Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Перечень контрольных вопросов к зачётуСодержание книги
Поиск на нашем сайте
Перечень контрольных вопросов к зачёту По курсу «Автоматизированные системы управления атомных электростанций».
Система – это множество элементов и отношений между ними. Вполне аналогичные концепции, но связанные не с общесистемными исследованиями, а рассматривающие информационные процессы в системах, таких, как связь и управление, были сформулированы в конце 40-х — начале 50-х гг. и получили название «кибернетика». Кибернетика, которую Винер определил как исследование «связи и управления в животном и ма шине», основывается на понимании того, что связанные с информацией проблемы можно вполне содержательно и успешно изучать, по крайней мере, до некоторого предела, независимо от определенного контекста. Колмогоров так определяет кибернетику: «Кибернетика занимается изучением систем любой природы, способных воспринимать, хранить и преобразовывать информацию и использовать ее для управления и регулирования». Берталанфи включил кибернетику в теоретическую часть общей теории систем (ОТС). Техническим фундаментом кибернетики стала автоматика - техническая наука, разрабатывающая принципы построения автоматических систем и необходимых для них автоматических средств (элементов), методы анализа и синтеза этих систем. Автоматика состоит из двух частей: теории автоматического регулирования и управления и технических средств построения автоматических систем. Теория автоматического регулирования и управления — это наука о принципах построения автоматических систем и закономерностях протекающих в них процессов. Основная задача этой науки состоит в построении оптимальных или близких к ним автоматических систем, а также в исследовании статики и динамики этих систем. Однако автоматика всегда распространялась, главным образом, на физическую сферу деятельности человека, на замену и повторение простейших движений его тела и конечностей.
Теоретические основы автоматического и автоматизированного управления.
По примеру акад. А. И. Берга (1961, 1964 г), мы разобьем всю область кибернетических исследований три главные части: 1) общую, или теоретическую, кибернетику, которая имеет дело с общими математическими моделями управления и представляет собою по существу математическую или физико-математическую дисциплину; 2) техническую, или инструментальную, кибернетику, которая заботится о техническом осуществлении и техническом моделировании управления; 3) ряд прикладных ветвей, занимающихся управлением в частных областях и выступающих под названиями кибернетики биологической, медицинской, экономической, военной, психологической, педагогической и т. Общая кибернетика, несмотря на ряд попыток систематизации, остается еще во многом фрагментарной. (ней относят, например, такие разделы, как теория информации, теория следящих систем (сервомеханизмов), теория конечных автоматов и т. п., но их не всегда легко связать между собою.) Техническая кибернетика продолжает традиции классической автоматики; ее главное оружие — электронные вычислительные (они же логические) машины. Она заслуживает выделения среди других применений общей кибернетики потому, что сама является универсально применимой; с ее помощью автоматизируется управление в различных областях. Технические термины, такие, как «машина», «автомат», «регулятор», часто употребляются и в общей кибернетике, но там они приобретают более широкое и отвлеченное значение. Прикладные отрасли, постоянно умножающиеся в числе, придают кибернетическим исследованиям их неоднократно отмеченный комплексный, междисциплинарный характер. Большинство этих частных теорий управления существовало и прежде, по крайней мере, в зачатке, но теперь они получили в свое распоряжение единый язык и общий аппарат. Общий подход повышает эффективность управления, облегчает выбор оптимальных альтернатив. В этом практическом плане кибернетика предстает перед нами как техника наиуспешнейшего достижения целей, как искусство получать максимальные результаты минимальной ценой.. Кибернетика может также воспользоваться методами двух родственных научных направлений, возникших почти одновременно с нею, в те же военные и послевоенные годы. Речь идет об исследовании операций и системном анализе, некоторые считают их прямо ветвями кибернетики.
