой порядковый номер. ().
Подставить значение выражения в уравнение исполнительного механизма:
Полученное выражение является статической характеристикой цепи обратной связи, полученной аналитическим способом. Оно также описывает статическую характеристику цепи обратной связи, полученную ранее графическим способом.
Устойчивость системы Устойчивость системы – это свойство возвращаться к состоянию установившегося равновесия, после устранения возмущения, нарушившего равновесие. Устойчивость является необходимым условием работоспособности системы. Система неустойчива, если после снятия возмущения выходная величина неограниченно удаляется от первоначально установившегося режима. Если график переходного процесса сходящийся, то система устойчива, а если расходящийся то система неустойчива. Устойчивость системы характеризуется ее свободными движениями. Свободные движения системы описываются однородными дифференциальными уравнениями, т.е. уравнениями без правой части. Для определения устойчивости системы исследуется уравнение. Встречаются различные комбинации корней. Если характеристическое уравнение имеет только вещественные и неравные корни, то с течением времени система будет удаляться от положения равновесия, т.е. будет неустойчивой. Если характеристическое уравнение имеет пару комплексных сопряженных корней, то процесс будет затухать. При наличии пары чисто мнимых корней в системе возникают незатухающие гармонические колебания, система находится на границе устойчивости. Если характеристическое уравнение имеет один нулевой корень, а все остальные корни вещественные и отрицательные, то система имеет множество состояний равновесия. Для устойчивости необходимо, чтобы все вещественные корни характеристического уравнения были отрицательны, а комплексные корни имели отрицательную вещественную часть.
Рисунок 7 (расположение корней характеристического уравнения на комплексной плоскости) Исследуемая система является устойчивой (не устойчивой),так как корни характеристического уравнения находятся в??? ЗАКЛЮЧЕНИЕ В результате проведенного исследования системы автоматического управления проанализирована схема системы автоматического управления. Произведена оценка устойчивости и качества САУ. По результатам расчетов система является устойчивой. И такой технический параметр, как время регулирования*.. и коэффициент качества системы говорит о том, что элементы цепи обратной связи в системе выбраны оптимальным образом и создают благоприятные условия для работы системы.
Нормативные материалы
1... 2... Научные, технические и учебно-методические издания
Основная литература: 1 Теория автоматического управления /Под ред. Нетушила А.В. - М: Высшая школа, 1983. 2 Клюев А.С. Автоматическое регулирование. - М.: Высшая школа, 1986. Дополнительная 1 Глинков Г.М., Климовицкий М.Д. Теоретические основы автоматического управления металлургическими процессами. - М.: Металлургия, 1986. 2 Проектирование систем контроля и автоматического регулирования металлургических процессов /Под ред. Глинкова Г.М. - М.: Металлургия, 1986. 3 Шишмарев В.Ю - Автоматика 4 Гальперин М.В -Автоматическое управление 5 Горошков Б.И.- Автоматическое управление 6 Шишмарев В.Ю.- Автоматизация технологических процессов 7 Кисаримов Р.А. — Практическая автоматика 8 Брюханов,В.Н., Схиртладзе А.Г., Вороненко В.П.— Автоматизация производства 9 ГоловенковС,Н., Сироткин С,В. -Основы автоматики и автоматического регулирования 10 Спрыгин В.В.— Основы автоматики и вычислительной техники
Ресурсы сети Интернет 3... 4... 5... 6... ГБПОУ «ПОВОЛЖСКИЙ ГОСУДАРСТВЕННЫЙ КОЛЛЕДЖ»
КУРСОВОЙ ПРОЕКТ ИССЛЕДОВАНИЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МДК.01.03. Теоретические основы контроля и анализа функционирования систем автоматического управления
220703 Автоматизация технологических процессов и производств (по отраслям)
Студент подпись Н.Ю. Храмов 00.00.0000 г. Оценка выполнения и защиты курсового проекта ____________
Руководитель подпись Т.С. Чеснокова 00.00.2016 г
Самара, 2016 СОДЕРЖАНИЕ
ВВЕДЕНИЕ
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-08-01; просмотров: 336; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.217.27 (0.007 с.) |


 * x W(p) =
* x W(p) = 
 – x W(p) =
– x W(p) = 
 W(p) =
W(p) = 
 – x
– x ;
;  =
=  =
= 
 * x
* x ;
;