Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Пристрої для виконання земляних і навантажувально-розвантажувальних робітСодержание книги
Поиск на нашем сайте
Авторське свідоцтво СРСР N2 1027338. Автори: П.И. Неміровській, В.И. Репнев, Б.А. Емельянов, В.Г. Бут,.А. Брайковській, З.Н. Кузин, Б.Ю. Маліновській, Б.Н. Бухбіндер, А.С. Соловйов і Я.С. Сорін. 1) Пристрій для виконання земляних і навантажувально-розвантажувальних робіт, включаюче встановлену на самохідному шасі поворотну платформу, стрілу і дві рукояті з робочими органами, поворотні навколо подовжньої осі і в площині, що проходить через їх подовжні осі, відмінні тим, що, з метою розширення технологічних можливостей, забезпечено проміжною ланкою, шарнірно пов'язаною із стрілою з можливістю повороту в площині підйому стріли, а рукояті встановлені на проміжній ланці з можливістю обертання навколо його подовжньої осі і поворотно-поступального переміщення уздовж його подовжньої осі. 2) Пристрій по п.l, відмінний тим, що проміжна ланка порожнистим елементам, і корпуси механізму повороту рукоятей в площині, що проходить через їх подовжні осі, встановленого з можливістю обертання усередині порожнистого елементу, причому механізм повороту рукоятей в площині, що проходить через їх подовжні осі, виконаний у вигляді зубчатої передачі, ланки якої виконані у вигляді зубчатих секторів, на яких встановлені рукояті, і приводу. 3) Пристрій по п. 1 і 2, відмінне тим, що механізм поворотно-поступального переміщення рукоятей уздовж подовжньої осі проміжної ланки виконаний у вигляді гідроциліндра, шток якого сполучений з порожнистим елементом, а корпус закріплений на кожусі проміжної ланки. 4) Пристрій по п. 1 і 2, відмінне тим, що механізм обертання рукоятей навколо подовжньої осі проміжної ланки виконаний у вигляді гідромотора, встановленого на порожнистому елементі, і черв'ячної передачі, черв'ячне колесо якої встановлене на корпусі механізму повороту рукоятей в площині, що проходить через їх подовжні осі. 5) Пристрій по п.l і 2, відмінне тим, що привід повороту рукоятей в площині, що проходить через їх подовжні осі, виконаний у вигляді гідроциліндра, шток якого шарнірно сполучений з одним із зубчатих секторів, а корпус шарнірно укріплений в корпусі механізму повороту рукоятей. 6) Пристрій по п. 1 і 2, відмінне тим, що механізм обертання кожної рукояті навколо своєї подовжньої осі виконаний у вигляді гідромотора і черв'ячної передачі, встановлених відповідно на кожному зубчатому секторі механізму повороту рукоятей, а кожна рукоять відповідно встановлена на вихідному валу черв'ячної передачі.
