
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Ответ 10.Закон всемирного тяготения. Сила тяжести. Вес тела. Невесомость.Содержание книги
Поиск на нашем сайте
Ответ 11. Сила упругости. Закон Гука Виды деформаций Деформацией называют изменение формы, размеров или объема тела. Деформация может быть вызвана действием на тело приложенных к нему внешних сил. Силы упругости При деформациях твердого тела его частицы (атомы, молекулы, ионы), находящиеся в узлах кристаллической решетки, смещаются из своих положений равновесия. Этому смещению противодействуют силы взаимодействия между частицами твердого тела, удерживающие эти частицы на определенном расстоянии друг от друга. Поэтому при любом виде упругой деформации в теле возникают внутренние силы, препятствующие его деформации.Силы, возникающие в теле при его упругой деформации и направленные против направления смещения частиц тела, вызываемого деформацией, называют силами упругости. Силы упругости действуют в любом сечении деформированного тела, а также в месте его контакта с телом, вызывающим деформации. В случае одностороннего растяжения или сжатия сила упругости направлена вдоль прямой, по которой действует внешняя сила, вызывающая деформацию тела, противоположно направлению этой силы и перпендикулярно поверхности тела. Природа упругих сил электрическая.Мы рассмотрим случай возникновения сил упругости при одностороннем растяжении и сжатии твердого тела. Закон Гука Связь между силой упругости и упругой деформацией тела (при малых деформациях) была экспериментально установлена современником Ньютона английским физиком Гуком. Математическое выражение закона Гука для деформации одностороннего растяжения (сжатия) имеет вид f=-kx, (2.9) где f - сила упругости; х - удлинение (деформация) тела; k - коэффициент пропорциональности, зависящий от размеров и материала тела, называемый жесткостью. Единица жесткости в СИ - ньютон на метр (Н/м). Закон Гука для одностороннего растяжения (сжатия) формулируют так: сила упругости, возникающая при деформации тела, пропорциональна удлинению этого тела.
Растянем пружину так, чтобы ее свободный конец находился в точке D, координата которой х>0: В этой точке пружина действует на тело М упругой силой fх=-kx<0. Сожмем теперь пружину так, чтобы ее свободный конец находился в точке В, координата которой х<0. В этой точке пружина действует на тело М упругой силой fх=-kx>0. Из рисунка видно, что проекция силы упругости пружины на ось Ах всегда имеет знак, противоположный знаку координаты х, так как сила упругости направлена всегда к положению равновесия С. На рис. 20, б изображен график закона Гука. На оси абсцисс откладывают значения удлинения х пружины, а на оси ординат - значения силы упругости. Зависимость fх от х линейная, поэтому график представляет собой прямую, проходящую через начало координат.Рассмотрим еще один опыт.Пусть один конец тонкой стальной проволоки закреплен на кронштейне, а к другому концу подвешен груз, вес которого является внешней растягивающей силой F, действующей на проволоку перпендикулярно ее поперечному сечению (рис. 21).Действие этой силы на проволоку зависит не только от модуля силы F, но и от площади поперечного сечения проволоки S.Под действием приложенной к ней внешней силы проволока деформируется, растягивается. При не слишком большом растяжении эта деформация является упругой. В упруго деформированной проволоке возникает сила упругости fуп. fуп= -F (2.10) Состояние упруго деформированного тела характеризуют величиной s, называемой нормальным механическим напряжением (или, для краткости, просто нормальным напряжением). Нормальное напряжение s равно отношению модуля силы упругости к площади поперечного сечения тела: s=fуп/S (2.11) Пусть первоначальная длина нерастянутой проволоки составляла L0. После приложения силы F проволока растянулась и ее длина стала равной L. Величину DL=L-L0 называют абсолютным удлинением проволоки. Величину e=DL/L0 (2.12) называют относительным удлинением тела. Для деформации растяжения e>0, для деформации сжатия e<0.Наблюдения показывают, что при небольших деформациях нормальное напряжение s пропорционально относительному удлинению e: s=E|e|. (2.13) Формула (2.13) является одним из видов записи закона Гука для одностороннего растяжения (сжатия). В этой формуле относительное удлинение взято по модулю, так как оно может быть и положительным и отрицательным. Коэффициент пропорциональности Е в законе Гука называется модулем продольной упругости (модулем Юнга).Установим физический смысл модуля Юнга. Как видно из формулы (2.12), e=1 и L=2L0 при DL=L0. Из формулы (2.13) следует, что в этом случае s=Е. Следовательно, модуль Юнга численно равен такому нормальному напряжению, которое должно было бы возникнуть в теле при увеличении его длины в 2 раза. (если бы для такой большой деформации выполнялся закон Гука). Из формулы (2.13) видно также, что в СИ модуль Юнга выражают в паскалях (1 Па = 1 Н/м2). Диаграмма растяжения
