Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кафедра будівельних, дорожніх, меліоративних, сільськогосподарських машин і обладнанняСодержание книги
Поиск на нашем сайте
02-01-337
МЕТОДИЧНІ ВКАЗІВКИ
до виконання лабораторних робіт з навчальної дисципліни «Випробування і експериментальні дослідження машин та обладнання» для студентів напрямку 6.050503 «Машинобудування» денної та заочної форм навчання
Рекомендовано до друку методичною комісією за напрямом підготовки 6.050503 «Машинобудування» протокол №10 від 27 лютого 2014 р.
Рівне 2015 Методичні вказівки до виконання лабораторних робіт з навчальної дисципліни «Випробування і експериментальні дослідження машин та обладнання» для студентів напрямку 6.050503 «Машинобудування» денної та заочної форм навчання / Л.В. Мобіло, – Рівне: НУВГП, 2015.-51 с.
Упорядник: Л.В. Мобіло, к.т.н., доцент
Відповідальний за випуск – С.В. Кравець, д.т.н., професор, завідувач кафедри будівельних, дорожніх, меліоративних, сільськогосподарських машин і обладнання.
ЗМІСТ
© Л.В. Мобіло, 2015 © НУВГП, 2015 Лабораторна робота №1
Тема: Будова і робота ґрунтового каналу Мета: вивчити призначення, будову, роботу і технічні дані ґрунтового каналу НУВГП Завдання: 1) ознайомитись з будовою ґрунтового каналу і його складових: тензометричного візка, моделями робочих органів, приводом візка, вимірювальною апаратурою; 2) вивчити динамометричний і тензометричний методи дослідження взаємодії робочих органів із середовищем.
Будова ґрунтового каналу Ґрунтовий канал призначається для експериментального дослідження робочих органів машин і обладнання, в першу чергу, для визначення зусиль, що діють на окремі вузли і деталі машини, тягового опору, що виникає при пересуванні робочих органів машин і дослідження взаємодії моделей робочих органів з ґрунтом. Ґрунтовий канал НУВГП використовується як для навчальних цілей, так і для науково експериментальних досліджень викладачами і аспірантами в дисертаційних роботах. Ґрунтовий канал являє собою бетонний лоток з розмірами 10х1,8х1,5 м. заповнений піщано-глинистою сумішшю, склад якої можна періодично змінювати. Над каналом по рейках пересувається тензометричний візок, який являє собою зварну конструкцію, що спирається на чотири колеса з ребордами. Для пересування тензометричного візка спроектований привід. До привода ставляться такі вимоги: забезпечення необхідного тягового зусилля, широкого діапазону швидкостей пересування візка, плавність його ходу. В якості силового обладнання прийнято електродвигун трьохфазового струму, трансмісія трактора ДТ-75Б і барабан будівельної лебідки. Принципова схема і загальний вигляд привода тензометричного візка дано на рис. 1.1. Обертовий момент двигуна 3 через ланцюгову передачу 5 передається на вхідний вал ходозменшувача 4 і далі на коробку зміни швидкостей 2. Для збільшення передаточного числа і полегшення керування пересуванням візка використовується задній міст трактора ДТ-75Б, який складається із головної передачі, бортового фрикціону і бортового редуктора. Обертовий момент двигуна 3 за допомогою ланцюгової передачі 5 передається на вхідний вал ходозменшувача 4 і далі на коробку зміни передач 2.
Схема вимірювання сил різання дана на рис. 1.2. При визначенні сил різання можливі два методи виміру: динамометричний і тензометричний.
При включенні у вимірювальну схему датчики з’єднують за допомогою одинарного моста Уітстона. основна задача якого полягає в тому, щоб перетворити зміни електричного опору датчика в електричний струм або напругу. У залежності від прийнятої схеми з’єднання датчика в плечах моста можна вимірювати деформації розтягання, стиску, згину, кручення. Головною перевагою тензометричного способу з використанням тензодатчиків опорів при дослідженні землерийних робочих органів є його універсальність, висока точність виміру (помилка не перевищує 10...12 %), а також можливість синхронно вести запис безлічі досліджуваних і взаємозалежних параметрів на одній стрічці у виді окремих ліній. Тому для виміру сил і моментів використовуємо метод тензометрування. Динамометричний метод у лабораторних умовах можна використовувати як перевірочний.
