
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исследование свойств типовых линейных звеньевСодержание книги Поиск на нашем сайте
Введение
Исследование свойств элементов автоматизированного электропривода с помощью методов цифрового моделирования является совершенно необходимым этапом при разработке и проектировании. В данных методических указаниях даётся программа проведения, цели и задачи исследований на цифровой модели для каждого рассматриваемого элемента электропривода. Для каждого исследуемого объекта предусмотрены до 12 вариантов параметров. Целью проведения данных лабораторных занятий является обучение будущих специалистов знаниям существующих методов аналогового и цифрового моделирования современного электропривода, отработка навыков применения существующих программ моделирования работы электроприводов, приобретение практического опыта анализа работы современных электроприводов. В результате изучения дисциплины студенты должны уметь применять специальные программные средства для решения на ЭВМ и АВМ задач проектирования систем управления современными электроприводами. Студенты должны так же получить представление о перспективах развития аппаратных и программных специальных средств ЭВМ в решении вопросов САПР, при проектировании систем управления современным электроприводом и анализе режимов работы современных электроприводов. Лабораторная работа № 1 Исследование свойств типовых линейных звеньев Систем автоматического регулирования
В данной работе должны быть получены кривые переходных процессов на выходах UВЫХ(t) следующих звеньев: а) интегрирующего с передаточной функцией W1(p) = б) инерционного или апериодического с передаточной функцией W2(p) = в) пропорционально-интегрирующего с передаточной функцией W3(p) = г) реально дифференцирующего с передаточной функцией W4(p) = Параметры звеньев приведены в табл. 1.1.
Таблица 1.1
Напряжения на выходах исследуемых звеньев должны быть получены для двух основных режимов входных воздействий (рисунок):
- скачкообразное изменение (рис. 1.1, а); - линейный закон изменения (рис. 1.1, б).
а б
Рис. 1.1. Скачкообразный (а) и линейный (б) закон изменения входного воздействия
Параметры входных сигналов по вариантам представлены в таблице 1.2.
Таблица 1.2
Данные зависимости моделируются в среде визуального программирования MatLab Simulink с помощью блоков: а) б лока построения сигналов Signal Builder; б) блока Transfer Fcn; в) блока Mux; г) осциллографа Scope. Для каждого исследуемого звена необходимо получить зависимости UВХ(t) и UВЫХ(t) для двух видов входных воздействий, как на экране дисплея, так и на бумаге с помощью принтера. При необходимости регистрации на одном графике, как UВХ(t), так и UВЫХ(t) возможно введение масштабов с использованием пропорционального звена. Также необходимо получить и распечатать частотные характеристики (ЛАЧХ и ЛФЧХ) каждого звена, отметить на них частоты среза и сопряжения, если таковые имеются. В отчёте по лабораторной работе по результатам моделирования установить, как зависят величина и характер изменения UВЫХ(t) от: а) характера изменения входного сигнала UВХ(t) (величины скачка, установившегося значения, темпов нарастания, спадания); б) параметров исследуемого звена (Кi, Тi). Выборка и редактирование универсального Блока Transfer Fcn
Программа Simulink является приложением к пакету MATLAB. При моделировании с использованием Simulink реализуется принцип визуального программирования, в соответствии с которым, пользователь на экране из библиотеки стандартных блоков создает модель устройства и осуществляет расчеты. При этом, в отличие от классических способов моделирования, пользователю не нужно досконально изучать язык программирования и численные методы математики, а достаточно общих знаний требующихся при работе на компьютере и, естественно, знаний той предметной области в которой он работает.
