
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Опыт короткого замыкания трансформатораСодержание книги Поиск на нашем сайте
Проводится по схеме в соответствии с рисунком 13.2. При этом опыте обмотка низшего напряжения испытуемого трансформатора замкнута накоротко через амперметр, а к обмотке высшего напряжения подводится пониженное напряжение такой величины, при котором в обеих обмотках протекают номинальные токи. Постепенно увеличивая напряжение на входе трансформатора от нуля, доводят его до такой величины, при которой ток во вторичной накоротко замкнутой обмотке I2 достигает величины 3,7 А (номинальный ток). При этом значении тока I2 измеряют мощность, потребляемую трансформатором Р1: напряжение Uкз и токи I1 и I2. Мощность короткого замыкания и коэффициент мощности определяется: Ркз = 3Р1; Коэффициент полезного действия трансформатора определяется по данным обоих опытов. Мощность, потребляемая трансформатором в опыте холостого хода, есть мощность потерь в стали сердечника трансформатора: Рхх = ΔРстали. Мощность потерь при опыте короткого замыкания есть мощность потерь в обмотках (меди) трансформатора: Ркз = ΔРмеди. К.п.д. трансформатора для номинального режима работы определится:
где Рхх – берется из опыта холостого хода при номинальном фазном напряжении U1 = 220 В; Ркз – берется из опыта короткого замыкания. Для расчётов принять Рном = 1500 Bт.
Контрольные вопросы
1. Почему при опыте холостого хода считают, что потребляемая мощность определяет потери в стали при номинальном режиме, а в опыте короткого замыкания только потери на нагрев обмоток? 2. Что называется коэффициентом трансформации? Можно ли его измерить при рабочем режиме трансформатора? 3. Сформулируйте условия, при которых проводятся опыты холостого хода и короткого замыкания для расчета кпд трансформатора.
Лабораторная работа № 14
Изучение аппаратуры управления и зашиты
Цель работы: ознакомиться с различными типами аппаратуры управления и защиты, ее устройством, принципом работы, правилами выбора, схемами включения.
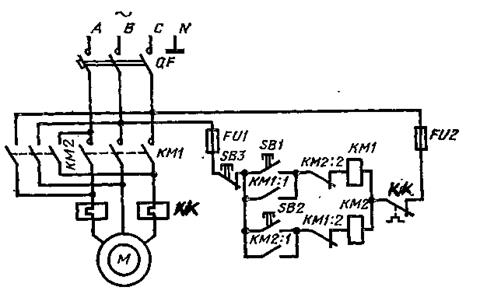
Программа работы 1. Изучить назначение, устройство, принципы работы, типы применяемой аппаратуры управления и защиты и их технические характеристики. 2. Собрать схемы включения трехфазного двигателя с помощью нереверсивного и реверсивного магнитных пускателей и осуществить пуск двигателя (рис. 14.1).
Рис. 14.1
3. Выбрать аппаратуру управления и защиты для подключения трехфазного потребителя заданной мощности (по заданию преподавателя).
Теоретические положения
Аппаратура управления предназначена для включения и выключения электрических цепей под нагрузкой (пусковая аппаратура) или без нее (коммутационная аппаратура). Аппаратура защиты должна обеспечивать отключение поврежденных участков или всего потребителя при нарушениях нормального режима его работы (короткие замыкания, длительные перегрузки, снижение изоляции или напряжения ниже допустимых пределов и др.). По принципу действия различают аппаратуру неавтоматического (ручного) управления и автоматического управления, позволяющей персоналу управлять ею дистанционно или передать функции управления специальным техническим средствам (командные аппараты, процессор, системы автоматического управления). По исполнению (степени защити от воздействия окружающей среды) аппараты выпускаются открытие, защищенные, пылеводозащищенные, взрывозащищенные и другие.
