
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Техніко-економічне обгрунтуванняСтр 1 из 13Следующая ⇒
Техніко-економічне обгрунтування
Патентний огляд
Прискорення технічного прогресу і зростання продуктивності праці в будівництві значною мірою залежать від рівня механізації будівельного виробництва. В даний час в Україні ведеться робота по наступних основних напрямах: розробка парку машин, що забезпечують підвищення потужності (за рахунок упровадження нових двигунів і гідрообладнання високого тиску); продуктивності (за рахунок використовування одного робочого органу в десятках необхідних операцій на будівельному майданчику); розвиток виробництва спеціальної техніки, що забезпечує швидкісне будівництво; підвищення технічного рівня і ефективності машин і оснащення їх системами автоматизації управління із застосуванням мікропроцесорної техніки, розробки будівельних маніпуляторів і роботизованих пристроїв, що забезпечують підвищення якості і безпеки робіт, зниження енерговитрат, поліпшення економічних показників і скорочення кількості обслуговуючого персоналу. Сучасне місто вимагає малогабаритної, маневреної, могутньої техніки. Проте нинішній економічний стан України не дозволяє випускати абсолютно нову техніку і робоче устаткування до неї. У зв'язку з цим багато машинобудівних заводів проводять модернізацію існуючих машин. Нижче приведений патентний огляд дозволяє прослідити тенденції розвитку навісного устаткування до екскаваторів і визначити всі його плюси і мінуси.
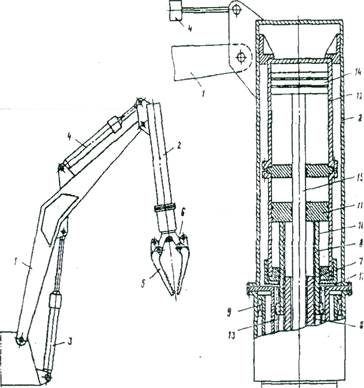
Формула винаходу. Робоче устаткування екскаватора, включаюче шарнірно зчленовані стрілу і рукоять, веделковий затискач з важелями, гідроциліндри управління стрілою і рукояттю, механізм повороту веделкового затискача, розміщений в порожнині рукояті, і гідроциліндр, пов'язаний з веделковим затискачем, відрізняється тим, що, за допомогою підвищення надійності і спрощення конструкції, механізм повороту веделкового затискача виконаний у вигляді двох втулок, розміщених одна в іншій і зв'язаних між собою за допомогою вирізки, при цьому внутрішня втулка жорстко пов'язана з веделковим затискачем, а зовнішня має жорстко пов'язаний з нею поршень, закріплений на штоку гідроциліндра, пов'язаного з важелями веделкового затискачу, і встановлена з можливістю переміщення у вертикальних направляючих, закріплених усередині рукояті, при цьому шток гідроциліндра встановлений співісний з втулками.
Формула винаходу. Робоче устаткування гідравлічного екскаватора по авт. св. № 827695 відрізняється тим, що, з метою розширення його технологічних можливостей, рукоять виконана з основою у вигляді рукояті традиційної конструкції і з фіксовано посадженим на оголовок основи змінним модулем у вигляді порожнистого корпусу, внутрішня поверхня якого еквівалентна зовнішній поверхні оголовка основи, при цьому провушини рукояті для з'єднання з нею двох шарнірної вставки, важіль-тягового двохзвенника і гідроциліндра повороту вставки закріплені на модулі.
Рис. 1.5 Робоче устаткування з двохщелепним ковшом, змонтованим на рукояті.
Формула винаходу. Робоче устаткування гідравлічного екскаватора, включаюче рукоять з шарнірно приєднаним до неї двохщелепним ковшом, гідроциліндри управління робочим устаткуванням, відмінне тим, що з метою підвищення продуктивності при роботі в грейферномуу режимі і забезпечення багатозахватності ковша при роботі з штучними вантажами, передня щелепа ковша виконана з двома додатковими провушинами на кожній бічній стінці і забезпечена фронтальною додатковою щелепою з провушинами і шарнірно приєднаними до неї гідроциліндрами, причому додаткова фронтальна щелепа провушинам до двох симетричним провушинам на протилежних бічних стінках передньої щелепи, а вільні кінці гідроциліндрів додаткової фронтальної щелепи приєднані шарнірно до інших симетричних провушинам передній щелепі.