Simulink является достаточно самостоятельным инструментом MATLAB и при работе с ним совсем не требуется знать сам MATLAB и остальные его приложения. С другой стороны доступ к функциям MATLAB и другим его инструментам остается открытым и их можно использовать в Simulink. Часть входящих в состав пакетов имеет инструменты, встраиваемые в Simulink (например, LTI-Viewer приложения Control System Toolbox – пакета для разработки систем управления). Имеются также дополнительные библиотеки блоков для разных областей применения (например, Power System Blockset – моделирование электротехнических устройств, Digital Signal Processing Blockset – набор блоков для разработки цифровых устройств и т.д). При работе с Simulink пользователь имеет возможность модернизировать библиотечные блоки, создавать свои собственные, а также составлять новые библиотеки блоков. При моделировании пользователь может выбирать метод решения дифференциальных уравнений, а также способ изменения модельного времени (с фиксированным или переменным шагом). В ходе моделирования имеется возможность следить за процессами, происходящими в системе. Для этого используются специальные устройства наблюдения, входящие в состав библиотеки Simulink. Результаты моделирования могут быть представлены в виде графиков или таблиц. Для запуска программы необходимо предварительно запустить пакет MATLAB. Основное окно пакета MATLAB показано на рис. 1.2. Там же показана подсказка появляющаяся в окне при наведении указателя мыши на ярлык Simulink в панели инструментов.
Рис. 1.2. Основное окно программы MATLAB
После открытия основного окна программы MATLAB нужно запустить программу Simulink. Это можно сделать одним из трех способов (рис. 1.3): · Нажать кнопку · В командной строке главного окна MATLAB напечатать Simulink и нажать клавишу Enter на клавиатуре. · В меню File открыть вкладку New - Model.
Рис. 1.3. Основное окно программы MATLAB
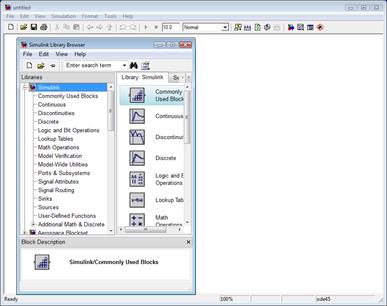
Рис. 1.4. Окно рабочей области Появившееся окно – окно рабочей области, в которой можно собирать структурные схемы динамических систем. Все динамические блоки находятся в библиотеке, которая открывается нажатием клавиши
Рис. 1.5. Библиотека MATLAB
Выбрать и расположить в окне необходимые для модели блоки можно указав курсором на требуемый блок в выбранном разделе (например Continuous – Transfer Fcn) и нажав на левую клавишу “мыши” - “перетащить” блок в созданное окно (рис. 1.6). Клавишу мыши нужно держать нажатой.
Выбранный блок является универсальным и в него можно записать передаточную функцию любого известного и ТАУ динамического звена, любого порядка.
Рис. 1.6. Выборка блоков библиотеки MATLAB
Например, необходимо реализовать апериодическое звено первого порядка с передаточной функцией
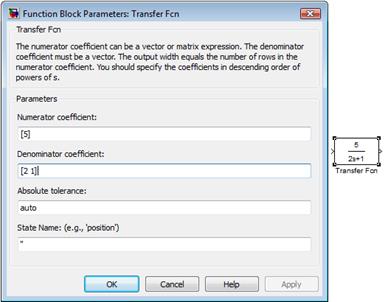
Для этого нужно дважды щелкнуть мышью блок Transfer Fcn в рабочем окне (рис. 1.7).
Рис. 1.7. Функциональное окно блока Transfer Fcn
В появившемся функциональном окне в строке Numerator coefficient в квадратных скобках через пробел указываются коэффициенты полинома числителя передаточной функции, а в строке Denominator coefficient коэффициенты полинома числителя. В данном случае для выбранного апериодического звена заполненный функциональный блок представлен на рис. 1.8.
Рис. 1.8. Функциональное окно блока Transfer Fcn
Для удаления блока необходимо выбрать блок (указать курсором на его изображение и нажать левую клавишу “мыши”), а затем нажать клавишу Delete на клавиатуре. Любая динамическая система предполагает исследования её с помощью управляющих и возмущающих воздействий. Изменяющийся во времени сигнал любой формы можно получить с помощью универсального блока построения сигналов Signal Builder, который находится в списке библиотеки Simulink – Sources. Для снятия переходных процессов в среде MatLab можно воспользоваться многофункциональным осциллографом (список Sinks - Scope). В осциллограф можно завести несколько сигналов с помощью блока Mux в спискеCommonly Used Blocks (рис. 1.9). Соединение двух блоков (вход - выход) осуществляется удерживанием и соединением входа с выходом левой кнопкой мыши. При подведении мыши ко входу курсор меняет форму на крест.