Аппаратура ручного управления
Эта аппаратура предназначена для ручного замыкания и размыкания электрических цепей. Рубильники и переключатели по конструктивному исполнению подразделяются на одно-, двух- и трехполюсные с центральной или боковой рукояткой, а также с боковым или центральным рычажным приводом. Эти аппараты выбирают по номинальному току и напряжению, указанным на них, а также по условиям окружающей среды. Допустимый рабочий ток и напряжение в цепи не должны превышать номинальных значений для аппарата. Рубильники и переключатели выпускаются на номинальные токи до 1000 А и напряжение 440 В постоянного тока, 500 В переменного тока. Аппаратами с центральной рукояткой можно размыкать только обесточенные цепи, т.е. без нагрузки. Другими аппаратами можно пользоваться и под нагрузкой, имея в виду, что если нет специальных дугогасящих устройств, то предельно допустимые токи отключения составляют 0,21 Н на постоянном токе при напряжении до 220 В и 0,31 Н на переменном токе при напряжении до 380 В. Рубильники выпускаются типов Р, РБ, РПБ, РПЦ, а переключатели – типов П, ПВ, ПБ, ППЦ. Первая буква в маркировке типов означает: Р – рубильник, П – переключатель; вторая: Б – боковая рукоятка, П – наличие привода; третья: Б – боковой, Ц – центральный привод.
Пакетные выключатели и переключатели применяются в цепях постоянного тока напряжением до 220 В и переменного тока напряжением до 380 В. Они получили широкое распространение в производственных осветительных сетях и в качестве пускателей асинхронных двигателей небольшой мощности. Выпускаются аппараты типов ПВ и ПП одно- и многополюсные (до семи полюсов) на токи до 400 А. В открытом брызгонепроницаемом (защищенном) и герметическом исполнениях. Если напряжение сети превышает 220 В, то номинальный ток берется на 40%меньше указанного для данного типа. Пример расшифровки: ВПК 3-10 – выключатель пакетный, защищенного исполнения (К), трехполюсный, номинальный ток 10 А; ГПП 3-400/Н2 – герметический (Р) переключатель пакетный, трехполюсный, номинальный ток 400 А, на два направления. Барабанные переключатели типа БП предназначены для ручного включения, отключения, реверсирования асинхронных двигателей, а также для переключения цепей вторичной коммутации. Выпускаются на номинальные токи до 50 А открытого и защищенного исполнения. Универсальные переключатели типа УП-5000 применяются для включения маломощных цепей, в схемах автоматического управления, в качестве переключателей измерительных приборов и т.п. Они могут объединять до 16 секций и иметь до восьми положений рукоятки. Выбирают универсальные переключатели по диаграмме переключения (рис. 15.2), отражающей состояние контактов (замкнуты или разомкнута) при изменении положения рукоятки, по номинальному напряжению, рабочему и отключенному току, а также с учетом степени защиты от окружающей среды. На рисунке 14.3 дается изображение контактов переключателя. Точка означает замкнутое состояние контакта при данном положении переключателя. Эти данные публикуются в каталогах выпускаемой аппаратуры. Кроме рассмотренной аппаратуры применяется и другая: командные переключатели, командоаппараты, контроллеры, реостаты и другая аппаратура.
Рис. 14.3. Диаграмма состояний 5-и позиционного переключателя и изображение на схеме
Путевые и конечные выключатели и переключатели используют для коммутации цепей управления в зависимости от пространственного положения контролируемых частей оборудования. Например, для ограничения хода кормораздаточных транспортеров, в станочном оборудовании» подъемно-транспортных устройствах и т.п. Конечные выключатели и переключатели механического действия выпускаются следующих типов: ВК-111, ВК-411, ВК-511 немгновенного действия и ВК-211, ВК-311 мгновенного действия. Условное обозначение расшифровывается так: В – выключатель; К – конечный, первая цифра определяет конструктивные особенности, вторая – количество замыкающих, третья – размыкающих контактов. Выбираются они по номинальному напряжению току в зависимости от скорости и направления перемещения нажимного устройства с учетом условий окружающей среды. Выпускаются так же более надежные бесконтактные конечные выключатели индукционные типов ИКВ-10, ИКВ-22, ИКВ-30 и БВК-24. Принцип их работы заключается в изменении индуктивного сопротивления и разбалансировки моста при появлении в зоне контроля магнитного шунта Ш.