Відомо будівельна машина, що призначена для виконання як земляних, так і навантажувально-розвантажувальних робіт, містить шасі, поворотну платформу, стрілу, рукоять і ківш з щелепою. Ківш приєднаний до рукояті за допомогою двох шарнірної вставки з взаємно перпендикулярними осями шарнірів. Відому машину можна використовувати для копання зворотною лопатою, навантажувально-розвантажувальних робіт з сипкими матеріалами, здійснюючи затискач матеріалу щелепою і ковшом, як грейфером. Наявність двох шарнірної вставки дозволяє здійснювати маніпулювання захопленими предметами. Недоліком відомої машини є низька продуктивність при роботі грейфером за рахунок неповного використовування об'єму ковша і переміщення, в слідстві цього малого об'єму грунту в одиницю часу, а також обмежені можливості маніпулювання захопленими предметами. Найближчим до пропонованого по технічній суті і результату, що досягається, є пристрій для виконання земляних і навантажувально-розвантажувальних робіт, включаюче встановлену на самохідному шасі поворотну платформу, стрілу і дві рукояті з робочими органами, поворотні навколо подовжньої осі і в площині проходячої через їх подовжні осі. Даний пристрій можна використовувати для проведення різних видів робіт: копання прямою або зворотною лопатою, роботи в режимі грейфера, затискач і маніпулювання окремими предметами і т.д., не витрачаючи часу на монтажні і демонтажні роботи. Недоліком пристрою є те, що при використовуванні його як грейфер або затискач останні жорстко орієнтовані в площині, перпендикулярній площині підйому стріли. Внаслідок цього обробка траншей можлива тільки по осі руху базової машини і неможливе орієнтування в просторі об'єктів маніпулювання. Мета винаходу – розширення технічних можливостей маніпулятора будівельних машин. Поставлена мета досягається тим, що пристрій для виконання - земляних і навантажувально-розвантажувальних робіт, включаюче встановлену на самохідному шасі поворотну платформу, стрілу і дві рукояті з робочими органами, поворотні навколо подовжньої осі і в площині, що проходить через їх подовжні осі, забезпечено проміжною ланкою, шарнірно пов'язаною із стрілою з можливістю повороту в площині підйому стріли, а рукояті встановлені на проміжній ланці з можливістю обертання навколо його подовжньої осі і поворотно-поступального переміщення уздовж його подовжньої осі.
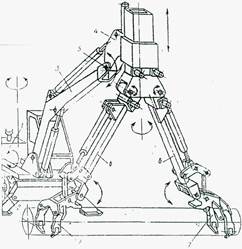
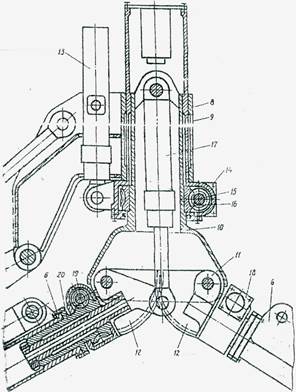
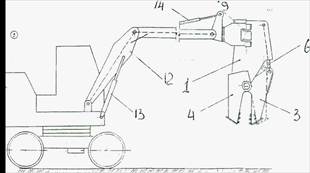
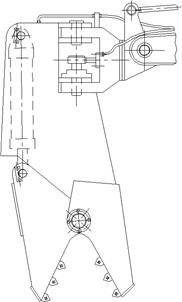
Крім того, проміжна ланка виконана у вигляді кожуха зі встановленим в·нем з можливістю поворотно-поступального переміщення уздовж його подовжньої осі порожнистим елементом, і корпуси механізму повороту рукоятей в площині, що проходить через їх подовжні осі, встановленого з можливістю обертання усередині порожнистого елементу, причому механізм повороту рукоятей в площині, що проходить через їх подовжні осі, виконаний у вигляді зубчатой· передачі, ланки якої виконані у вигляді зубчатих секторів, в яких встановлені рукояті, і приводу. Механізм обертання рукоятей навколо подовжньої осі проміжної ланки виконаний у вигляді гідромотора, встановленого на порожнистому елементі, і черв'ячної передачі, черв'ячне колесо якої встановлене на корпусі механізму повороту рукоятей в ·площини, що проходить через їх подовжні осі. Привід повороту рукоятей в площині, що проходить через їх подовжні осі, виконаний у вигляді гідроциліндра, шток якого шарнірно сполучений з одним із зубчатих секторів, а корпус шарнірно укріплений в корпусі механізму повороту рукоятей. Механізм обертання кожної рукояті навколо своєї подовжньої осі виконаний у вигляді гідромотора і черв'ячної передачі, встановлених відповідно на кожному зубчатому секторі механізму повороту рукоятей, а кожна рукоять відповідно встановлена на вихідному валу черв'ячної передачі. Пристрій для виконання земляних і навантажувально-розвантажувальних робіт (Рис.1.11) складається з поворотної