Формула винаходу Робоче устаткування гідравлічного екскаватора, включаюче рукоять, ківш, що послідовно встановлений з ним на загальному шарнірі і має вікно в задній стеку додатковий вузький ківш, вузол стопоріння, одного з ковшів в неробочому положенні, одним кінцем змонтований на рукояті, і гідроциліндр управління, зв'язаний відмінне тим, що, з метою підвищення його експлуатаційних можливостей, додатковий ківш встановлений перед основним ковшом і пов'язаний з вузлом стопоріння в неробочому положенні, виконаним у вигляді гідроциліндра, закріпленого іншим кінцем на додатковому ковші, а основний ківш сполучений з гідроциліндром управління, при цьому ріжуча кромка додаткового ковша маємо більший радіус копання, ніж ріжуча кромка основного ковша.
Формула винаходу. Робоче устаткування гідравлічного екскаватора, включаюче ківш з передньою і задньою ріжучими щелепами, рукоять, до якої задня щелепа при сполучена шарнірно через закріплені на щелепі кронштейни, гідроциліндри управління щелепами, відмінні тим, що, з метою зниження енергоємності процесу копання екскаватора в грейферному режимі, робоча частина передньої щелепи сполучена з її монтажною щелепою за допомогою шарніра, вісь якого розташована уздовж кромок бічних стінок цієї щелепи з можливістю фіксованого повороту, передня і задня щелепи сполучені за допомогою двоплечових важелів, осі середніх шарнірів яких суміщені з віссю шарніра, що сполучає задню щелепу з рукояттю, одне плече сполучене з монтажною частиною передньої щелепи, а інше – з кронштейнами задньої щелепи з можливістю фіксованого повороту важеля навколо його середнього шарніра.
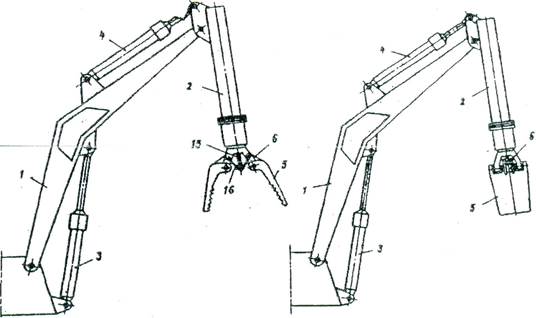
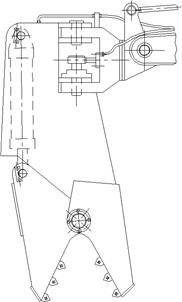
Будівельний маніпулятор Авторське свідоцтво СРСР N2 1293282. Автори: Л.А. Хмара, В.И. Баловнев, А.І. Голубченко і С.В. Шатов. Будівельний маніпулятор (Рис.l l0) включає базову машину 1 з бульдозерним відвалом 2, гідроциліндр управління 3 з відвалом 2. Над базовою машиною 1 встановлена опорна рама 4 із змонтованою на її верхній частині поворотною платформою 5. До поворотної платформи 5 шарнірно приєднана стріла 6, на кінці якої шарнірно змонтована рукоять 7. Стріла 6 і рукоять 7 забезпечені гідроциліндрами управління 8 і 9.
Рис. 1.10 Загальний вигляд будівельного маніпулятора.
На боковій поверхні рукояті 7 виконані подовжні пази 1 Про, в яких встановлений нажимний диск 11, пов'язаний з рукояттю 7 за допомогою силових гідроциліндрів 12. На кінці рукояті 7 виконаний двозахідний гвинт 13, який охоплюється роз'ємним корпусом 14,. Підшипник 15 змонтований на нажимному диску 11 за допомогою стопорного кільця 16. Відхід підйому в гвинтовій лінії двозахідного гвинта 13 має таке значення, що відсутніє самогальмування роз'ємного корпусу при його переміщенні вздовж двозахідного гвинта 13. До нижньої частини роз'ємного корпусу шарнірно підвішений робочий орган, що складається із зовнішнього важеля 17, сполученого з роз'ємним корпусом за допомогою гідроциліндра 18, і внутрішнього важеля 19, пов'язаного із зовнішнім важелем 17 за допомогою гідроциліндра 20. При цьому, нижні робочі частини важеля 17 і 19 виконані у вигляді захоплень 21, що розходяться. Запропонований будівельний маніпулятор дає можливість виконувати роботу по спушенню міцних і мерзлих грунтів. Для цього внутрішній важіль 19 із затискачм і 21 повертається проти годинникової стрілки гідроциліндром 20в верхнє крайнє положення. Далі поворотами стріли 6, рукоятки 7,наружного важеля 17 за допомогою гідроциліндрів 8, 9, 18 здійснюється процес спушення грунту затискачми 21 зовнішнього важеля 17.