Аппаратура автоматического управления
Контакторы постоянного и переменного тока – наиболее распространенные аппараты в схемах дистанционного и автоматического управления. В зависимости от способа действия различают электромагнитные, гидравлические и пневматические контакторы. Контакторы постоянного тока типа КП выпускают на токи от 20 до 2500 А в одно-, двух-, трех- и четырехполюсном исполнении с размыкающими и замыкающими контактами. Контакторы переменного тока типа КП выпускают одно-, двух-, трех-, четырех- и пятиполюсном исполнении 1, П, Ш, 1У, У величин на номинальные токи от 50 до 600 А и напряжение 220, 440 и 660 В. Магнитные пускатели представляют собой комплектные устройства, состоящие из одного или двух (реверсивные пускатели) контакторов переменного или постоянного тока. В магнитном пускателе могут устанавливаться тепловые реле. Магнитные пускатели совмещают функции дистанционного управления двигателями (включение, отключение, реверсирование) и защиты (от снижения, от перегрузок, если есть тепловое реле, от самозапуска двигателя при кратковременном снятии напряжения). Пускатель имеет, как правило, три пары главных силовых контактов и несколько вспомогательных контактов (блок-контакты) замыкающих и размыкающих. Пускатель состоит из корпуса, на котором устанавливается магнитная система (подвижная и неподвижная части), электрической катушки и контактов. С подвижной частью магнитной системы связаны подвижные части контактов. С устройством познакомьтесь непосредственно на оборудовании. Состояние контактов (замкнутое или разомкнутое) зависит только от наличия тока в катушке. Если тока нет, то состояние контактов определяется конструктивным исполнением, и в таком положении они изображаются на схемах. А когда на катушку подается напряжение, подвижная часть магнитной системы притягивается к неподвижной, перемещение магнитной системы приводит к изменению состояния контактов: разомкнутые контакты сомкнутся, замкнутые – разомкнутся. В настоящее время широко применяются пускатели серии ПМЕ и ПАЕ. Номинальные токи пускателей от 2,5 до 150 А. Ток определяет «величину» пускателя. Пускатели серии ПМЕ выпускаются 0, 1, и 2-й величины, а ПАЕ – 3, 4, 5 и 6-й величин. Пускатели обеспечивают управление двигателями от 1 до 75 кВт при напряжении 380 В.
После буквенного обозначения серии пускателей стоят три цифры, первая – от 0 до 6 отражает величину пускателя, вторая – цифра отражает исполнение: 1 – открытое; 2 – защищенное; 3 – пылеводозащищенное. Третья цифра от 1 до 4 означает: 1 – нереверсивный пускатель без тепловой защиты; 2 – то же с тепловой защитой; 3 – реверсивный пускатель без тепловой защиты; 4 – реверсивный с тепловой защитой. Пускатели выбирают по величине с учетом мощности двигателя и напряжения сети, а также по исполнению в зависимости от условий окружающей среды.
Защитная аппаратура
К защитной аппаратуре относят автоматические выключатели, тепловые реле, реле максимального тока, реле напряжения, плавкие предохранители. Автоматические воздушные выключатели (автоматы), предназначены для ручного включения и выключения потребителей, а также для автоматического отключения в аварийных режимах (перегрузки, короткие замыкания, снижение напряжения ниже допустимого предела). Наибольшее распространение получили автоматы серии А3000 и АП50. Эти автоматы могут иметь тепловой расцепитель, осуществляющий защиту от перегрузок и токов короткого замыкания (выключатели 1-й величины); электромагнитный расцепитель – для выключателей 2-й, 5-й величин, мгновенно отключающий токи, превышающие ток уставки; и комбинированный расцепитель, имеющий и тепловой и электромагнитный элемент. В автоматах АП50 могут быть и расцепители минимального напряжения. В автоматах серии А3000 номинальные параметры находятся по каталогу. Автоматы АП50 расшифруем на примере одного из типов: АП50 – 2М3ТН: А – автомат; П – промышленный; 50 – наибольший номинальный ток; 2М – два расцепителя магнитных; 3Т – три тепловых расцепителя; Н – расцепитель минимального напряжения. Автоматы применяются в сетях переменного тока напряжением до 500 В. Выбирают автомат по рабочему току цепи с выполнением условия: номинальный ток уставки должен быть не меньше рабочего тока – цепи. Автомат не должен отключать установку при пусковых токах и перегрузках, допустимых при нормальной эксплуатации. По рабочему току выбираем уставку теплового расцепителя:
Iуст. = 1,25 Iраб..