Управление – это такая организация того или иного процесса, которая обеспечивает достижение определённых целей. Совокупность всех устройств, обеспечивающих управление каким-либо объектом, называется системой управления. Если функции всех элементов системы управления выполняются различными устройствами без непосредственного участия человека, то система управления называется автоматической. Система управления, в которой решения об управляющих действиях принимаются людьми, а автоматические устройства используются только для сбора, обработки и представления информации о задачах и результатах управления и для сравнительного анализа возможных вариантов решений, называется автоматизированной. АСУ технологического процесса (АСУ ТП) – это автоматизированная система управления для выработки и реализации управляющих воздействий на технологический объект управления в соответствии с принятым критерием качества управления. Технологический объект управления – это совокупность технологического оборудования и реализованного на нём по соответствующим инструкциям или регламентам технологического процесса производства.
Структурная схема централизованной АСУ ТП.
Иерархией назовем структуру с наличием подчиненности, т. е. неравноправных связей между элементами, когда воздействия в одном из направлений оказывают гораздо большее влияние на элемент, чем в другом. Типичная иерархическая связь с воздействиями вида «информация» и «управление» изображена на рис. 2.1.
Рис. 2.1. Пример открытой направленной системы с иерархической структурой вида «информация, управление – информация».
Виды иерархических структур разнообразны. Но основных, важных для практики иерархически структур всего две — древовидная (веерная) и ромбовидная (рис. 2.2).
Рис. 2.2. Примеры иерархических структур. а – древовидная (веерная); б – ромбовидная.
Ромбовидная структура ведет к двойной (иногда и более) подчиненности. Иерархия позволяет стратифицировать систему по уровням понимания. Каждый уровень представляет собой совокупность структурных отношений между элементами нижних уровней. Характерны следующие виды иерархии: временная, пространственная, функциональная, ситуационная и информационная. Временная иерархия. Признаком деления здесь является интервал времени от момента поступления информации о состоянии объекта управления до выдачи управляющего воздействия. Чем больше интервал, тем выше уровень (ранг) элемента. Управление может осуществляться в реальном времени, с интервалом сутки, декада, месяц, квартал и т. д. Причем управляющий интервал выбирается не произвольно, а исходя из критериев, определяющих устойчивость и эффективность функционирования всей системы. Пространственная иерархия. Признаком деления здесь является площадь, занимаемая объектом управления. Чем больше площадь объекта, тем выше его ранг. Данный признак — субъективный, так как не всегда площадь, занимаемая объектом, соответствует его значимости, и его можно использовать в случае аналогичности параметров элементов одного уровня. Функциональная иерархия. В основе лежит функциональная зависимость (подчиненность) элементов системы. Такое разделение также является субъективным, так как в этом случае трудно выделить границы между элементами системы. Ситуационная иерархия. Деление на уровни в данном случае производится в зависимости от эффекта, вызываемого той или иной ситуацией, например от ущерба, возникающего в результате аварии или выхода из строя оборудования. Информационная иерархия. В настоящее время этот вид иерархии является очень существенным в связи с возросшим значением информации для управления. В основе деления на уровни лежат оперативность и обновляемость информации. Именно через эти характеристики прослеживается иерархия информации по уровням управления предприятием.
Рассмотрим некоторые основные понятия автоматики, касающиеся принципиальных теоретических вопросов автоматического управления. К таким понятиям следует отнести: управляемый объект, управление, автоматическое управляющее устройство, автоматическую систему, воздействие, сигнал, обратную связь и др. Эти понятия являются общими для автоматического управления в самых различных областях науки и техники независимо от конкретных особенностей, принципа действия и практического назначения той или иной автоматической системы. Управление – целенаправленное вмешательство в процесс в системе. Цель системы - получение желаемого выходного воздействия или достижения желаемого состояния системы. Регулирование – разновидность управления, целью которого является поддержание постоянной или изменение по заданному закону некоторой величины, характеризующей процесс. Объект, в котором протекает управляемый процесс, называется управляемым объектом или объектом управления. Система управления (СУ) – совокупность управляющего устройства (УУ) и объекта управления (ОУ).
Рис. 3.1. Функциональная схема системы управления. Состояние объекта определяется рядом величин, характеризующих как воздействие на объект внешней среды и управляющих устройств, так и протекание процессов внутри самого объекта.