Формула винаходу Будівельний маніпулятор, що включає базову машину, шарнірно встановлену на ній стрілу, рукоять, шарнірно пов'язану із стрілою, робочий орган і механізм повороту робочого органу з гвинтовою парою із зовнішнім і внутрішнім елементами і гідроциліндром, пов'язаним з рукояттю, відрізняється тим, що, з метою спрощення конструкції за рахунок використовування стандартних гідроциліндрів, рукоять виконана з подовжніми пазами і має встановлений в них нажимний диск, при цьому механізм повороту має додатковий гидроципіндр, а нажимний диск пов'язаний із зовнішнім елементом гвинтової пари за допомогою підшипників і з рукояттю пов'язаний гідроциліндрами.
Аналіз патентних рішень
Проведений патентний огляд показав, що існує велика кількість видів захоплень. Совершенствщшніє їх конструкцій направлено головним чином на розширення технологічних можливостей устаткування, на підвищення продуктивності екскаваторів. Проте аналіз патентів і винаходів показав, що існує ряд недоліків, що обмежують застосування відомих конструкцій: необхідність в складному гідравлічному приводі, застосування дорогого устаткування' (авторське свідоцтво N2 3767070), значні габаритні розміри і трудність роботи в обмежених умовах (авторське свідоцтво N2 1293282), складність виготовлення і ремонту, необхідність в ручному переналагодженні устаткування, значна металоємність (авторське свідоцтво N2 1027338).
Пропоноване удосконалення
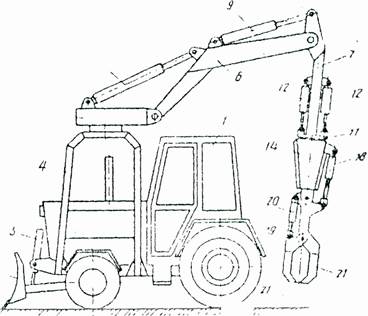
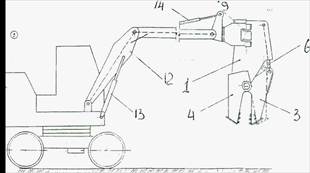
Робоче устаткування гідравлічного екскаватора (Рис.1.15.) полягає їх захвата1, що містить корпус 2 з шарнірно приєднаною рухомою щелепою 3 і нерухомою щелепою 4. Щелепа 3 кріпиться за допомогою шарніра 5. Рухома щелепа 3 приводиться в рух за допомогою гідроциліндра б.Поворот затискач 1 здійснюється в діапазоні від Про до 1800 і здійснюється за допомогою гідромотора 7. Повертається затискач щодо нерухомого кріплення 8. Корпус затискач 2 і кріплення 8 сполучені за допомогою пальців 9 і 10. Робоче устаткування гідравлічного екскаватора також включає стрілу 11, базову машину 12, гідроциліндри управління 13 і 14. Запропоноване робоче устаткування (рис.1.16.) дає можливість проводити відновні роботи, навантажувально-розвантажувальні роботи об'ємних вантажів. Робоче устаткування для відновних робіт, що включають базову машину, шарнірно встановлену на ній стрілу, робочий орган з механізмом повороту і кріпленням робочого органу, який шарнірно пов'язаний із стрілою базової машини.
Перевага цього устаткування: поворот тільки затискач, платформа на місці - обмежені умови.
1.15 Робоче устаткування гідравлічного екскаватора разом з базовою машиною.
1.16 Загальний вид робочого устаткування. Стрілопідйомний механізм
Допустимі значення відстаней до осі шарніра кріплення корпусу гідроциліндра до поворотної платформи.
хц < 0,5∙Допк+(0,1...0,15)=0,5∙1,5+0,1=0,85 м, 1/3 Допк=0,55∙m=0,55∙19,86=1,5 м,
де m – маса екскаватора, т; Допк - діаметр опорний - поворотного круга, м;
де хц, Yц – орієнтовна відстань відповідно від осі опорно-поворотного круга і від рівня стоянки екскаватора до осі провушини корпусу гідроциліндра; hпл - висота платформи, hпл=0,15... 0,25м. Відстань по вертикалі від рівня стоянки екскаватора до осі повороту стріли
Yс= (Нв-Нк) /2+lз+R=(3-5.8) /2+2,75+ 1,3=2,15 м.