Рис. 1.1. Схема приводу танзометричного візка: 1 – задній міст; 2 – КПП; 3 – електродвигун; 4 – ходозменшувач; 5, 19 – ланцюгова передача; 6, 13 – опора; 7 – рамки; 8 – лоток; 9, 12, 14, 15, 16 – направляючі; 10 – ходові котки; 11 – візок; 17 – трос; 18 – барабан
Лабораторна робота №2 Тема: Будова і робота вимірювально - реєструючої апаратури Мета: Вивчити призначення, будову, роботу, технічні дані вимірювально-реєструючої апаратури для тензометрування Завдання: 1) Ознайомитись із будовою і роботою тензорезисторів і тензоланок; 2) Вивчити методи вимірювань напружень згину, зсуву, кручення та апаратуру для їх визначення; 3) Провести наклеювання тензорезисторів на тензобалку.
2.1. Будова тензоопорів (тензодатчиків) Вимірювання механічних напружені тензоопорами основані на зміні електричного опору провідника струму при його деформації. Тензоопори бувають дротяні і фолієві. Дротяні тензоопори (датчики) (рис. 2.1) являють собою зигзагоподібний константановий дріт діаметром 0,02-0,05 мм, який розташований між двома тонкими смужками паперу або плівки і приклеєний до них. Для зручності електричного монтажу до кінців дротів припаюють мідні струмовивідні дроти діаметром 0,1-0,2 мм і довжиною 20-30 мм. Недоліком дротяних тензоопорів є кінці ділянок, що складають петлі, мають поперечну чутливість. Це знижує чутливість датчика в порівнянні з чутливістю матеріалу дроту на 20-30 %, викликає зміну опору R від поперечних деформацій, що спотворює покази датчика. Разом з тим, дротяні датчики є самими поширеними дякуючи простоті
Недолік – дуже тонка стрічка, яка може ламатися, що знижує надійність.
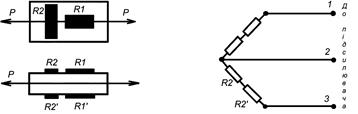
Рис. 2.3. Схема включення датчиків для реєстрації деформацій розтягу-стиску з виключенням згину
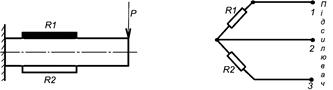
Вимірювання напружень згину Монтажна і вимірювальна схеми датчиків для вимірювання деформацій від згину деталі в досліджуваному перерізі приведена на рис. 2.4.
Рис. 2.4. Схема включення датчиків для реєстрації деформації Датчики R1 і R2, що включені в сусідні плечі вимірювального містка, накладають на деталь, навантажену згинаючим моментом. Один із датчиків R1, наклеюють на поверхню деталі, на які діють напруження розтягу, а другий датчик R1 – на поверхню, на яку діє таке ж по величині напруження стиску, тобто датчики R1 і R2 підлягають деформаціям, однаковим по величині, але протилежним за знаком. При цьому виключається вплив температури на показ датчиків, так як при зміні температури обидва датчики деформуються на однакову по величині і знаку величину. Оскільки вони включені в сусідні плечі моста, струм у вимірювальній діагоналі моста не змінюється. Таким чином, тут забезпечується так звана схемна термокомпенсація. Другою перевагою такої схеми – чутливість датчиків в два рази більша, як при одному активному датчику.
|
||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-06-29; просмотров: 78; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.147.78.249 (0.007 с.) |

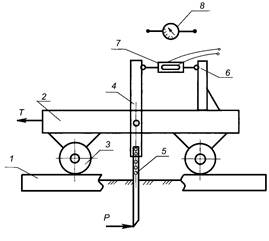 Для збільшення передаточного числа і полегшення керування переміщенням візка використаний задній міст трактора ДТ-75Б, що складає з головної передачі, бортового фрикціону і бортьового редуктора. На вихідному валові правого бортового редуктора встановлена зірочка ланцюгової передачі 19, що служить для передачі обертового моменту на вал барабана 18. Відома зірочка цієї передачі виконана змінною. Набір зірочок разом з ходозменшувачем і коробкою зміни передач дозволяє змінити швидкість пересування візка в широких межах від 0,01 м/хв. до 3 м/хв. із великим числом проміжних величин. Механізм пересування візка трособлочний. Трос закріплюється на опорі 6, проходить через направляючі блоки 9 і 16, виходить на барабан 13. З барабана трос іде на проміжний блок 14 і далі, знову на направляючі блоки 12 і 15, минаючи які закріплюється на опорі 13. Така конструкція дозволяє уникнути перекосу візка при русі уздовж каналу.