Ответ 13 Кинетическая энергия Потенциальная энергия
На произвольно выбранном таком участке сила тяжести Fт составляет с перемещением sk угол k. Поэтому на данном участке работа силы тяжести Ak=Fт·sk·cos(k). (3.15) Спроецируем участок sk на вертикаль BD. Его проекция hk=sk·cos(k). (3.16) Из (3.15) и (3.16) имеем Ak=Fт·hk. Очевидно, что работа ABC силы тяжести Fт на всем пути ВС равна сумме элементарных работ hk на всех участках sk этого пути: ABC=Fт(h1-h2)=mgh1-mgh2 (3.17) Из последней формулы видно, что работа силы тяжести при переносе материальной точки массой m в поле тяготения Земли равна разности двух значений некоторой величины mgh. Поскольку работа есть мера изменения энергии, то в правой части формулы (3.17) стоит разность двух значений энергии этого тела. Это значит, что величина mgh представляет собой энергию, обусловленную положением тела в поле тяготения Земли.
Энергию, обусловленную взаимным расположением взаимодействующих между собой тел (или частей одного тела), называют потенциальной и обозначают Wп. Следовательно, для тела, находящегося в поле тяготения Земли, Wп=mgh. (3.18) С учетом (3.18) формулу (3.17) можно записать в виде ABC=Wп1-Wп2=-(Wп2-Wп1)=-Wп (3.19) т. е. работа силы тяжести равна изменению потенциальной энер-гии тела, взятому с противоположным знаком.Из рис. видно, что работа ABD, совершаемая силой тяжести при перемещении материальной точки массой m из точки B в точку D по вертикали ВD, составляет ABC=mgh1-mgh2. Следовательно, ABD=ABC. Таким образом, работа силы тяжести не зависит от траектории движения тела, а определяется лишь положением в поле тяготения Земли начальной и конечной точек перемещения тела.Силы, работа которых не зависит от траектории движения тела, называют консервативными, а поле таких сил называется потенциальным. Сила тяжести является консервативной, а поле тяготения - потенциальным. Из формулы (3.19) следует, что работа консервативных сил равна изменению потенциальной энергии тела, взятому с противоположным знаком. Следует отметить, что тела имеют потенциальную энергии не только вследствие их притяжения к Земле. В результате упругой деформации тело тоже приобретает потенциальную энергию. Если, например, сжимается или растягивается упругая пружина, то ее потенциальная энергия вычисляется по формуле Wп=kх2/2, где k - жесткость пружины, x - ее удлинение, т.е. смещение точки приложения силы упругости. A=Wп1-Wп2= kх12/2- kх22/2=-Wп (3.20) Сумму кинетической и потенциальной энергии тела называют полной механической энергиейэтого тела и обозначают W. W=Wп+Wk (3.21)
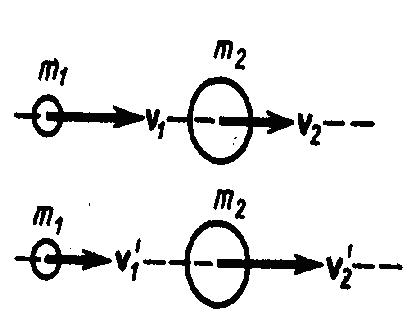
Ответ 16. Рис.1
При указанных допущениях законы сохранения имеют вид
Произведя соответствующие преобразования в выражениях (1) и (2), получим
откуда
Решая уравнения (3) и (5), находим
Разберем несколько примеров. 1. При ν2 =0
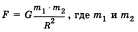
Проанализируем выражения (8) в (9) для двух шаров различных масс: а) m1=m2. Если второй шар до удара висел неподвижно (ν2 =0) (рис. 2), то после удара остановится первый шар (ν1' =0), а второй будет двигаться с той же скоростью и в том же направлении, в котором двигался первый шар до удара (ν2' = ν1);
Рис.2
б) m1>m2. Первый шар продолжает двигаться в том же направлении, как и до удара, но с меньшей скоростью (ν1' < ν1). Скорость второго шара после удара больше, чем скорость первого после удара (ν2' > ν1') (рис. 3);
Рис.3
в) m1<m2. При ударе направление движения первого шара изменяется - шар отскакивает обратно. При этом второй шар движется в сторону, в которую двигался первый шар до удара, но с меньшей скоростью, т. е. ν2' < ν1 (рис. 4);
Рис.4
г) m2>>m1 (например, столкновение шара со стеной). Из уравнений (8) и (9) следует, что ν1' = - ν1; ν2' ≈ 2m1 ν2' /m2. 2. При m1=m2 выражения (6) и (7) будут иметь вид ν1' = ν2; ν2' = ν1; т. е. шары равной массы как бы обмениваются скоростями.