платформи 1, змонтованої на самохідному шасі 2, стріли 3, проміжної ланки 4, сполученого із стрілою за допомогою шарніра 5 з можливістю повороту в площині підйому стріли, двох рукоятей 6 і робочих органів 7. Обидві рукояті змонтовані на проміжній ланці 4 з можливістю обертання навколо його подовжньої осі, поворотно-поступального переміщення уздовж неї, повороту в площині, що проходить через подовжні осі рукоятей, і обертання навколо своєї подовжньої осі. Кожен робочий орган 7 виконаний у вигляді затискач і змонтований на кінці рукояті 6 з можливістю повороту в площині повороту рукоятей. Проміжна ланка 4 виконана у вигляді кожухів (Рис.1.12), усередині якого з можливістю поворотно-поступального переміщення уздовж його подовжньої осі встановлений порожнистий елемент 9. Усередині порожнистого елементу 9 з можливістю обертання встановлений корпус 10 механізму 11 повороту рукоятей і площини, що проходить через їх подовжні осі. Механізм 11 повороту рукоятей виконаний у вигляді зубчатих секторів 12, на яких змонтовані рукояті 6. Механізм поворотно-поступального переміщення рукоятей 6 уздовж осі проміжної ланки 4 виконаний у вигляді гідроциліндра 13, шток якого сполучений з порожнистим елементом 9, а корпус закріплений в кожусі 8, проміжної ланки 4. Механізм обертання рукоятей 6 навколо подовжньої осі проміжної ланки 4 виконаний у вигляді гідромотора 14, який змонтований на рухомому елементі 9 проміжної ланки, і черв'ячної передачі 15, черв'ячне колесо 16 якого закріплене на корпусі 10 механізму повороту рукоятей в площині, що проходить через їх подовжні осі.
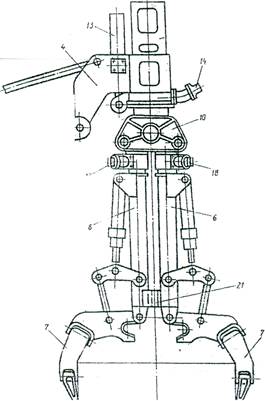
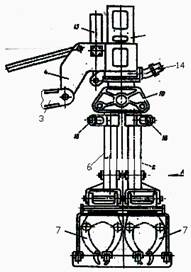
Поворот рукоятей 6 в площині, що проходить через їх подовжні осі, здійснюється за допомогою приводу, виконаного у вигляді гідроциліндра 17, шток якого шарнірно сполучений з одним із зубчатих секторів 12, а корпус закріплений в корпусі 10 механізму 11 повороту рукоятей. Механізм обертання рукоятей 6 навколо своєї подовжньої осі виконаний у вигляді гідромотора 18 і черв'ячної передачі 19, які змонтовані на зубчатому секторі 12 механізму повороту рукоятей, при цьому рукоять 6 змонтована на вихідному валу 20 черв'ячної передачі. Для збільшення жорсткості конструкції на рукоятях 6 закріплені упори 21. Для виконання земляних робіт пристрій оснащений ковшами. За рахунок конструкції маніпулятора при виконанні ним різних робіт рукояті 6 мають нагоду поворотно поступального переміщення уздовж подовжньої осі проміжної ланки 4, обертання навколо неї, повороту в площині, що проходить через подовжні осі рукоятей, і обертання навколо своєї подовжньої осі, що дозволяє шляхом перетворення пристосовувати маніпулятор до властивостей середовища і видів робіт. За допомогою вказаних приводів і наявності на рукоятях 6 універсальних зачепів 7 маніпулятор (Рис.1.13) має нагоду маніпулювати різними об'єктами: переміщати і орієнтувати в просторі будівельні матеріали і конструкції, виконувати навантажувально-розвантажувальні операції з довгомірними вантажами, виробляти стиковку і укладання в траншею дренажних труб і т.д. Крім того, для виконання земляних робіт (Рис.l.l4) за допомогою захоплень 7 пристрій оснащується різним екскаваційним інструментом. До їх числа відносяться один або два ковши різною. місткості і конфігурації. е допомогою механізму обертання рукоятей 6 навколо подовжньої осі проміжної ланки 4 ківш швидко встановлюється прямою або зворотною лопатою. Для отримання устаткування у вигляді грейфера ковши встановлюються за допомогою гідродвигунів 18 І черв'ячної передачі 19 ріжучою кромкою назустріч один одному, при цьому упори 21 взаємодіють один з одним, перешкоджаючи повороту рукоятей площини, що проходить через їх подовжні сили, і забезпечуючи тим самим жорсткість конструкції. Положення ковшів може мінятися в широких межах. Це дозволяє риття траншеї у вертикальній площині, як по осі базової машини, так і у вертикальній площині, зміщеній щодо подовжньої осі базової машини.