Розрахункові параметри, які необхідні для його вибору по нормах, рекомендується визначати по орієнтовних значеннях кута установки β і довжини 1 нерухомої ланки, повного кута повороту φ0 = 90° стріл і довжини плеча ρк зусилля, що розвивається на штоку гідроциліндра. Приймаємо кут β= 40° і визначаємо орієнтовну довжину нерухомої ланки
L= (YС - Yп)/соsβ = (2,65 - 1,137)/cos40° =0,98 м
Розрахунковий хід поршня:
р = 2Lsin(φ0/2)= 20,98sin(90°/2)= 1,385 м
Орієнтуємося на близьке до вертикального напряму (µ=90°) осі гідроциліндра з повністю висунутим штоком, тоді відстань rк від осі повороту стріли до осі гідроциліндра, тобто довжина плеча зусилля на штоку:
Rк= lsin(µ - β)=0,98 sin(90° - 40°)= 0,75 м
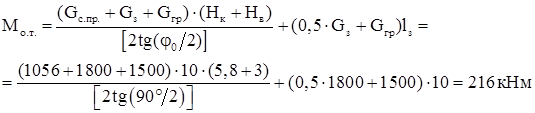
Визначимо момент від сил тяжіння робочого устаткування з вантажем, за умови, що приведена до головки маса стріли mс.пр. =0,4∙2640=1056 кг:
Розрахунковий діаметр гідроциліндра:
По діаметру Др і ходу поршня Sp вибираємо гідроциліндр: J= 125 мм; S= 1400 мм; у=1,65; S=1,845; 5к = 3 245; N= 1,758. При використовуванні в стрілопідйомних механізмах золотникових гідроциліндрів з П = 1,65 і насосів з діапазоном регулювання п = - 1.... 2,5 для обмеження максимальних динамічних навантажень в циліндрі рекомендуються кути тиску: ТН = 70,6°; ТК = 74,6°. По параметрах вибраного гідроциліндра і прийнятим значенням кутів тиску радіус коромисла:
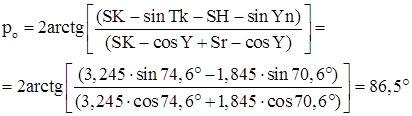
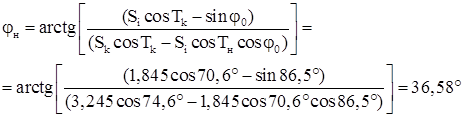
Повний кут повороту відомої ланки (стріли):
Початковий кут відхилення відомої ланки:
Довжина нерухомої ланки:
Для перевірки обчислень по знайдених лінійних параметрах Р, L, φп визначимо розрахункову початкову і кінцеву величини гідроциліндра:
Якщо з точністю вироблених обчислень SLP=Si<SKP=SK, то параметри механізму визначені правильно. Вважаючи уц= 1,4м, знайдемо кут установки нерухомої ланки:
β= arccos[(yc-yц) /L]=аrссоs[(2,15 - 1,4)/1,029]= 43,21°
Приймаємо Хс=Хц=0,85 м, обчислюємо відстань від осі опорно-поворотного пристрою до осі п'яти стріли:
Хс=Хц-L∙sinβ= 0,85-1,029∙sin43°21”= 0,145 м
Теоретичну довжину стріли знаходимо як відстань між головкою і її п'ятою, суміщеною з крапкою:
Рис.3.1 До розрахунку зусиль в робочому устаткуванні.
Механізм повороту затискач
Механізм повороту затискач розраховується для фіксованого нижнього положення гранично опущеної стріли. Повний кут повороту рукояти повинен складати φ= 110°…130°, приймаємо φ = 130°. Кут φy відхилення осі рукояті від теоретичної осі стріли при втягнутому штоку гідроциліндра вибираємо в межах: φу=20°... 30°, приймаємо φу= 25°. Орієнтовну довжину
Розрахунковий хід поршня:
Sp= 2∙
Відстань
Момент опору повороту рукояті:
Мот=Gзг(Iз+0,5R)+Gз∙0,35∙Із=(1800+1500)∙10∙(2,7+0,5∙1,3)+1800∙10∙0,35∙2,7= 127560 Нм.