Рис.5
Если массы шаров m1 и m2, их скорости до удара ν1 и ν2, то, используя закон сохранения импульса
где v - скорость движения шаров после удара. Тогда
Используя (10), получаем
Если ударяемое тело было первоначально неподвижно (ν2=0), то
и
Когда m2>>m1 (масса неподвижного тела очень велика), то ν << ν1 и практически вся кинетическая энергия тела переходит при ударе в другие формы энергии. Поэтому, например, для получения значительной деформации наковальня должна быть значительно массивнее молота. Наоборот, при забивании гвоздей в стену масса молота должна быть гораздо большей (m1>>m2), тогда ν≈ν1 и почти вся энергия тратится на возможно большее перемещение гвоздя, а не на остаточную деформацию стены.
ОТВЕТ 20 Ответ 22 Ответ 10.Закон всемирного тяготения. Сила тяжести. Вес тела. Невесомость. Исаак Ньютон выдвинул предположение, что между любыми телами в природе существуют силы взаимного притяжения. Эти силы называют силами гравитации, или силами всемирного тяготения. Сила всемирного тяготения проявляется в Космосе, Солнечной системе и на Земле. Ньютон обобщил законы движения небесных тел и выяснил,
|
||||
|
|
Последнее изменение этой страницы: 2016-04-19; просмотров: 819; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.012 с.) |

 Рассмотрим опыт, иллюстрирующий закон Гука. Пусть ось симметрии цилиндрической пружины совпадает с прямой Ах (рис. 20, а). Один конец пружины закреплен в опоре в точке А, а второй свободен и к нему прикреплено тело М. Когда пружина не деформирована, ее свободный конец находится в точке С. Эту точку примет за начало отсчета координаты х, определяющей положение свободного конца пружины.
Рассмотрим опыт, иллюстрирующий закон Гука. Пусть ось симметрии цилиндрической пружины совпадает с прямой Ах (рис. 20, а). Один конец пружины закреплен в опоре в точке А, а второй свободен и к нему прикреплено тело М. Когда пружина не деформирована, ее свободный конец находится в точке С. Эту точку примет за начало отсчета координаты х, определяющей положение свободного конца пружины. Используя формулу (2.13), по экспериментальным значениям относительного удлиненияe можно вычислить соответствующие им значения нормального напряжения s, возникающего в деформированном теле, и построить график зависимости s от e. Этот график называют диаграммой растяжения. Подобный график для металлического образца изображен на рис. 22. На участке 0-1 график имеет вид прямой, проходящей через начало координат. Это значит, что до определенного значения напряжения деформация является упругой и выполняется закон Гука, т. е. нормальное напряжение пропорционально относительному удлинению. Максимальное значение нормального напряжения sп, при котором еще выполняется закон Гука, называют пределом пропорциональности.При дальнейшем увеличении нагрузки зависимость напряжения от относительного удлинения становится нелинейной (участок 1-2), хотя упругие свойства тела еще сохраняются. Максимальное значение sу нормального напряжения, при котором еще не возникает остаточная деформация, называют пределом упругости. (Предел упругости лишь на сотые доли процента превышает предел пропорциональности.) Увеличение нагрузки выше предела упругости (участок 2-3) приводит к тому, что деформация становится остаточной.Затем образец начинает удлиняться практически при постоянном напряжении (участок 3-4 графика). Это явление называют текучестью материала. Нормальное напряжение sт, при котором остаточная деформация достигает заданного значения, называют пределом текучести.При напряжениях, превышающих предел текучести, упругие свойства тела в известной мере восстанавливаются, и оно вновь начинает сопротивляться деформации (участок 4-5 графика). Максимальное значение нормального напряжения sпр, при превышении которого происходит разрыв образца, называют пределом прочности.