Рис. 1.9. Выборка блока Mux Рис.1.10. Окно построения сигнала Signal Builder
Рис.1.11. Окно построения сигнала Для того, чтобы открыть окно просмотра сигналов необходимо выполнить двойной щелчок левой клавишей “мыши” на изображении блока Scope, появится окно осциллографа (рис. 1.12). Это можно сделать на любом этапе расчета (как до начала расчета, так и после него, а также во время расчета). В том случае, если на вход блока поступает векторный сигнал, то кривая для каждого элемента вектора строится отдельным цветом.
Рис. 1.12. Окно осциллографа
Настройка окна осциллографа выполняется с помощью панелей инструментов (рис. 1.13).
Рис. 1.13. Панель инструментов блока Scope Панель инструментов содержит 11 кнопок: 1. Print – печать содержимого окна осциллографа. 2. Parameters – доступ к окну настройки параметров. 3. Zoom – увеличение масштаба по обеим осям. 4. Zoom X-axis – увеличение масштаба по горизонтальной оси. 5. Zoom Y-axis – увеличение масштаба по вертикальной оси. 6. Autoscale – автоматическая установка масштабов по обеим осям. 7. Save current axes settings – сохранение текущих настроек окна. 8. Restore saved axes settings – установка ранее сохраненных настроек окна. 9. Floating scope – перевод осциллографа в “ свободный” режим. 10. Lock/Unlock axes selection – закрепить/разорвать связь между текущей координатной системой окна и отображаемым сигналом. Инструмент доступен, если включен режим Floating scope. 11. Signal selection – выбор сигналов для отображения. Инструмент доступен, если включен режим Floating scope.
Изменение масштабов отображаемых графиков можно выполнять несколькими способами:
1. Нажать соответствующую кнопку ( 2. Нажать соответствующую кнопку (
Рис. 1.14. Окно просмотра сигналов осциллографа
3. Щелкнуть правой клавишей “мыши” в окне графиков и, выбрать команду Axes properties… в контекстном меню. Откроется окно свойств графика, в котором с помощью параметров Y-min и Y-max можно указать предельные значения вертикальной оси. В этом же окне можно указать заголовок графика (Title), заменив выражение %<SignalLabel> в строке ввода. Окно свойств показано на рис. 1.15.
Рис. 1.15. Окно свойств графика Параметры: Параметры блока устанавливаются в окне ‘Scope’ parameters, которое открывается с помощью инструмента General – общие параметры. Data history – параметры сохранения сигналов в рабочей области MATLAB (рис. 1.16).
Рис. 1.16. Окно свойств осциллографа Во вкладке Limit data points to last можно указать нужное количество точек осциллографа. Если точек не будет хватать для построения всех переходных процессов, то графики будут «урезаны» во временном диапазоне. Выбор метода счета Рис. 1.17. Окно конфигурации
Рис. 1.18. Инерционное звено Сначала нужно установить точки входа (Input point) и выхода (Output point) для снятия частотной характеристики. Для этого необходимо щелкнуть правой кнопкой мыши на линию входа в блок и выбрать Linearization Points / Input Рoint, (рис. 1.19).
Рис. 1.19. Установка точки входа Затем необходимо установить точку выхода частотной характеристики, щелкнув правой кнопкой на соединительную линию выхода инерционного звена и выбрав Linearization Points / Output Point, (рис.1.20).
Рис. 1.20. Установка точки выхода На пиктограмме структурной схемы должны появиться стрелки точек входа и выхода (рис. 1.20). Далее в меню рабочего окна Tools нужно выбрать вкладку Control Design / Linear Analysis, рис. 1.21. В появившемся окне Сontrol and Estimation Tools Manager необходимо установить тип осциллографа Bode response plot. Данного типа осциллограф является логарифмическим и показывает амплитудную и фазовую характеристики, рис. 1.22.