Номинальный ток автомата:
Iном. а ≥ I уст.. Проверяем, чтобы электромагнитный расцепитель не срабатывал при пусковом токе:
Iср. эм > Iпуск.
Кроме того необходимо, чтобыдопустимый ток короткого замыкания автомата былбольше возможного тока короткого замыкания на участке цепи. Обычно это условие выполняется. Плавкие предохранители наиболее простые и дешевые из аппаратов, предназначенных для защиты электрических цепей от коротких замыканий, а также от чрезмерных перегрузок. В предохранителях выключающим элементом является плавкая вставка – легкоплавкая проволока или пластинка, перегорающая при определенной величине тока за определенное время. Плавкая вставка размещается в корпусе, рассчитанном на определенное напряжение сети и величину тока. Номинальным током предохранителя называется максимально допустимый ток плавкой вставки, которую можно устанавливать в данном предохранителе.
Номинальным током плавкой вставки называется ток, при котором она должна длительно работать, не расплавляясь и не нагреваясь свыше допустимой температуры (60-700С). Из зависимости от времени срабатывания предохранителя (перегорания плавкой вставки) следует, что предохранитель надежно работает при 3-кратных и более перегрузках по току, т.е. в основном он используется для защиты от коротких замыканий. При меньших перегрузках его время срабатывания значительно и оборудование за это время может выйти из строя.
Выбор предохранителя
Номинальный ток плавкой вставки Iпл.в выбирается из условия, чтобы он был не меньше длительного рабочего тока в цепи Iраб.:
Iпл.в ≥ Iраб..
Когда используются асинхронные двигатели, имеющие большой пусковой ток, плавкую вставку приходится завышать, чтобы она выдерживала, не перегорая, пусковой ток. Для одиночного двигателя выбор осуществляется по формуле:
где Iном.дв. – номинальный ток двигателя; Кi -кратность пускового тока (от 5 до 7); α – коэффициент, учитывающий условия пуска; α = 3 при редких пусках продолжительностью до 2,5; α = 2,5 при нечастые пусках продолжительностью от 2,5 до 10 с. α = 2-1,6 при частых пусках продолжительностью более 20 с. Для защиты группы потребителей должно выполняться условие: плавкая вставка не перегорает, если при одновременно работающих потребителях, что определяется технологическими особенностями производства, происходит запуск двигателя, имеющего наибольший пусковой ток, т.е. будет применяться формула:
Здесь α отражает условия пуска двигателя с максимальным пусковым током. Окончательный выбор токов плавких вставок групповых предохранителей определяется требованием селективности (избирательности) действия защиты: предохранитель, защищающий группу потребителей, должен срабатывать позже любого одиночного предохранителя из этой группы. На практике это требует увеличения номинального тока плавкой вставки группового предохранителя на ступень выше одиночного, если даже по расчету он получается таким же, как одиночный. С учетом расчетных токов плавких вставок и напряжения сети выбирается тип предохранителя. Промышленностью выпускаются следующие типы предохранителей: а) пробочные – для цепей управления типа ПЦУ на токи 1, 2, 3, 4, 6 А; для двигателей – ПД и ГДС на токи 6, 20, 60, 125, 350 и 600 А; б) трубчатые серии ПР-2 с закрытым разборным патроном без наполнителя на номинальные токи 15, 60, 100, 200, 350, 600 и 1000 А при напряжении 220 В (короткие) и 500 В (длинные). При напряжении 380 В допускается применение тех и других. Гашение дуги при перегорании плавкой вставки идет за счет выделения газа из корпуса патрона, выполненного из