Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Краткое описание установленного гирокомпасаСодержание книги
Поиск на нашем сайте СОДЕРЖАНИЕ Лист задания ………………………………………………………...…………….. 3 Введение …………………………………………………………………………. 4 1. Краткое описание установленного гирокомпаса ……………………….……. 6 2. Анализ скоростной девиации гирокомпаса ………………………….………… 8 2.1. Общие сведения о скоростной девиации ……………………………....… 8 2.2. Определение девиации на курсах 0, 30º, 60º …………………………..… 8 2.3. Определение курсов, на которых девиация превышает целое число градусов …………………………………………………………….. 8 3. Анализ инерционной девиации гирокомпаса ………………………………… 12 4. Расчет времени прихода гирокомпаса в меридиан …………………….…… 13 5. Определение поправки гирокомпаса по азимуту небесного светила …….. 16 6. Определение девиации магнитного компаса ………………………………… 18 7. Заполнение журнала поправок компаса ……………………………………… 22 Вывод …………………………………………………………………………… 28 Список использованных источников …………………………………………. 30
ЛИСТ ЗАДАНИЯ
ВВЕДЕНИЕ В ходе выполнения курсовой работы рассмотрим судно пассажирское судно, совершающее переход в Норвежском море. Цель перехода – перевоз пассажиров согласно туристической программе. Внешний вид судна представлен на рис. 1. Основные характеристики данного судна приведены в таблице 1.
Рис. 1 – Внешний вид пассажирского судна
Таблица 1 – Характеристика рассматриваемого судна
Согласно требованиям СОЛАС (Глава 5, правило 19) к оснащению судов навигационными системами и оборудованием, на данном судне должны быть установлены следующие курсоуказывающие приборы и дополнения к ним:
· главный магнитный компас; · запасной магнитный компас; · действующий девиационный сертификат на главный магнитный компас; · гирокомпас; · пелорус с репитером и пеленгаторным устройством. Информация о курсе, полученная с судовых компасов, необходима для корректной работы следующей навигационной аппаратуры данного судна; · авторулевой; · радар с системой САРП/САС/СЭП; · автоматическая идентификационная система; · компасный монитор; · регистратор данных рейса; · системы дистанционного отображения информации о курсе (репитеры); · коннинг дисплей. Точность бортовых курсоуказателей должна регулярно контролироваться путем периодического определения их поправок. В соответствии с требованиями конвенции ПДНВ, рекомендациями по организации штурманской службы, а также положениями Системы управления безопасностью судна и судоходной компании, поправки курсоуказателей должны определяться, по меньшей мере, один раз за вахту с занесением в специальный журнал поправок. Цель данной курсовой работы – проанализировать точность установленных на судне приборов курсоуказания (гирокомпаса и магнитного компаса), получить навыки определения их поправок, оценить значения возникающих в процессе работы девиаций, научиться понимать их причины. В результате выполнения курсовой работы будет сделан вывод о соответствии курсоуказателей нормативным требованиям ИМО по точности, составлены графики девиаций, определены поправки гироскопического и магнитного компасов, заполнен журнал поправок.
