Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Найдём все необходимые данные для второй записи.Содержание книги
Поиск на нашем сайте
Зададим на карте (рис. 7.1) нашу исходную точку WP 1 (место первого наблюдения) и от нее с учетом скорости и времени построим маршрут движения (перый курс считаем равным 25°, второй курс равен 74°, третий курс равен 140°).
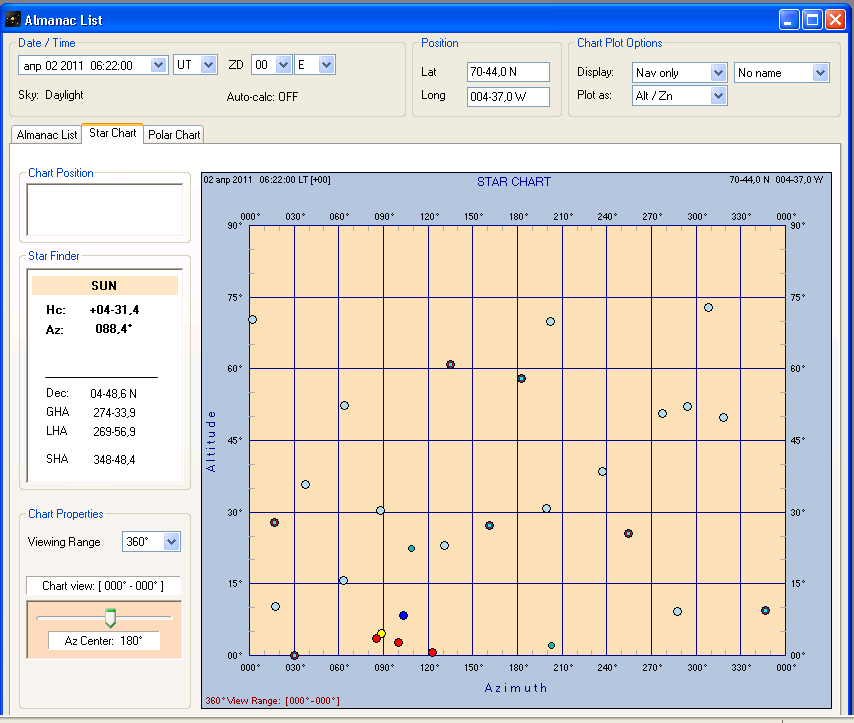
Рис. 7.1 – Построение маршрута перехода Снимем координаты второй путевой точки: φ = 70° 44.3' N λ = 004° 37.7' W Определим магнитное склонение в данной точке: d = 7° 37.3' W = 7.6° W Подберем светило для определения поправки гирокомпаса в точке WP 2. Наблюдения проходят в дневное время, а потому единственным видимым светилом является солнце (Рис. 7.2).
Рис. 7.2 – Подбор светила для определения поправки компаса в точке WP2 Наблюдаемый пеленг звезды составил 87.4° Найдем поправку ГК как разницу истинного азимута и взятого пеленга: ∆ГК = ∆ГК = 88.4° ˗ 87.4° = 1° Определим магнитный курс:
По значению МК определим из кривой девиации (рис. 6.3) примерное значение девиации: δ = ˗ 4° Определяем поправку магнитного компаса:
Рассчитаем курс по магнитному компасу: ar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>"> ar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>"> Определим курсовой угол светила:
Соответственно, используем репитер на правом крыле мостика. Найдём все необходимые данные для третей записи. Снимем координаты 3-й путевой точки: φ = 73° 27' N λ = 026° 47' E Определим магнитное склонение в этой точке: d = 13° 7.44' E = 13.1° E Подберем светило для определения поправки гирокомпаса в точке WP 2. Наблюдения проходят в дневное время, а потому единственным видимым светилом является солнце (Рис. 7.3).