фибры; в) серии ПН-2 (предохранитель с наполнителем, корпус фарфоровый) на токи 100, 250, 400, 600 и 1000 А и напряжения до 500 В. Сменные плавкие вставки для предохранителей выпускают на широкий токовый диапазон: 6, 10, 15, 20, 25, 30, 40, 50, 80, 100, 120, 150, 200, 250, 300, 400 А. Серьезным недостатком предохранителей является нестабильность защитной характеристики. Кроме того сгорание одного предохранителя трехфазных потребителей переводит их в режим однофазный. При этом двигатель, например, может выйти из строя из-за уменьшения его мощности и, как следствие, возрастания тока при неизменной нагрузке. Тепловые реле имеют главное назначение – защитить двигатель от небольших длительных перегрузок. Они применяются в сочетании с контактором переменного или постоянного тока, обеспечивая отключение последнего при срабатывании защиты. Реле имеют два основных элемента: биметаллическую пластину, нагреваемую рабочим током двигателя, и размыкающий контакт реле, который включается последовательно с катушкой контактора. При чрезмерном нагреве пластины она изгибается и контакт реле размыкается. Нагрев может быть косвенным: нагревательный элемент включен в цепь питания двигателя, а биметаллическая пластина нагревается за счет тепла, выделяемого в этом элементе при прохождении тока; и прямым – когда рабочий ток проходит прямо по пластине, нагревая ее, есть также реле с комбинированным нагревом. Как и предохранители, реле выбираются по максимально допустимому току для данного типа реле, а нагревательные элементы применяют сменные с более широким токовым диапазоном. Правило выбора теплового реле:
Iт.р. = 1,05 ÷ 1,2 I ном.дв..
Применяются тепловые реле двухполюсные ТРН на токи 10, 15,40 А и ТРП на токи 60 и 150 А. Они встраиваются в магнитные пускатели серий ПМЕ и ПАЕ. Кроме того есть однополюсные реле ТРА, ТРВ на номинальные токи от 7 до 200 А. Реле могут иметь регулировку ± 25% их номинального тока. Токовые реле. Это электромагнитные реле, катушка которых включается последовательно в цепи главного тока, а контакты его используют в цепях упрощения (например, размыкание цепи катушки магнитного пускателя). Реле обеспечивают защиту и от перегрузок и от коротких замыканий. Ток срабатывания можно регулировать изменением числа витков катушки реле, включенных в цепь тока или схемой соединения этих витков. Кроме того есть механическая регулировка: натяжением пружиы удерживающей магнитную систему. Выбираются и регулируются по величине допустимого тока перегрузки. Реле напряжения. Отличаются от токовых реле тем, что катушка их имеет большое количество витков и включается параллельно источнику тока. Реле срабатывает при определенном напряжении, на которое оно выполнено и отключается, если напряжение понизилось. Это используется для отключения потребителя при недопустимом снижении напряжения. Примечание. Характеристики пускателей и тепловых реле приведены на стенде лаборатории.
Контрольные вопросы
1. В чем разница между пусковой и коммутационной аппаратурой? 2. Устройство контактора переменного тока и принцип работы. 3. По каким параметрам выбирается пусковая аппаратура? 4. Основные типы магнитных пускателей. Расшифровка цифровых обозначений в типах магнитных пускателей. 5. Как выбираются и настраиваются тепловые реле? 6. Выбор одиночных и групповых предохранителей. 7. Какие требования к селективному действию защиты?
Лабораторная работа № 15
Испытание машины постоянного тока (МПТ) в режиме двигателя
Цель работы: изучить устройство, принцип действия, схемы включения машин постоянного тока.