Рис. 3.2. Функциональная схема воздействий на объект управления. f = f (f1, f2, … fk) - неконтролируемые возмущения; g = g (g1, g2, … gr) – контролируемые возмущения; u = u (u1, u2, … us) – управляющие воздействия; x = x (x1, x2, … xn) – переменные состояния (фазовые координаты объекта); y = y (y1, y2, … ym) – выходные (наблюдаемые) переменные;
Контролируемые величины, характеризующие состояние объекта, по которым ведётся управление, называются управляемыми, или регулируемыми величинами. Величины, выражающие внешние влияния на объект называются воздействиями. Воздействия, вырабатываемые управляющим устройством или задаваемые человеком, называются управляющими воздействиями. Воздействия, не зависящие от системы управления, называются возмущениями. Возмущения можно разделить на два вида: а) нагрузка, б) помехи. В общем случае управляющие, возмущающие воздействия и состояния объекта – векторы. Если объект характеризуется одной управляющей и одной управляемой величиной, то векторы u и y имеют по одной координате, и объект называется простым или односвязным (одномерным). При наличии нескольких взаимосвязанных координат векторов u и y объект называется многосвязным (многомерным). Управление, осуществляемое без участия человека, называют автоматическим, а техническое устройство, выполняющее в этом случае функции управления,— автоматическим управляющим устройством или контроллером; объект управления и контроллер во взаимодействии друг с другом образуют систему автоматического управления. Системы автоматического управления – чисто машинные комплексы, построенные по законам автоматического регулирования и применяемые главным образом для управления технологическими и производственными процессами, описание которых может быть полностью формализовано. Система автоматического управления – совокупность управляемого объекта и управляющего устройства, взаимодействующих между собой в соответствии с законом (алгоритмом) управления.
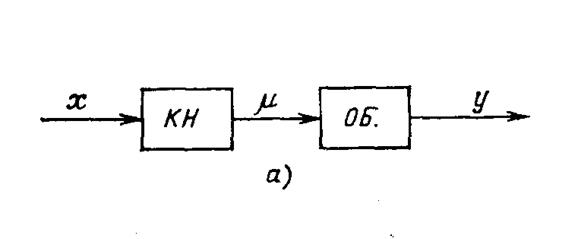
Простейшая функциональная структурная схема системы управления показана на рис .3.3 Здесь контроллер КН, получая информацию о цели управления в виде меняющегося во времени t сигнала задания x(t), формирует управляющее воздействие u(t) на объект ОБ таким образом, чтобы управляемая величина у(t) менялась в соответствии с изменением x(t), т. е. так, чтобы достигалась цель управления:
Рис.3.3. Функциональная схема системы автоматического управления.
Очевидно, что подобная система управления может реально функционировать только тогда, когда между изменением y(t) и вызвавшим его изменением \x(t) в объекте существует однозначное соответствие. Это соответствие отражается в математической модели объекта, которая предполагается заранее известной и может быть использована для определения алгоритма функционирования контроллера (алгоритма управления). Этот алгоритм определяет, как следует изменять управляющее воздействие u(t) в зависимости от изменения x(t) для того, чтобы была достигнута цель управления. Информацию о математической модели объекта, используемую для проектирования алгоритма функционирования контроллера, называют априорной (начальной) информацией об объекте управления. Практически рассмотренная структура системы управления может функционировать только при выполнении следующих довольно жестких условий: на объект управления не действуют никакие возмущения; математическая модель объекта известна для любого момента времени с достаточно высокой точностью; требуемый алгоритм управления может быть реализован в контроллере с достаточно высокой точностью. Нарушение хотя бы одного из этих условий приведет к появлению неконтролируемого самопроизвольного отклонения управляемой величины от желаемого значения, причем с течением времени это отклонение может стать сколь угодно большим. В этом случае в структуру системы управления приходится вводить добавочный канал, по которому контроллер получает информацию о действительном значении управляемой величины в каждый момент времени; это позволяет контроллеру при появлении отклонения от желаемого значения (независимо от того, какой причиной оно вызвано) осуществить добавочное изменение управляющего воздействия на объект так, чтобы это отклонение было ликвидировано.