Рис. 7.3. – Подбор светила для определения поправки компаса в точке WP3 Наблюдаемый пеленг солнца составил 180.9º. Найдем поправку ГК как разницу истинного азимута и взятого пеленга: ∆ГК = ∆ГК = 181.5° ˗ 180.9° = 0.6° Определим магнитный курс:
По значению МК определим из кривой девиации (рис.6.3) примерное значение девиации: δ = ˗ 3.9° Определяем поправку магнитного компаса:
Рассчитаем курс по магнитному компасу: ar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>"> ar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>"> Определим курсовой угол светила:
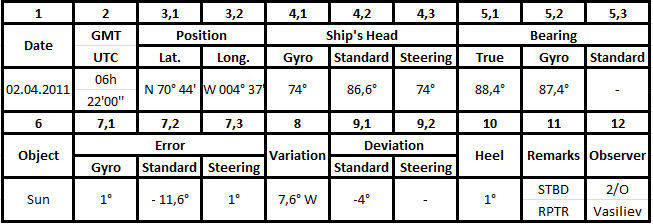
Соответственно, используем репитер на правом крыле мостика. Занесём все полученные данные в таблицу 7.1 Таблица 7.1 – Заполненный журнал поправок компаса
ВЫВОД В результате выполнения курсовой работы, была проанализирована точность бортовых приборов курсоуказания, определены их поправки и девиации основных видов, заполнен журнал поправок. По итогам выполненной работы можно сделать следующие выводы. 1. Максимально возможная скоростная девиация на широте плавания (φ=75°06’N) и при скорости V=26 узл. составляет ± 4.014°. Используемый на судне гирокомпас “Yokogawa CMZ-700” японского производителя Yokogawa Denshikiki Co Ltd. имеет вычислительное устройство (корректор), позволяющее автоматически корректировать данную ошибку по сигналам приемника ГНСС и/или лага. При условии автоматической коррекции сигнал курсоуказания на принимающие приборы поступает уже исправленный и не содержащий в себе скоростную девиацию. 2. Инерционная девиация вследствие резкого разворота на полной скорости и вызванного этим замедления судна на 30% составляет ˗ 3.17°, что соответствует требованиям ИМО. Этот вид девиации имеет место сразу после маневра и исчезает примерно через четверть периода затухающих колебаний (в рассмотренном случае 32 минуты). В течение этого времени не рекомендуется использовать ГК для решения важных навигационных задач. 3. Оценка времени прихода в меридиан составила 5 часов 17 минут, что соответствует требованиям ИМО (время прихода в меридиан не должно превышать 6 часов в широтах до 60º). 4. Поправка гирокомпаса, определенная по азимуту небесного светила (планета Сатурн), составила 1.1°, что соответствует требованиям ИМО (0,75·sec (φ)). Для определения использовались астрономический ежегодник “Brown's Nautical Almanac” и сборник навигационных таблиц “Norie’s Nautical Tables”. Проверка осуществлялась по компьютерной программе Skymate Pro 2012. 5. Способом сличения были определены значения поправки и девиации магнитного компаса на разных курсах. Рассчитаны коэффициенты девиации А, B, C, D, E; по ним построена рабочая таблица и кривая девиации. Максимальная девиация составила 6.4º (на курсе 225º), что для остаточной девиации не допустимо, т.к. превышает 5º. С целью исправления сложившейся ситуации, в ближайшем порту по возможности следует выполнить девиационные работы. 6. По результатам трех наблюдений был заполнен журнал поправок компаса в соответствии с требованиями ПДНВ, Рекомендациями по несению штурманской службы и требованиями судоходной компании. 7. Результаты контроля точности приборов курсоуказания сведены в таблицу 8.1.
Таблица 8.1 – Результаты контроля точности приборов курсоуказания
|
||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-26; просмотров: 485; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.144.95.167 (0.009 с.) |


 ˗ Bearing
˗ Bearing =
=  +
+  ˗ d
˗ d = d + δ
= d + δ = ar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>">
= ar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>">  ˗
˗  =
=  – ar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>">
– ar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>"> 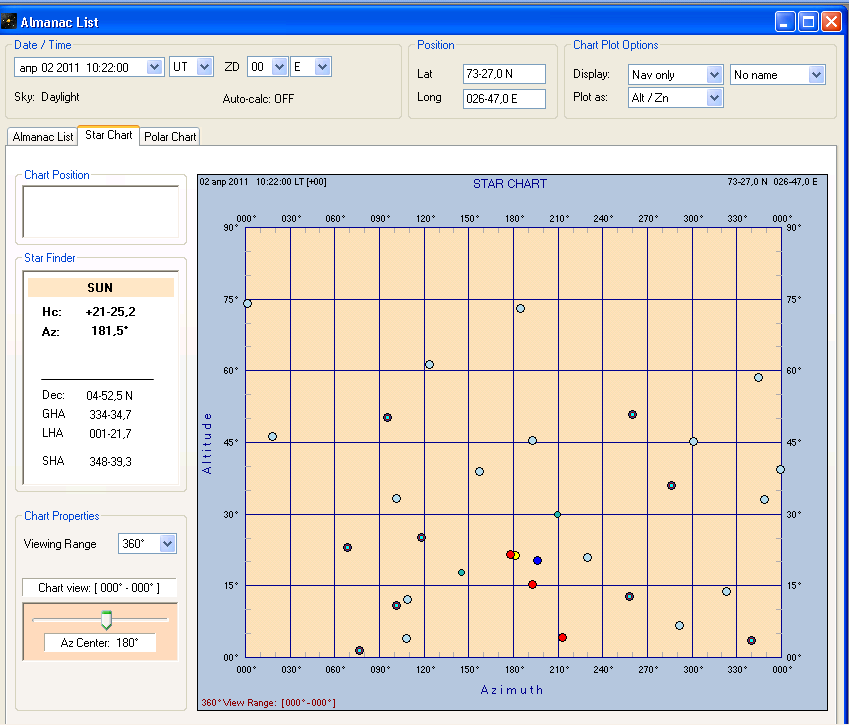
 =
=  +
+  ˗ d
˗ d = d + δ
= d + δ = ar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>">
= ar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>">  ˗
˗  =
=  – ar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>">
– ar w:top="1134" w:right="850" w:bottom="1134" w:left="1701" w:header="720" w:footer="720" w:gutter="0"/><w:cols w:space="720"/></w:sectPr></wx:sect></w:body></w:wordDocument>">