Программа работы 1. На действующем макете изучить устройство МПТ. 2. Проверить наличие механических и электрических неисправностей рабочей МПТ. 3. Изучить схемы включения МПТ в режиме двигателя при различных способах возбуждения и осуществить пуски и реверсирование. При пуске двигателя реостат R1 необходимо полностью ввести. 4. Собрать схему МПТ с независимым возбуждением (рис. 15.1) и провести две серии экспериментов: а) при неизменном токе возбуждение I2 = Iвн = const (R2 = 0, реостат выведен). автотрансформатором АТ изменять напряжение на якоре от Uн до 0,5 Uн и фиксировать частоту вращения n0. Получить зависимость n0 = f (U) и построить график; б) при неизменном напряжении на якоре U = Uн реостатом R2 изменять ток возбуждения от Iвн до 0,5 Iвн, фиксируя частоту вращения n0. Построить график этой зависимости n0 = f (Iв). Данные экспериментов занести в таблицу 15.1.
Таблица 15.1
5. Собрать схему для получения механической характеристики двигателя n = f (M). Для этого необходимо подключить к питанию обмотки электрического тормоза (ЭТ) (пунктир на рис. 15.1). Изменяя реостатом R3 ток ЭТ от 0 до 1,5 А, фиксировать значения тока якоря I1 и напряжения U, а также частоты вращения n. Данные занести в таблицу 15.2, рассчитать момент и построить естественную механическую характеристику (R1 = 0). Введя сопротивление R1, получить и построить реостатную характеристику, проведя аналогичный эксперимент.
Таблица 15.2
Внимание! В данной работе при каждом пуске двигателя реостат R1 в цепи якоря необходимо полностью вводить и затем постепенно вывести.
Рис. 15.1
Теоретические положения
Устройство МПТ. Машина состоит из двух основных частей: неподвижная часть – статор, или индуктор, подвижная – якорь. Статор включает в себя корпус (станина), главные и дополнительные полюса, на которых расположены обмотки возбуждения; щеткодержатель, обеспечивающий соединение с обмоткой якоря; клеммную коробку с выводами от обмоток возбуждения и якоря, подшипниковые щиты. Назначение статора – создать постоянное магнитное поле. Магнитный поток Ф замыкается по станине, отлитой из стали, и пронизывает магнитопровод и обмотку якоря. Якорь состоит из вала, на котором установлены подшипники; на вал напрессован магнитопровод, набранный из листовой электрической стали; в пазах магнитопровода расположена обмотка якоря, выводы которой припаяны к пластинам коллектора. Коллектор является механическим преобразователем тока: переменного в постоянный (режим генератора) и наоборот (в режиме двигателя). МПТ, как и все электрические машины, обладают свойством обратимости, т.е. могут работать в режиме генератора и электродвигателя. В первом случае энергию магнитного поля, созданную статором, и механическую энергию, а во втором электрическую энергию, потребляемую статором и якорем, они превращают в механическую работу вращения электродвигателя. Режим двигателя. Во всех электродвигателях используются механические силы, воздействующие на помещенные в магнитное поле проводники с токами. На прямолинейный проводник l с током I в магнитном поле действует механическая сила F,стремящаяся сместить его в плоскости, перпендикулярной направлению вектора индукции В. Для определения направления этой силы служит правило левой руки: ладонь нужно поставить так, чтобы магнитные линии в нее входили (т.е. навстречу направлению В); четыре пальца вытянуть по направлению тока вдоль проводника; отогнутый большой палец покажет направление действующей на проводник механической силы. Эта сила называется электромагнитной силой,так как является следствием взаимодействия тока и магнитного поля.