Для збільшення передаточного числа і полегшення керування переміщенням візка використаний задній міст трактора ДТ-75Б, що складає з головної передачі, бортового фрикціону і бортьового редуктора. На вихідному валові правого бортового редуктора встановлена зірочка ланцюгової передачі 19, що служить для передачі обертового моменту на вал барабана 18. Відома зірочка цієї передачі виконана змінною. Набір зірочок разом з ходозменшувачем і коробкою зміни передач дозволяє змінити швидкість пересування візка в широких межах від 0,01 м/хв. до 3 м/хв. із великим числом проміжних величин. Механізм пересування візка трособлочний. Трос закріплюється на опорі 6, проходить через направляючі блоки 9 і 16, виходить на барабан 13. З барабана трос іде на проміжний блок 14 і далі, знову на направляючі блоки 12 і 15, минаючи які закріплюється на опорі 13. Така конструкція дозволяє уникнути перекосу візка при русі уздовж каналу. Основним методом досліджень робочих органів землерийних машин у даний час є тензометричний метод, заснований на вимірі ефектричного опору тензодатчика, міцно з’єднаного з досліджуваною деталлю, при його деформації разом з останньою.
Основним методом досліджень робочих органів землерийних машин у даний час є тензометричний метод, заснований на вимірі ефектричного опору тензодатчика, міцно з’єднаного з досліджуваною деталлю, при його деформації разом з останньою.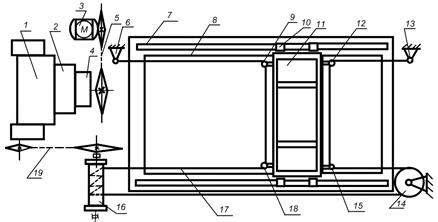
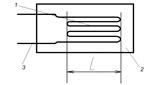 виготовлення.
виготовлення. Фолієві тензоопори (датчики) (рис. 2.2) складаються із стрічки товщиною 4-12 мікрон, частина металу якої вибрана травленням, а та що залишилася є самим датчиком. Частини, що сприймають поперечні деформації, мають більший переріз і, відповідно, менший опір, тому реакція датчика на поперечні деформації незначна. Кінці товсті, тому легко здійснюються виводи. Розташування сітки може бути будь-яким, зокрема, радіальним.
Фолієві тензоопори (датчики) (рис. 2.2) складаються із стрічки товщиною 4-12 мікрон, частина металу якої вибрана травленням, а та що залишилася є самим датчиком. Частини, що сприймають поперечні деформації, мають більший переріз і, відповідно, менший опір, тому реакція датчика на поперечні деформації незначна. Кінці товсті, тому легко здійснюються виводи. Розташування сітки може бути будь-яким, зокрема, радіальним.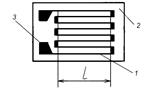 2.2. Вимірювання напружень розтягу і стиску
2.2. Вимірювання напружень розтягу і стиску При вимірюванні деформацій від розтягуючого або стискуючого навантаження на деталі, які мають симетричний відносно нейтральної осі розріз, монтажна і вимірювальна схема датчиків будуть мати два робочих і два компенсаційних датчики в кожному плечі (рис. 2.3). Датчики R1 і R1 наклеюють на деталі на діаметрально протилежних відносно нейтральної осі волокнах. На цю ж поверхню в перпендикулярному напрямку наклеюють компенсаційні датчики R2 і R2’. Така схема не чутлива до деформацій від згинаючого навантаження і від зміни температури.
При вимірюванні деформацій від розтягуючого або стискуючого навантаження на деталі, які мають симетричний відносно нейтральної осі розріз, монтажна і вимірювальна схема датчиків будуть мати два робочих і два компенсаційних датчики в кожному плечі (рис. 2.3). Датчики R1 і R1 наклеюють на деталі на діаметрально протилежних відносно нейтральної осі волокнах. На цю ж поверхню в перпендикулярному напрямку наклеюють компенсаційні датчики R2 і R2’. Така схема не чутлива до деформацій від згинаючого навантаження і від зміни температури.