Рис. 1.21. Открытие окна частотного анализа
Рис. 1.22. Окно свойств частотного анализа Далее в окне Сontrol and Estimation Tools Manager нужно нажать кнопку Linearize Model. Появится окно с ЛАЧХ и ЛФЧХ инерционного звена, (рис. 1.23).
Рис. 1.23. Окно просмотра частотных характеристик
Лабораторная работа № 2
Лабораторная работа № 3 Лабораторная работа № 4 Лабораторная работа № 5 Регулировании скорости
Структурная схема двигателя постоянного тока при постоянном потоке возбуждения наиболее часто представляется в виде, изображённом на рис. 5.1.
Рис. 5.1
Здесь RЭ, ТЭ - эквивалентное сопротивление и постоянная времени якорной цепи двигателя; КФН - коэффициент двигателя;
ТМ =
Исходные параметры по структурной схеме для каждого варианта приведены в табл. 5.1.
Таблица 5.1
Для всех вариантов ТЭ = 0.03 с. В отчёте по лабораторной работе на основе реализованной модели необходимо рассчитать и проанализировать переходные процессы UЯ(t), IЯ(t), w(t) в следующих режимах:
1) разгон и торможение двигателя на холостом ходу при изменении напряжения якоря в соответствии с рис. 5.2.; 2) для данной структурной схемы построить частотные характеристики (ЛАЧХ и ЛФЧХ) для трёх случаев: а) входной сигнал для частотной характеристики б) входной сигнал для частотной характеристики в) входной сигнал для частотной характеристики 3) разгон и торможение двигателя при приложении IС = IН: а) активного статического момента (тока) в интервале времени 0 ¸ t5; б) реактивного статического момента, появляющегося при w ¹ 0, (на модели реализуется с помощью релейного элемента РЭ с уровнем ограничения, равным IC = IН); в) статического момента, прикладываемого в период разгона двигателя (t = t1) и снимаемого в период торможения (t = t4); 4) приложения скачка напряжения якоря DUЯ = 0.1UЯН при UЯ0 = (0.5 ¸ 0.8)UЯН = const; 5) приложение IC = IЯН при UЯ0 = (0.5 ¸ 0.8)UЯН.
Внимание! В двух последних режимах для исключения переходных процессов, вызванных начальным изменением напряжения якоря при UЯ0, необходимо в звене, моделирующем электромеханическую инерцию двигателя, задать начальное значение скорости w0 =
Величины и характер изменения UЯ(t) и IС(t) для каждого варианта представлены на рис. 5.2 и в табл. 5.2.
Рис. 5.2
Таблица 5.2
В отчёте по лабораторной работе необходимо: 1) проанализировать переходные процессы для всех, указанных выше, режимов; 2) проанализировать полученные частотные характеристики для всех, указанных выше, режимов 3) установить влияние на характер переходных процессов и установившихся режимов: - изменения напряжения якоря; - характера статического момента; 4) сделать необходимые выводы по полученным результатам.
Лабораторная работа № 6 Регулировании скорости
Структурная схема двигателя постоянного тока при регулировании скорости в двух зонах может быть представлена в виде, изображённом на рис. 6.1. Все параметры исследуемого двигателя должны быть взяты из предыдущей лабораторной работы, а величина суммарного момента инерции рассчитывается из выражения JS = Для более полного использования двигателя по мощности и моменту, ослабление потока возбуждения двигателя осуществляется только после того, как будет достигнуто номинальное значение напряжения якоря.
Рис. 6.1
В отчёте по лабораторной работе на основе цифровой модели необходимо рассчитать и проанализировать переходные процессы UЯ(t), IЯ(t), w(t) в следующих режимах:
1) разгон двигателя на холостом ходу до максимальной скорости и торможение до нуля; 2) разгон до максимальной скорости и торможение, при приложении МC = КФН×IЯН при разгоне и снятии статического момента при торможении; 3) приложение скачка напряжения якоря UЯ при: а) КФ0 = КФН, UЯ0 = UЯН, б) КФ0 = g×КФН, UЯ = UЯН; 4) приложение скачком МС = МН при: а) КФ0 = КФН, UЯ0 = UЯН, б) КФ0 = g×КФН, UЯ = UЯН; 5) изменение скачком потока возбуждения двигателя DКФ0 = +0.1КФН при UЯ = UЯН, КФ0 = g×КФН. 6) Для структурной схемы (рис.) построить частотные характеристики (ЛАЧХ и ЛФЧХ) для двух случаев: а) входной сигнал для частотной характеристики б) входной сигнал для частотной характеристики Величина и характер изменения UЯ(t), КФ(t) и МС(t) для реализации режимов 1 и 2 приведены на рис. 6.2 и в таблице 6.1.