1.11. Пристрій для виконання земляних і навантажувально-розвантажувальних робіт в робочому стані загальний вигляд.
1.12. Проміжна ланка, подовжній розріз.
1.13 Пристрій при роботі як затискач.
1.14. Оснащення пристрою інструментом по схемі прямої або зворотної лопати.
Конструктивне виконання пристрою забезпечується в результаті перетворення конструкції без демонтажно-монтажних робіт, пристосування його до властивостей середовища і видів робіт: захопленню і орієнтації в просторі окремих предметів, копанню прямою або зворотною лопатою, роботі в режимі грейфера з риттям траншеї і вертикальної площини як по осі, так і у вертикальній площині, зміщеній щодо подовжньої осі базової машини і т.д. Наявність на рукоятях універсальних захоплень дозволяє працювати різними типами устаткування. Це можуть бути ковши різної місткості, ковші планувальники, механізований інструмент і т.д. Таким чином, технологічні можливості маніпулятора. будівельної машини значно розширені. Аналіз патентних рішень
Проведений патентний огляд показав, що існує велика кількість видів захоплень. Совершенствщшніє їх конструкцій направлено головним чином на розширення технологічних можливостей устаткування, на підвищення продуктивності екскаваторів. Проте аналіз патентів і винаходів показав, що існує ряд недоліків, що обмежують застосування відомих конструкцій: необхідність в складному гідравлічному приводі, застосування дорогого устаткування' (авторське свідоцтво N2 3767070), значні габаритні розміри і трудність роботи в обмежених умовах (авторське свідоцтво N2 1293282), складність виготовлення і ремонту, необхідність в ручному переналагодженні устаткування, значна металоємність (авторське свідоцтво N2 1027338).
Пропоноване удосконалення
Робоче устаткування гідравлічного екскаватора (Рис.1.15.) полягає їх захвата1, що містить корпус 2 з шарнірно приєднаною рухомою щелепою 3 і нерухомою щелепою 4. Щелепа 3 кріпиться за допомогою шарніра 5. Рухома щелепа 3 приводиться в рух за допомогою гідроциліндра б.Поворот затискач 1 здійснюється в діапазоні від Про до 1800 і здійснюється за допомогою гідромотора 7. Повертається затискач щодо нерухомого кріплення 8. Корпус затискач 2 і кріплення 8 сполучені за допомогою пальців 9 і 10. Робоче устаткування гідравлічного екскаватора також включає стрілу 11, базову машину 12, гідроциліндри управління 13 і 14. Запропоноване робоче устаткування (рис.1.16.) дає можливість проводити відновні роботи, навантажувально-розвантажувальні роботи об'ємних вантажів. Робоче устаткування для відновних робіт, що включають базову машину, шарнірно встановлену на ній стрілу, робочий орган з механізмом повороту і кріпленням робочого органу, який шарнірно пов'язаний із стрілою базової машини. Перевага цього устаткування: поворот тільки затискач, платформа на місці - обмежені умови.
1.15 Робоче устаткування гідравлічного екскаватора разом з базовою машиною.
1.16 Загальний вид робочого устаткування.
|
||||||||
|
|
Последнее изменение этой страницы: 2022-09-03; просмотров: 44; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.135.12 (0.007 с.) |