Рис. 3.4. Функциональная схема замкнутой системы автоматического управления.
Соответствующая информационная структурная схема системы приведена на рис.3.4; канал, по которому информацию с выхода системы об изменении управляемой величины подается на вход контроллера, называют каналом обратной связи, или просто обратной связью. На этой схеме, помимо управляющего воздействия на объект ц (t), показаны также возмущающие воздействия X (t), число которых может быть неопределенно большим; среди них могут быть и недоступные для контроля. В процессе работы контроллер получает текущую информацию о цели управления, а также информацию о текущем состоянии объекта и среды его функционирования и в соответствии с этой информацией (которая называется рабочей) формирует управляющие воздействия на объект так, чтобы была достигнута цель управления. В системе с обратной связью (рис. 3.4 ) имеется замкнутый конту р циркуляции сигналов; поэтому такие системы получили также название замкнутых систем управления. Соответственно систему управления без обратной связи (рис.3.3) называют разомкнутой. На практике, особенно при управлении технологическими (и в том числе теплоэнергетическими) процессами, сформулированные выше условия применимости разомкнутых систем управления почти никогда не выполняются, так что реальные системы управления обычно имеют в своей структуре замкнутые контуры.
В зависимости от характера изменения сигнала задания (задающего воздействия) системы управления принято разделять на три вида: 1. Стабилизации, если задающее воздействие не меняется во времени. 2. Программного управления, если задающее воздействие является заранее известной (детерминированной) функцией времени. 3. Зависимого управления, или следящей, если задающее воздействие является неопределенной в будущем функцией времени, т. е. такой функцией, характер изменения которой в будущем нельзя прогнозировать или в лучшем случае можно прогнозировать лишь с определенной степенью вероятности.
Управление называется н епрерывным, если осуществляемое контроллером изменение управляющего воздействия происходит в непрерывной зависимости от изменения задающего воздействия и управляемой величины (а возможно, и от производных и интегралов от этих изменений). В случае дискретного управления управляющее воздействие принимает лишь какое-нибудь одно из нескольких возможных значений (в пределе — только из двух возможных значений) либо формируется в дискретные моменты времени. Дискретное управление, в частности, применяется тогда, когда алгоритм управления имеет характер логических условий; в этом случае его называют логическим. Логическое управление чаще всего применяется в пусковых режимах объекта, когда необходимо в определенной последовательности вводить в действие отдельные двигатели, механизмы и т. п. Обычно на практике при управлении сложными технологическим объектами непрерывное и дискретное управления применяются совместно. Так, управление температурой пара, вырабатываемого энергоблоком, производится непрерывно изменением положения клапана подачи воды на впрыск; однако при сильных изменениях нагрузки может понадобиться, кроме того, и переключение в схеме питательных магистралей и т. п.
На практике задача управления, как правило, расчленяется на несколько взаимосвязанных, но в то же время относительно самостоятельных задач, что приводит и к расчленению системы управления на более мелкие соподчиненные подсистемы. Подобное скоординированное между собой расчленение задач и систем управления получило название декомпозиции задач и систем управления. Как правило, из общей задачи управления выделяется задача устранения (или, по крайней мере, сведения к допустимому минимуму) вредного влияния на достижение цели управления действующих на объект неконтролируемых возмущений, а также неконтролируемых погрешностей в задании модели объекта, т. е. задача, которая в структуре замкнутой системы управления (рис. 1.1, б) решается на основе рабочей информации, получаемой контроллером по каналу обратной связи. Эта относительно самостоятельная часть задачи управления получила название задачи регулирования объекта, а часть системы управления, выполняющая эту задачу, — подсистемы регулирования. В результате подобной декомпозиции задачи управления контроллер расчленяется на два соподчиненных блока: 1) регулирующий, осуществляющий функции регулирования; этот блок обычно называется автоматическим регулятором, или просто регулятором; 2) к омандный, вырабатывающий командное воздействие на регулятор таким образом, чтобы была достигнута цель управления.