Розрахунковий діаметр поршня знаходимо при z= 1:
По діаметру Др і ходу Sp поршня вибираємо гідроциліндр Д= 125мм, d= 60мм, S= 1250мм, So= 0,435м, SH= 1,685м, So= 2,935(Ψ= 1,65). Виходячи із забезпечення рівності кутів тиску і довжин плечей зусилля для крайніх положень штока визначаємо параметри механізму приводу затискач при γн= γк= 0,5;
φ0= 0,5∙130°= 65°; ρ=
Довжини плечей зусиль, що розвиваються гідроциліндром в крайніх положеннях штока:
rн= ρІsinφн/Sн=0,67∙2,32∙sin17,8°/1,685= 0,282 м; rк= ρІsin(φн+φ0)/Sк=0,63∙2,32∙sin(17,8°+130°)/2,935= 0,282 м
Оскільки параметри механізму були визначені з умови rH=rK, розрахунок виконаний правильно. Рушійний момент від гідроциліндра в крайніх положеннях при Номінальному тиску Р н в поршневій порожнині гідроциліндра:
Кут β відхилення осі нерухомої ланки від теоретичної осі стріли повинен бути не менше кута між осями теоретичної осі стріли і її верхньої частини. При λ= 10°:
В= 25° - φ0 + λ= 25° - 17,8° + 10° = 17,2°,[3]
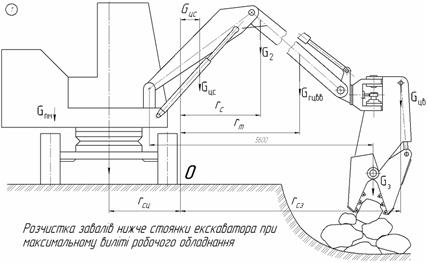
Охорона праці Небезпека перекидання Стійкість екскаватора перевіряється по трьох розрахункових схемах. а) Перше розрахункове положення (pиc.5.1). Екскаватор знаходиться на горизонтальному майданчику, платформа упоперек ходової рами, стріла, на повному вильоті виробляється затискач вантажу. Момент сил, що утримують екскаватор від перекидання, щодо т.О:
Муд= Gnnrnn.+Gхч.rхч,
де Gnn. - вага поворотної платформи з механізмами; Gхч. - вага ходової частини;
Муд.= 70720∙2,75+61750∙1,6= 293280 Нм.
5.1. Розрахунок стійкості при захопленні вантажу.
Момент перекидаючий:
Мопр= Gcrc.+Gисrис+Gизвrизв+ Gзrз+Gцзrцз;
де Gc - вага стріли; Gис - вага циліндра стріли; Gизв - вага циліндра затискач; Gз - вага затискач; Gцз - вага циліндра зіву.
Мопр=17900∙1,5+1180∙2∙9,15+1180∙4,25+18000∙5,5+3900∙6,5=156569 Нм.
Коефіцієнт стійкості:
К = Муд/Мопр=293280/156569=1,87.
К>1, екскаватор в цьому положенні стійкий. б) Друге розрахункове положення (рис 6.2.). Відповідає повороту на вивантаження, платформа упоперек рами, затискач на вильоті найбільшого радіусу. Момент утримуючих сил:
Муд=Gппrпп+Gхчrхч=70720∙2,75+61750∙1,6=293280 Нм;
Момент перекидаючий:
Мопр=Gcrc+Gисrис+Gизвrизв+Gзrз+Gизrиз+Gгrг,
де Gг – вага вантажу, що піднімається;
Мопр=17900∙1,5+1180∙2∙0,15+1180∙4,25+18000∙6,85+3900∙6,15+15000∙7,25=262254 Нм. Коефіцієнт стійкості:
К=Муд/Мопр=293280/262254=1,118
К>1, тобто екскаватор стійкий.
Рис.5.2. Розрахунок стійкості при повороті на вивантаження.
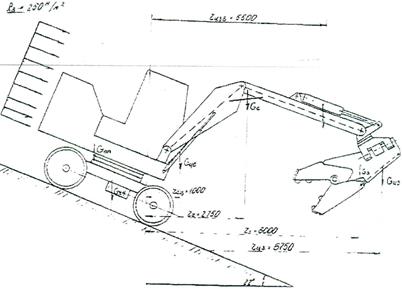
в) Третє розрахункове положення (рис.5.3.). Відповідає руху екскаватора під уклон (α= 22°), стріла піднята до межі, затискач підвернуте під стрілу, тиск вітру у бік ухилу Рв=250 Н/м2. Момент утримуючий:
Муд=Gппrпп+Gхчrхч=70720∙1,75+617501=195510 Нм.