Рис. 6.2 Таблица 6.1
Внимание! Для исключения переходных процессов, вызванных начальным изменением напряжения якоря UЯ0, необходимо, как и в предыдущем случае, в звене, моделирующем электромеханическую инерцию двигателя, задать начальное значение скорости w0 =
В отчёте по лабораторной работе необходимо: 1) проанализировать переходные процессы для всех рассмотренных выше режимов; 2) установить влияние на характер переходных процессов и установившихся режимов: - изменения напряжения якоря; - ударного приложения статического момента; - изменения потока возбуждения двигателя; 3) провести сравнительный анализ переходных процессов в режимах 3, 4 при полном и ослабленном значениях потока возбуждения двигателя; 4) проанализировать частотные характеристики, снятые по возмущающему воздействию, при полном и ослабленном значениях потока возбуждения двигателя; 5) сделать выводы по полученным результатам.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Справочник по автоматизированному электроприводу / Под ред. В. А. Елисеева, А. В. Шинянского. - М.: Энергоатомиздат, 1983. - 615 с. 2. Чиликин М. Г., Ключев В. И., Сандлер А. С. Теория автоматизированного электропривода. - М.: Энергия, 1976. - 615 с. 3. Линьков С.А., Радионов А.А. Моделирование в электроприводе. Уч. пособие. - Магнитогорск, 2009. - 123 с. Введение
Исследование свойств элементов автоматизированного электропривода с помощью методов цифрового моделирования является совершенно необходимым этапом при разработке и проектировании. В данных методических указаниях даётся программа проведения, цели и задачи исследований на цифровой модели для каждого рассматриваемого элемента электропривода. Для каждого исследуемого объекта предусмотрены до 12 вариантов параметров. Целью проведения данных лабораторных занятий является обучение будущих специалистов знаниям существующих методов аналогового и цифрового моделирования современного электропривода, отработка навыков применения существующих программ моделирования работы электроприводов, приобретение практического опыта анализа работы современных электроприводов. В результате изучения дисциплины студенты должны уметь применять специальные программные средства для решения на ЭВМ и АВМ задач проектирования систем управления современными электроприводами. Студенты должны так же получить представление о перспективах развития аппаратных и программных специальных средств ЭВМ в решении вопросов САПР, при проектировании систем управления современным электроприводом и анализе режимов работы современных электроприводов. Лабораторная работа № 1 Исследование свойств типовых линейных звеньев
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-26; просмотров: 309; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.139.107.148 (0.015 с.) |

 .
. .
. .
. .
.

 (Simulink)на панели инструментов командного окна MATLAB.
(Simulink)на панели инструментов командного окна MATLAB.


 .
.




 ,
,  или
или  ) и щелкнуть один раз левой клавишей “мыши” в нужном месте графика. Произойдет 2,5 кратное увеличение масштаба.
) и щелкнуть один раз левой клавишей “мыши” в нужном месте графика. Произойдет 2,5 кратное увеличение масштаба.

 (Parameters) панели инструментов. Окно параметров имеет две вкладки:
(Parameters) панели инструментов. Окно параметров имеет две вкладки:






 - электромеханическая постоянная времени электропривода, а JS - суммарный момент инерции электропривода.
- электромеханическая постоянная времени электропривода, а JS - суммарный момент инерции электропривода. , выходной
, выходной  ;
; , выходной
, выходной  , выходной
, выходной  .
.
 .
.
 , выходной
, выходной  ;
; .
.
 .
.