Рис. 3.5. Функциональная схема системы автоматического управления.
Структура системы управления в этом случае приобретает указанный на рис. 1.2 вид. Командное воздействие и (t), вырабатываемое командным блоком КБ, подается на вход подсистемы регулирования (на схеме она очерчена штриховой линией), где на основании выявленного отклонения управляемой величины от командного воздействия ер (t) = и (t) — у (t) регулятор Р формирует управляющее воздействие \i (t). Выявление отклонения ер (t) происходит в сумматоре, обозначенном на схеме кружком; знак, с которым берется каждое слагаемое, указан у концов соответствующих стрелок, входящих в сумматор. Смысл подобного, опосредствованного через подсистему регулирования, управления состоит в том, что отклонения управляемой величины от ее заданного значения, вызванные возмущениями и другими неучтенными факторами, достаточно эффективно устраняются регулятором, так что такую систему управления можно рассматривать как систему управления объектом без возмущений (см. рис. 1.1, а), функции которого теперь выполняет подсистема регулирования в целом. Рассмотренную систему управления (рис. 1.2) можно считать двухуровневой: первый (нижний) уровень образует подсистема регулирования, второй — система управления со структурой, показанной на рис. 1.1, а, в которой в качестве контроллера КН выступает КБ, а в качестве объекта ОБ — подсистема регулирования. Такого рода двухуровневые (а в общем случае и многоуровневые) структуры систем управления, в которых верхний уровень выполняет командные функции по отношению к нижестоящему уровню, получили название иерархических структур систем управления. Расчленение системы на соподчиненные уровни, на каждом из которых решается своя, относительно простая частная задача управления, позволяет сравнительно просто и эффективно решать общую задачу управления.
Состояние объекта определяется рядом величин, характеризующих как воздействие на объект внешней среды и управляющих устройств, так и протекание процессов внутри самого объекта.
Рис. 3.2. Функциональная схема воздействий на объект управления. f = f (f1, f2, … fk) - неконтролируемые возмущения; g = g (g1, g2, … gr) – контролируемые возмущения; u = u (u1, u2, … us) – управляющие воздействия; x = x (x1, x2, … xn) – переменные состояния (фазовые координаты объекта); y = y (y1, y2, … ym) – выходные (наблюдаемые) переменные;
Контролируемые величины, характеризующие состояние объекта, по которым ведётся управление, называются управляемыми, или регулируемыми величинами. Величины, выражающие внешние влияния на объект называются воздействиями. Воздействия, вырабатываемые управляющим устройством или задаваемые человеком, называются управляющими воздействиями. Воздействия, не зависящие от системы управления, называются возмущениями. Возмущения можно разделить на два вида: а) нагрузка, б) помехи. В общем случае управляющие, возмущающие воздействия и состояния объекта – векторы. Если объект характеризуется одной управляющей и одной управляемой величиной, то векторы u и y имеют по одной координате, и объект называется простым или односвязным (одномерным). При наличии нескольких взаимосвязанных координат векторов u и y объект называется многосвязным (многомерным).
Управление, осуществляемое без участия человека, называют автоматическим, а техническое устройство, выполняющее в этом случае функции управления,— автоматическим управляющим устройством или контроллером; объект управления и контроллер во взаимодействии друг с другом образуют систему автоматического управления. Системы автоматического управления – чисто машинные комплексы, построенные по законам автоматического регулирования и применяемые главным образом для управления технологическими и производственными процессами, описание которых может быть полностью формализовано. Система автоматического управления – совокупность управляемого объекта и управляющего устройства, взаимодействующих между собой в соответствии с законом (алгоритмом) управления.
Функциональная схема САР. Простейшая функциональная структурная схема системы управления показана на рис .3.3 Здесь контроллер КН, получая информацию о цели управления в виде меняющегося во времени t сигнала задания x(t), формирует управляющее воздействие u(t) на объект ОБ таким образом, чтобы управляемая величина у(t) менялась в соответствии с изменением x(t), т. е. так, чтобы достигалась цель управления:
Рис.3.3. Функциональная схема системы автоматического управления.