Момент перекидаючий:
Мопр=Gисrис+Gcrc+Gизвrизв+Gзrз+Gизrиз+Мв,
де Мв – момент від сил вітру. Мв = РвFg, де F=7,975 м2 - площа підвітряна; g=1,9 м - висота додатку сили вітру.
Мв=250∙7,975∙1,9=3788 Нм Мопр=1180∙2∙1+17900∙2,75+1180∙5,5+18000∙6+3900∙6,75+3788=182188 Нм.
Коефіцієнт стійкості:
К=Муд/Мопр=195510/182188= 1,07
К>1, значит екскаватор устойчив. [3]
Рис.5.3 Розрахунок стійкості при пересуванні.
Підвищений рівень шуму У тих випадках, коли джерело шуму не може бути усунений, ослаблений або захищений звукоізоляційною перешкодою, для боротьби з шумом використовують засоби звукопоглинання. Звукопоглинання дає найбільшу ефективність в зоні відображеного звуку. Зменшення рівня звуку за рахунок звукопоглинання збільшується із зменшенням об'єму приміщень. Звукопоглинальні облицьовування розміщують на стелі і на верхніх частинах стін. Максимальне звукопоглинання досягається при облицьовуванні не менше 60% загальної площі захищаючих поверхонь приміщень. Розрахуємо звукопоглинальне облицьовування кабіни машиніста. Визначимо ефективність її застосування і рівня звукового тиску на робочому місці після акустичної обробки кабіни. Розміри кабіни 1,5х1,8х1,5 м; об'єм кабіни V= 4,05 м3; площі захищаючих поверхонь, м підлоги - 2,7 м, стін - 2 м, стелі - 2,7 м, загальна площа S = 7,4 м. Розрахункова точка видалення від двигуна r = 3м.
де n= 1 - кількість джерел звуку (двигун); В8000 - постійна приміщення на частоті 8000Гц.
В8000=B1000 µ8000=6V/ 20=6∙4,05/20= 1/22
Розрахункова крапка знаходиться в зоні віддзеркалення, тобто r> rпр [11] Аналіз спектру рівня звукового тиску на робочому місці показав, що вживаний матеріал повинен мати високий коефіцієнт звукопоглинання. Вибираємо для звукопоглинання плити «Вініпор» напівжорсткі (ТУ В-бб-70).
Вібрація Буває два види захисту від вібрації: пасивна і активна віброізоляція. Пасивна віброізоляція (віброзахист) - це віброізоляція, не використовуюча енергію додаткового джерела. Розглянемо для прикладу віброїзоляцію сидіння водія. Сидіння в самохідних будівельне - дорожніх машинах, автомобілях і тракторах повинні забезпечувати санітарно - гігієнічні умови для тривалої - роботи водіїв. Сидіння повинне пом'якшувати поштовхи і удари і частину вібрації, перевищуючу гігієнічні характеристики і норми вібрації по ГОСТ 2.1.1012-78*. Типова схема підресорювання сидіння водія (рис.5.2) складається з наступних елементів: направляючого механізму 1, корпусу водія, що складається з параллелограмних важелів і забезпечуючого стабільність вертикального положення, при коливанні машини. Направляючий механізм, що сполучає посадочне місце водія з рамою ходової частини ·машини, виконує роль кінематичного і силового зв'язку; пружини 3, знижуючої амплітуду коливань сидіння від коливання машини при пересуванні по нерівностях дорогі; регулювального гвинта 4 для зміни жорсткості пружини залежно від маси тіла водія; гидроамортизатора 2, поглинаючого коливання сидіння при пересуванні машини по нерівностях дорогі. Під активною віброїзоляцією розуміють таку ізоляцію, для якої використовується енергія додаткового джерела. Дослідження показали, що пасивна віброізоляція не дозволяє повністю захистити сидіння від вібрації, а дає можливість понизити тільки до 50%. Більш афектно понизити вібрацію можна методом противовібрації збуджуючи дії протифази, що задається сидінню сидячою системою. В цьому випадку вібраційний захист із зворотним зв'язком і додатковою енергією, що підводиться, називається активним віброізоляцією. Цей метод для самохідних машин знаходиться у стадії пошуку, має на меті понизити рівень коливань до заданих санітарних норм. Активна віброізоляція, як правило, заснована на замкнутій системі автоматичного управління. Подібна система підресорювання сидіння показана на рис.5.3. Сидіння водія 1 під впливом коливання його підстави переміщається на величину х. Це переміщення за допомогою акселерометра 2 перетвориться в прискорення х. Поступаючий від акселерометра сигнал за допомогою золотника 3 фіксує зсув акселерометра щодо сидіння, а гідронасос 4 і гідроциліндр 5 впливають на сидінні, притягаючи або відштовхуючи його від підстави. При активній віброізоляції сидіння енергії витрачається 5... 6 кВт.