Правило левой руки
Электромагнитная сила в равномерном поле пропорциональна произведению магнитной индукции В на ток I, а также активной длине проводника l (т.е. длине части проводника, находящейся в магнитном поле). У большинства машин и аппаратов проводники расположены практически перпендикулярно направлению вектора В, в этом случае сила равна:
F = B I l. Обмотка якоря выполняется в виде витков, верхняя часть которых расположена под одним полюсом магнитного поля статора, а нижняя – под другим. Следовательно, на нижнюю часть витков сила действует в противоположном направлении, т.е. в результате взаимодействия магнитного поля статора с током якоря образуется крутящий момент, величина которого определяется конструктивными параметрами двигателя:
М = kФIя, (15.1)
где Ф = ВS – магнитный поток, создаваемый обмоткой возбуждения; S – площадь магнитного полюса в сечении. Из формулы (16.1) следует, что направление момента зависит от направления магнитного поля и тока якоря, изменяя одно из которых, можно изменить направление вращения двигателя. Но обычно это делают, изменяя направление тока в якоре. Как только двигатель завращался, витки его обмоток пересекают магнитное поле статора, и в них наводится ЭДС, направление которой по принципу Ленца противоположно силам, ее вызывающих (в данном случае току якоря и напряжению), и определяется правилом правой руки.
Правило правой руки
Тогда для цепи якоря (рис. 15.2) при любом способе возбуждения
по второму закону Кирхгофа имеем:
где R – включает в себя, помимо сопротивления обмотки якоря, и сопротивления последовательной обмотки возбуждения, пускового реостата, если таковые имеются; Е = kωФ – противо ЭДС.(15.3)
В МПТ применяют различные способы возбуждения: а) постоянные магниты (для машин небольшой мощности); б) электромагниты с обмотками возбуждения. В этом случае имеются четыре схемы включения обмоток возбуждения и якоря: 1) независимое возбуждение – обмотка возбуждения (ОВ) запитана независимо от якоря; 2) параллельное возбуждение – ОВ включена параллельно якорю на один источник питания; 3) последовательное возбуждение – ОВ включена последовательно с якорем; 4) смешанное возбуждение – одна из ОВ включается последовательно, вторая параллельно.
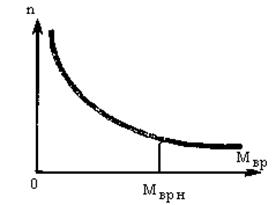
Применяется следующая маркировка выборов МПТ: Я1Я2 – обмотка якоря, если Д2 – последовательно с якорем включена обмотка дополнительных полюсов; Ш1Ш2 – обмотка параллельного возбуждения; С1С2 – обмотка последовательного возбуждения. Применяемая схема возбуждения определяет главное свойство двигателя – его механическую характеристику: зависимость частоты вращения от величины нагрузки (момента) на валу двигателя: n = f (M). Механическая характеристика приведена на рисунке 15.3. соответственно: а – для независимого и параллельного возбуждения; б – для последовательного возбуждения; в – для смешанного возбуждения.
а)
б)
в)
Рис. 15.3
Основные особенности механических характеристик
1. У двигателей независимого и параллельного возбуждения характеристики жесткие (небольшое отклонение от горизонтали), т.е. при изменении нагрузки частота вращения изменяется незначительно. Но при этом, зная, что потребляемая мощность Р может быть рассчитана по формуле:
практически она возрастает пропорционально моменту. А так как P = UI, то соответственно возрастает и ток. 2. Двигатели с последовательным возбуждением имеют мягкую характеристику, поэтому при работе с переменной нагрузкой потребляемая мощность изменяется незначительно. Эти двигатели нельзя запускать вхолостую (при М = 0), т.