АНАЛИЗ СКОРОСТНОЙ ДЕВИАЦИИ ГИРОКОМПАСА АНАЛИЗ ИНЕРЦИОННОЙ ДЕВИАЦИИ ГИРОКОМПАСА Вычислим инерционную девиацию гирокомпаса после совершения циркуляции с 0° на 180° на полном ходу с падением скорости на 30%. Для решения воспользуемся следующей формулой:
где
Значение скоростной девиации sin Для полученного значения синуса найдем значения девиации:
Подставим полученные данные в основную формулу (3.1):
Следует отметить, что инерционная девиация вследствие совершения циркуляции с 0 на 180° на полном ходу с падением скорости 30% будет иметь максимальное значение сразу после маневра (
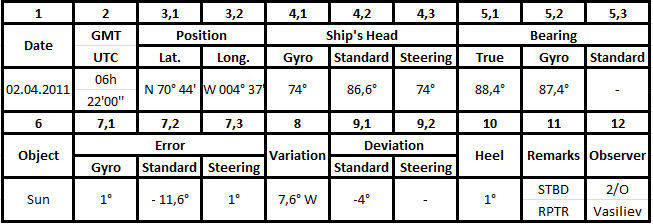
ЗАПОЛНЕНИЕ ЖУРНАЛА ПОПРАВОК КОМПАСА Занесём все полученные данные в таблицу 7.1 Таблица 7.1 – Заполненный журнал поправок компаса
ВЫВОД В результате выполнения курсовой работы, была проанализирована точность бортовых приборов курсоуказания, определены их поправки и девиации основных видов, заполнен журнал поправок. По итогам выполненной работы можно сделать следующие выводы. 1. Максимально возможная скоростная девиация на широте плавания (φ=75°06’N) и при скорости V=26 узл. составляет ± 4.014°. Используемый на судне гирокомпас “Yokogawa CMZ-700” японского производителя Yokogawa Denshikiki Co Ltd. имеет вычислительное устройство (корректор), позволяющее автоматически корректировать данную ошибку по сигналам приемника ГНСС и/или лага. При условии автоматической коррекции сигнал курсоуказания на принимающие приборы поступает уже исправленный и не содержащий в себе скоростную девиацию. 2. Инерционная девиация вследствие резкого разворота на полной скорости и вызванного этим замедления судна на 30% составляет ˗ 3.17°, что соответствует требованиям ИМО. Этот вид девиации имеет место сразу после маневра и исчезает примерно через четверть периода затухающих колебаний (в рассмотренном случае 32 минуты). В течение этого времени не рекомендуется использовать ГК для решения важных навигационных задач. 3. Оценка времени прихода в меридиан составила 5 часов 17 минут, что соответствует требованиям ИМО (время прихода в меридиан не должно превышать 6 часов в широтах до 60º). 4. Поправка гирокомпаса, определенная по азимуту небесного светила (планета Сатурн), составила 1.1°, что соответствует требованиям ИМО (0,75·sec (φ)). Для определения использовались астрономический ежегодник “Brown's Nautical Almanac” и сборник навигационных таблиц “Norie’s Nautical Tables”. Проверка осуществлялась по компьютерной программе Skymate Pro 2012. 5. Способом сличения были определены значения поправки и девиации магнитного компаса на разных курсах. Рассчитаны коэффициенты девиации А, B, C, D, E; по ним построена рабочая таблица и кривая девиации. Максимальная девиация составила 6.4º (на курсе 225º), что для остаточной девиации не допустимо, т.к. превышает 5º. С целью исправления сложившейся ситуации, в ближайшем порту по возможности следует выполнить девиационные работы. 6. По результатам трех наблюдений был заполнен журнал поправок компаса в соответствии с требованиями ПДНВ, Рекомендациями по несению штурманской службы и требованиями судоходной компании. 7. Результаты контроля точности приборов курсоуказания сведены в таблицу 8.1.
Таблица 8.1 – Результаты контроля точности приборов курсоуказания
СОДЕРЖАНИЕ Лист задания ………………………………………………………...…………….. 3 Введение …………………………………………………………………………. 4 1. Краткое описание установленного гирокомпаса ……………………….……. 6 2. Анализ скоростной девиации гирокомпаса ………………………….………… 8 2.1. Общие сведения о скоростной девиации ……………………………....… 8 2.2. Определение девиации на курсах 0, 30º, 60º …………………………..… 8 2.3. Определение курсов, на которых девиация превышает целое число градусов …………………………………………………………….. 8 3. Анализ инерционной девиации гирокомпаса ………………………………… 12 4. Расчет времени прихода гирокомпаса в меридиан …………………….…… 13 5. Определение поправки гирокомпаса по азимуту небесного светила …….. 16 6. Определение девиации магнитного компаса ………………………………… 18 7. Заполнение журнала поправок компаса ……………………………………… 22 Вывод …………………………………………………………………………… 28 Список использованных источников …………………………………………. 30
ЛИСТ ЗАДАНИЯ
ВВЕДЕНИЕ В ходе выполнения курсовой работы рассмотрим судно пассажирское судно, совершающее переход в Норвежском море. Цель перехода – перевоз пассажиров согласно туристической программе. Внешний вид судна представлен на рис. 1. Основные характеристики данного судна приведены в таблице 1.