Освітленість Штучне електричне освітлення будівельних майданчиків і місць виробництва будівельних і монтажних робіт передбачається у тому випадку, коли недосить природного світла, або для освітлення в той годинник діб, коли природне світло відсутнє. По конструктивному виконанню штучне освітлення може бути двох видів: загальне і комбіноване, коли до загального освітлення додається місцеве, що концентрує світловий потік безпосередньо на робочих місцях. Загальне освітлення підрозділяється на загальне рівномірне освітлення (коли весь будівельний майданчик або приміщення освітлюється однотипними світильниками, рівномірно розташованими над поверхнею освітлюваного простору і забезпеченими лампами однакової потужності) і загальне локалізоване освітлення (при розподілі світлового потоку з урахуванням розташування робочих місць). Застосування одного місцевого освітлення на будівельному майданчику і усередині виробничого приміщення не допускається. Вибір системи освітлення залежить від вимог технологічного процесу, розмірів об'єктів розрізнення і характеру зорових робіт. Для будівельних майданчиків і ділянок робіт необхідно передбачати загальне рівномірне освітлення. При цьому освітленість повинна бути не менше 2 лк незалежно від вживаних джерел світла. Для ділянок робіт, де нормовані рівні освітленості повинні бути більше 2 лк, на додаток до загального рівномірного освітлення слід передбачати загальне локалізоване, яке виконують освітлювальними приладами, встановлюваними на будівлях, конструкціях і щоглах загального рівномірного освітлення (рис.5.4). Загальне локалізоване освітлення створюється освітлювальними приладами – фарами, прожекторами або світильниками, встановлюваними на машинах і механізмах. По функціональному призначенню електричне освітлення будівельних майданчиків і ділянок підрозділяється на робоче, аварійне, евакуаційне і спеціальне.
5.4 Інверторная прожекторна щогла Спроектуємо загальне рівномірне освітлення для будівельного майданчика, що має розміри 200х150. Відповідно до ГОСТ 12.1.046-85. Ен=2 лк.; к=1,7. Беремо прожектор ПЗС-45 з лампою ДРЛ-700, Imax= 30000; βΒ= 2; β1= 100; Рл= 700
Тоді N= m∙Ен∙А/Рл = 0,13•1,7•2•30000/700 = 18,9 шт.
А - освітлювальний майданчик, м2 А= 30000. Приймаємо число прожекторів N= 20 шт. Максимальна висота установки прожекторів:
Нmin=
Число прожекторів на одній щоглі приймаємо 5 шт. Кут нахилу рівний Θ=15°. Кожну прожекторну щоглу встановлюємо посередині сторін майданчика.[ll] Протипожежна безпека У звичних умовах горіння є процесом окислення або з'єднання гарячої речовини і кисню повітря. Проте відомо, що деякі речовини, наприклад стислий ацетилен, хлористий азот, вибухові речовини можуть горіти, вибухати без кисню з результатом не тільки реакції з'єднання, але розкладання. Горінням називають швидко протікаючу хімічну реакцію, що супроводжується виділенням великої кількості тепла і звично свіченням. Залежно від швидкості процесу горіння може відбуватися у формі власне горіння, вибуху і детонації. Найбільша швидкість горіння спостерігається в чистому кисні, якнайменша – при змісті в повітрі 14-15% (про.) кисню. При подальшому зменшенні змісту кисню горіння більшої частини речовин - припиняється. Воно відбувається тим швидше, чим більше питома поверхня речовин; при ретельному зсуві горючої речовини і кисню (окислювача) збільшується швидкість горіння. Всяку пожежу найлегше ліквідовувати в його початковій стадії, вживши заходи до локалізації вогнища, щоб не допускати збільшення площі горіння. Успіх швидкої локалізації і ліквідації пожежі в його початковій стадії залежить від наявних відповідних вогнегасних засобів, уміння користуватися ними всіма працюючими, а також від засобів пожежного зв'язку і сигналізації для виклику пожежної допомоги і приведення в дію автоматичних і ручних вогнегасних засобів. Огнетушащие властивості води. Вода в порівнянні з іншими вогнегасними речовинами має найбільшу теплоємність і придатна для гасіння більшості горючих речовин: 1л води при нагріванні від 0 до 100 °З поглинає 419 кДж теплоти, а при випаровуванні - 2260 кДж. Вода володіє достатньою термічною стійкістю (понад 17000 З), що перевищує стійкість багатьох інших вогнегасних речовин. Крім того, вода володіє трьома властивостями вогнетушіння: охолоджує зону горіння або речовини, що горять, розбавляє реагуючі речовини в зоні горіння і ізолює гарячі речовини від зони горіння. Огнетушащие піни. Для гасіння легкозаймистих рідин застосовують піну - суміш газу з рідиною. Піна є системою, в якій дисперсною фазою завжди є газ. Міхури газу можуть утворюватися усередині рідини в результаті хімічних процесів або механічного зсуву газу (повітря з рідиною). Чим менше розміри міхурів газу і поверхнева напруга плівки рідини, тим більше стійка піна (менша можливість руйнування плівки). При невеликій густині (0.1-0.2 г/см) піна розтікається по поверхні горючої рідини, ізолює її від полум'я, і надходження пари в зону горіння припиняється; одночасно охолоджується поверхня рідини. Вибір базового варіанту Вибираємо базову техніку Е0-4321 з робочим устаткуванням гідромолот, для порівняння з новою технікою.