к. они идут «в разнос» (n0 → ∞). На них нельзя применять ременные передачи. Минимальная нагрузка при запуске двигателя должна быть не менее 0,1-0,15 Мн. 3. Двигатели со смешанным возбуждением в зависимости от степени влияния параллельной или последовательной обмоток возбуждения могут иметь характеристики в зоне между характеристиками 1 и 2. Наличие параллельной обмотки возбуждения исключает возможность двигателя идти «в разнос» при пуске вхолостую, обрыве ременной передачи или при проскальзывании ремня. Предпусковые мероприятия. Повреждения электродвигателей, препятствующие его пуску, можно подразделить на механические и электрические. Исправный в механическом отношении двигатель не должен иметь трещин на корпусе, подшипниковых щитах, клеммной коробке. Все болтовые соединения должны быть плотно затянуты. Якорь двигателя должен свободно проворачиваться от руки, не задевая за полюса. Не должно быть поперечного и продольного люфта. Щеткодержатель должен обеспечивать плотное прилегание щеток к коллектору по всей их площади. Коллектор не должен иметь неровностей (отдельных выступающих пластин или изоляции между ними). Все это проверяется при внешнем осмотре двигателя, и при необходимости устраняются замеченные неисправности. В электрическом отношении у двигателя проверяется правильность маркировки выводов обмоток, их целостность (отсутствие обрывов), отсутствие замыканий между обмотками и обмотками на корпус, а также измеряют сопротивление изоляции между обмотками и обмотками и корпусом, которое должно быть не менее 0,5 МОм. Правильность маркировки и отсутствие обрывов проверяется омметром. Параллельную и последовательную обмотки возбуждения можно различить по величине сопротивления (у параллельной обмотки оно гораздо больше). Выводы обмотки якоря проверяются соединением одной клеммы омметра с пластиной коллектора, а другой – с выводами маркировки якоря. Если омметр показывает маленькое сопротивление (доли Ома), это выводы обмотки якоря. Сопротивление изоляции измеряется мегомметром. Пуск двигателей. Применяют следующие способы пуска: 1) прямой, когда подается номинальное напряжение без каких-либо изменений в схемах, представленных на рисунке 15.2; 2) пуск на пониженном напряжении; 3) пуск при введении реостата в цепь якоря. Из механических характеристик видно, что при пуске (n = 0) для всех двигателей пусковой момент и, соответственно, пусковой ток будут иметь большие значения, т.е. без специальных мер наблюдаются значительные механические и электрические перегрузки, опасные для конструкции двигателя. Так, пусковой ток может быть в 20-40 раз больше номинального. Поэтому прямой пуск применяется только для маломощных двигателей (до 5 кВт). В остальных случаях применяются второй или третий способы. Более экономичен пуск на пониженном напряжении, но при этом необходимо более сложное оборудование, чем реостат. Регулирование частоты вращения. Используя уравнения (15.2) и (15.3) получим уравнение скоростной характеристики: ω = f (Iя);
из которого вытекают возможные способы регулирования частоты вращения: изменением подводимого напряжения U, магнитного потока обмотки возбуждения, введением дополнительного сопротивления в цепь якоря. При постоянных U и R для двигателей с независимым и параллельным возбуждением скоростная характеристика линейна, т.к. Ф тоже постоянно. Для последовательного и смешанного возбуждения она нелинейна, т.к. Ф последовательной обмотки зависит от Iя.
Контрольные вопросы
1. Устройство и принцип действия МПТ в режиме двигателя. 2. Способы пуска двигателя. 3. Как изменить направление вращения двигателя? 4. Как определить направление вращения при известной полярности полюсов и направлении тока в обмотке якоря? 5. Достоинства и недостатки механических характеристик двигателей с разными способами возбуждения. 6. Как можно изменить частоту вращения двигателя при постоянной нагрузке? 7. Какие механический повреждения двигателя не позволяют включить его в работу? 8. Перечислите возможные электрические повреждения в МПТ и способы их обнаружения. 9. Способы возбуждения МПТ.
Типовые задачи по курсу электротехнике с основами электроники
Глава 1. Расчет простых цепей постоянного тока Последовательное соединение (делитель напряжения). Расчет сводится к применению закона Ома при замене соединения эквивалентным сопротивлением R.
R = R1 + R2 + R3;
U = U1 + U2 + U3.
Параллельное соединение
Пренебрегая сопротивлением проводов, можно считать, что одной стороной резисторы присоединены к одному полюсу источника, другой – ко второму, т.е. напряжение на них одинаково (U).
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| Поделиться: |

 .
. .
.



 ,
, .
.



 , (15.2)
, (15.2)


 , (15.4)
, (15.4)

 ;
;