Рис. 1 – Внешний вид пассажирского судна
Таблица 1 – Характеристика рассматриваемого судна
Согласно требованиям СОЛАС (Глава 5, правило 19) к оснащению судов навигационными системами и оборудованием, на данном судне должны быть установлены следующие курсоуказывающие приборы и дополнения к ним:
· главный магнитный компас; · запасной магнитный компас; · действующий девиационный сертификат на главный магнитный компас; · гирокомпас; · пелорус с репитером и пеленгаторным устройством. Информация о курсе, полученная с судовых компасов, необходима для корректной работы следующей навигационной аппаратуры данного судна; · авторулевой; · радар с системой САРП/САС/СЭП; · автоматическая идентификационная система; · компасный монитор; · регистратор данных рейса; · системы дистанционного отображения информации о курсе (репитеры); · коннинг дисплей. Точность бортовых курсоуказателей должна регулярно контролироваться путем периодического определения их поправок. В соответствии с требованиями конвенции ПДНВ, рекомендациями по организации штурманской службы, а также положениями Системы управления безопасностью судна и судоходной компании, поправки курсоуказателей должны определяться, по меньшей мере, один раз за вахту с занесением в специальный журнал поправок. Цель данной курсовой работы – проанализировать точность установленных на судне приборов курсоуказания (гирокомпаса и магнитного компаса), получить навыки определения их поправок, оценить значения возникающих в процессе работы девиаций, научиться понимать их причины. В результате выполнения курсовой работы будет сделан вывод о соответствии курсоуказателей нормативным требованиям ИМО по точности, составлены графики девиаций, определены поправки гироскопического и магнитного компасов, заполнен журнал поправок.
КРАТКОЕ ОПИСАНИЕ УСТАНОВЛЕННОГО ГИРОКОМПАСА В соответствии с заданием на описываемом судне установлен гирокомпас «Yokogawa CMZ-700». Внешний вид гирокомпаса (ГК) представлен на рисунке 1.1.
Рис. 1.1 – Внешний вид ГК «Yokogawa CMZ-700»
Гирокомпас «CMZ700» — гирокомпас от японского производителя Yokogawa Denshikiki Co Ltd., сертифицированный Российским Речным Регистром и Российским морским регистром судоходства. Данная система предназначена для определения курса судна относительно географического (истинного) севера. Гирокомпас Yokogawa CMZ700 имеет гибкую конфигурацию и может адаптироваться для установки на судно любого типа и тоннажа. Гирокомпас работает очень мягко и без запаздывания, это очень удобно для небольших катеров и моторных яхт. Уникальная противовибрационная система, использующая свойство вязкого масла демпфировать внешние факторы, значительно уменьшает влияние вибрации и внешних сотрясений. Данные выводятся на встроенный дисплей или на внешние устройства. Доступны три модификации гирокомпаса Yokogawa «CMZ700»: · CMZ700B - управляет репитерами напрямую с осноновного блока компаса без блока управления; · CMZ700S - блок управления имеет различные входы/выходы, что делает прибор удобным для судов любого типа; · CMZ700D - 2х-блочный вариант, обеспечивает высокую надежность. В состав комплекта гирокомпаса входят: · Мастер-компас MKM022 (2 мастер-компаса для CMZ700D); · Блок управления MKC320 (для CMZ700S) или MKC321 (для CMZ700D); · AC адаптер MKR027; · AC адаптер MKS066 (для CMZ700D). Основные характеристики гирокомпаса Yokogawa «CMZ-700», заявленные изготовителем, приведены в таблице 1.1.
Таблица 1.1 – Характеристики гирокомпаса Yokogawa «CMZ-700»
Гирокомпасы серии «Yokogawa» при невысокой стоиомости является высоконадежным изделием. Они зарекомендовали себя надежными навигационными приборами, в которых воплощены достижения японских технологий и непревзойденное качество.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-26; просмотров: 1536; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.41 (0.008 с.) |



 = (
= ( ˗
˗  )·(
)·( ˗ 1) (3.1)
˗ 1) (3.1) – конструктивная широта.
– конструктивная широта. = ˗ 0.7 ·
= ˗ 0.7 ·  = 0.0049
= 0.0049 ) = ˗ 3.17°
) = ˗ 3.17°