Очевидно, что подобная система управления может реально функционировать только тогда, когда между изменением y(t) и вызвавшим его изменением \x(t) в объекте существует однозначное соответствие. Это соответствие отражается в математической модели объекта, которая предполагается заранее известной и может быть использована для определения алгоритма функционирования контроллера (алгоритма управления). Этот алгоритм определяет, как следует изменять управляющее воздействие u(t) в зависимости от изменения x(t) для того, чтобы была достигнута цель управления. Информацию о математической модели объекта, используемую для проектирования алгоритма функционирования контроллера, называют априорной (начальной) информацией об объекте управления. Практически рассмотренная структура системы управления может функционировать только при выполнении следующих довольно жестких условий: на объект управления не действуют никакие возмущения; математическая модель объекта известна для любого момента времени с достаточно высокой точностью; требуемый алгоритм управления может быть реализован в контроллере с достаточно высокой точностью. Нарушение хотя бы одного из этих условий приведет к появлению неконтролируемого самопроизвольного отклонения управляемой величины от желаемого значения, причем с течением времени это отклонение может стать сколь угодно большим. В этом случае в структуру системы управления приходится вводить добавочный канал, по которому контроллер получает информацию о действительном значении управляемой величины в каждый момент времени; это позволяет контроллеру при появлении отклонения от желаемого значения (независимо от того, какой причиной оно вызвано) осуществить добавочное изменение управляющего воздействия на объект так, чтобы это отклонение было ликвидировано.
Рис. 3.4. Функциональная схема замкнутой системы автоматического управления.
Соответствующая информационная структурная схема системы приведена на рис.3.4; канал, по которому информацию с выхода системы об изменении управляемой величины подается на вход контроллера, называют каналом обратной связи, или просто обратной связью. На этой схеме, помимо управляющего воздействия на объект ц (t), показаны также возмущающие воздействия X (t), число которых может быть неопределенно большим; среди них могут быть и недоступные для контроля. В процессе работы контроллер получает текущую информацию о цели управления, а также информацию о текущем состоянии объекта и среды его функционирования и в соответствии с этой информацией (которая называется рабочей) формирует управляющие воздействия на объект так, чтобы была достигнута цель управления. В системе с обратной связью (рис. 3.4 ) имеется замкнутый контур циркуляции сигналов; поэтому такие системы получили также название замкнутых систем управления. Соответственно систему управления без обратной связи (рис.3.3) называют разомкнутой. На практике, особенно при управлении технологическими (и в том числе теплоэнергетическими) процессами, сформулированные выше условия применимости разомкнутых систем управления почти никогда не выполняются, так что реальные системы управления обычно имеют в своей структуре замкнутые контуры.
В зависимости от характера изменения сигнала задания (задающего воздействия) системы управления принято разделять на три вида: 1. Стабилизации, если задающее воздействие не меняется во времени. 2. Программного управления, если задающее воздействие является заранее известной (детерминированной) функцией времени. 3. Зависимого управления, или следящей, если задающее воздействие является неопределенной в будущем функцией времени, т. е. такой функцией, характер изменения которой в будущем нельзя прогнозировать или в лучшем случае можно прогнозировать лишь с определенной степенью вероятности.
1 Аккумулирующая способность (ёмкость) – способность объекта накапливать рабочую среду или энергию (ёмкость резервуара, момент инерции вращающихся частей турбогенератора, теплоёмкость объёма жидкости.) 2 Самовыравнивание – способность объекта самостоятельно, без участия регулятора приводить возникающее несоответствие между притоком и расходом рабочей среды к нулю, а регулируемую величину к новому установившемуся значению. Иногда под самовыравниванием понимают устойчивость - способность объекта после кратковременного внешнего воздействия с течением времени возвращаться к исходному состоянию или близкому к нему. 3 Время разгона объекта - принято называть полным временем разгона объекта продолжительность процесса самовыравнивания при начальном возмущающем воздействии, равном единице, в течение которого, начиная от нуля, регулируемая величина достигает (1 — 1/n)—части своего номинального значения. Обычно принимают n = 100. 4 Постоянная времени объекта - время разгона объекта при отсутствии самовыравнивания. Для определения этого времени Та следует провести касательную к кривой разгона r (t) в начальной точке и определить точку пересечения этой касательной с прямой номинального значения регулируемой величины. Для объектов, не имеющих самовыравнивания, значения времени разгона Т и постоянной времени Та совпадают.