Опис програми «Ефект-М» Висновки
В результаті дипломного проекту був розроблений робочий орган затискач для гідравлічного екскаватора Э0-4321, на підставі чого можна зробити ряд висновків. В даний час відносне мало робітників органів для гідравлічних екскаваторів, які дозволяють виробляти роботи в обмежених умовах, тобто виконувати поставлену задачу без повороту поворотної платформи, а тільки за допомогою робочого органу. Достатня простота конструкції забезпечує розширення можливостей екскаватора. Затискач дозволяє виконувати наступні операції: Розчищання завалів, як на рівні стоянки екскаватора, так і нижче за рівень; Руйнування бетонних і цегляних стін будівель з подальшим вантаженням частин в транспортний засіб; Маніпулювання вантажем. При достатньо широкій номенклатурі виконуваних робіт і частої їх повторюваності, коли потрібне швидке переналагодження робочого устаткування з одного функціонального типу в іншій. Тобто адаптація до різних видів робіт і властивостей середовища, екскаватори, оснащення робочим органом затискач, володіють істотними перевагами в порівнянні з устаткуванням традиційного типу. У дипломному проекті виконані розрахунки: металоконструкцій робочого органу; гідроприводу; річного економічного ефекту; охорона праці. Застосування робочого органу затискач на екскаватор ЕО-4321, для виконання різних видів робіт дає можливість підвищити продуктивність екскаватора з 12563,2 м/рік і дало річний економічний ефект в розмірі: 66840,7 гривень. Техніко-економічне обгрунтування
Патентний огляд
Прискорення технічного прогресу і зростання продуктивності праці в будівництві значною мірою залежать від рівня механізації будівельного виробництва. В даний час в Україні ведеться робота по наступних основних напрямах: розробка парку машин, що забезпечують підвищення потужності (за рахунок упровадження нових двигунів і гідрообладнання високого тиску); продуктивності (за рахунок використовування одного робочого органу в десятках необхідних операцій на будівельному майданчику); розвиток виробництва спеціальної техніки, що забезпечує швидкісне будівництво; підвищення технічного рівня і ефективності машин і оснащення їх системами автоматизації управління із застосуванням мікропроцесорної техніки, розробки будівельних маніпуляторів і роботизованих пристроїв, що забезпечують підвищення якості і безпеки робіт, зниження енерговитрат, поліпшення економічних показників і скорочення кількості обслуговуючого персоналу. Сучасне місто вимагає малогабаритної, маневреної, могутньої техніки. Проте нинішній економічний стан України не дозволяє випускати абсолютно нову техніку і робоче устаткування до неї. У зв'язку з цим багато машинобудівних заводів проводять модернізацію існуючих машин. Нижче приведений патентний огляд дозволяє прослідити тенденції розвитку навісного устаткування до екскаваторів і визначити всі його плюси і мінуси.
|
|||||||||||||
|
|
Последнее изменение этой страницы: 2022-09-03; просмотров: 34; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.149.251.154 (0.181 с.) |








 радіусу коромисла визначаємо по формулі:
радіусу коромисла визначаємо по формулі: від осі повороту рукояті до осі гідроциліндра:
від осі повороту рукояті до осі гідроциліндра:
 = 0,67м;
= 0,67м;



 ,
,