Регулятор (АУУ – автоматическое управляющее устройство) – устройство, осуществляющее воздействие на управляемый объект в соответствии с заложенным в нём законом управления.
В состав регулятора входят следующие элементы:
- преобразовательные - измерительные Измеряют параметр или сигнал рассогласования - усилительные усилители - исполнительные перемещают регулирующие органы (электродвигатели, гидро- и сервоприводы.). Исполнительный элемент – последнее звено регулятора. - элементы корректирующих цепей. (обратная связь)
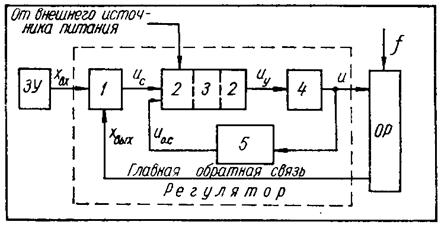
Рассмотрим функциональную схему системы автоматического регулирования (рис. 11), которая состоит из объекта регулирования ОР и регулятора (автоматического управляющего устройства). В этой системе функционально необходимыми элементами, т. е. такими элементами, при помощи которых реализуется принцип управления по отклонению, являются объект регулирования ОР и измерительное 1, усилительное 2 и исполнительное 4 устройства. В общем случае автоматический регулятор может рассматриваться состоящим из группы элементов, каждый из которых имеет свое определенное назначение. В отдельных случаях некоторые из этих элементов не входят в состав регулятора или входят в объединенном виде с другими. Ниже приводятся краткие сведения об этих элементах. а) Измерительные (чувствительные) элементы и датчики Назначение измерительных элементов измерять в процессе регулирования действительное значение регулируемой величины или основного возмущающего воздействия в зависимости от избранного принципа регулирования. В связи с этим выходная мощность элемента весьма невелика и обычно недостаточна для непосредственного приведения в движение регулирующего органа. По этой причине измерительные элементы регулируемых величин в системах регулирования часто называют чувствительными элементами. К измерительному элементу часто присоединяют преобразовательный элемент. Последний преобразовывает измеряемую неэлектрическую величину в электрическую или в другую, необходимую по условиям работы системы. Измерительные элементы систем регулирования, соединенные с такими преобразователями, часто называют датчиками.
Требуемое значение регулируемой величины вырабатывается в задающем устройстве ЗУ. ЗУ может входить в состав регулятора и являться тогда частью измерительного устройства. Оно может также находиться на значительном расстоянии от автоматической системы и быть связанным с ней дистанционно (по проводам или по радио). в) Элементы сравнения (датчики рассогласования) Назначение элемента сравнения состоит в определении рассогласования между действительным и предписанным значениями, регулируемой величины и выдачи управляющего сигнала регулятору. Элемент сравнения часто совмещается с задатчиком и измерительным элементом. Измерительное устройство вырабатывает сигнал ис, называемый иногда сигналом ошибки, который пропорционален отклонению Ах регулируемой величины хВь .х от требуемого значения хвх:
где kc^- коэффициент передачи измерительного устройства.
Усилительное устройство * усиливает сигнал ошибки до величины иу, достаточной для управления исполнительным устройством. Усиление сигнала ошибки происходит за счет энергии внешнего источника. В простейших системах, где сигнал ошибки имеет достаточную мощность, усилительное устройство может отсутствовать. Однако такие системы, которые назыв
|
||||
|
|
Последнее изменение этой страницы: 2016-07-14; просмотров: 371; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.195.30 (0.012 с.) |














 - чувствительные датчики
- чувствительные датчики