Используя формулу (2.13), по экспериментальным значениям относительного удлиненияe можно вычислить соответствующие им значения нормального напряжения s, возникающего в деформированном теле, и построить график зависимости s от e. Этот график называют диаграммой растяжения. Подобный график для металлического образца изображен на рис. 22. На участке 0-1 график имеет вид прямой, проходящей через начало координат. Это значит, что до определенного значения напряжения деформация является упругой и выполняется закон Гука, т. е. нормальное напряжение пропорционально относительному удлинению. Максимальное значение нормального напряжения sп, при котором еще выполняется закон Гука, называют пределом пропорциональности.При дальнейшем увеличении нагрузки зависимость напряжения от относительного удлинения становится нелинейной (участок 1-2), хотя упругие свойства тела еще сохраняются. Максимальное значение sу нормального напряжения, при котором еще не возникает остаточная деформация, называют пределом упругости. (Предел упругости лишь на сотые доли процента превышает предел пропорциональности.) Увеличение нагрузки выше предела упругости (участок 2-3) приводит к тому, что деформация становится остаточной.Затем образец начинает удлиняться практически при постоянном напряжении (участок 3-4 графика). Это явление называют текучестью материала. Нормальное напряжение sт, при котором остаточная деформация достигает заданного значения, называют пределом текучести.При напряжениях, превышающих предел текучести, упругие свойства тела в известной мере восстанавливаются, и оно вновь начинает сопротивляться деформации (участок 4-5 графика). Максимальное значение нормального напряжения sпр, при превышении которого происходит разрыв образца, называют пределом прочности. Определим работу, совершаемую силой тяжести Fтпри переносе материальной точки массой m по криволинейной траектории ВС из одной точки В поля тяготения Земли в другую точку С (рис 31). Для этого разобьем траекторию движения тела на сколь угодно малые участки sk, каждый из которых можно считать прямолинейным.
Определим работу, совершаемую силой тяжести Fтпри переносе материальной точки массой m по криволинейной траектории ВС из одной точки В поля тяготения Земли в другую точку С (рис 31). Для этого разобьем траекторию движения тела на сколь угодно малые участки sk, каждый из которых можно считать прямолинейным. (1)
(1) (2)
(2) (3)
(3) (4)
(4) (5)
(5) (6)
(6) (7)
(7) (8)
(8)  (9)
(9)



 (15.10)
(15.10) 




 Силы всемирного тяготения действуют между любыми телами в природе, но ощутимыми они становятся при больших массах (или если хотя бы масса одного из тел велика). Закон же всемирного тяготения выполняется только для материальных точек и шаров (в этом случае за расстояние принимается расстояние между центрами шаров).Частным видом силы всемирного тяготения является сила притяжения тел к Земле (или к другой планете). Эту силу называют силой тяжести. Под действием этой силы все тела приобретают ускорение свободного падения. В соответствии со вторым законом Ньютона g = Ft*m следовательно, Ft = mg. Сила тяжести всегда направлена к центру Земли. В зависимости от высоты h над поверхностью Земли и географической широты положения тела ускорение свободного падения приобретает различные значения. На поверхности Земли и в средних широтах ускорение свободного падения равно 9,831 м/с2.В технике и быту широко используется понятие веса тела. Весом тела называют силу, с которой тело давит на опору или подвес в результате гравитационного притяжения к планете (рис. 6). Вес тела обозначается Р. Единица веса — Н. Так как вес равен силе, с которой тело действует на опору, то в соответствии с третьим законом Ньютона по величине вес тела равен силе реакции опоры. Поэтому, чтобы найти вес тела, необходимо определить, чему равна сила реакции опоры.
Силы всемирного тяготения действуют между любыми телами в природе, но ощутимыми они становятся при больших массах (или если хотя бы масса одного из тел велика). Закон же всемирного тяготения выполняется только для материальных точек и шаров (в этом случае за расстояние принимается расстояние между центрами шаров).Частным видом силы всемирного тяготения является сила притяжения тел к Земле (или к другой планете). Эту силу называют силой тяжести. Под действием этой силы все тела приобретают ускорение свободного падения. В соответствии со вторым законом Ньютона g = Ft*m следовательно, Ft = mg. Сила тяжести всегда направлена к центру Земли. В зависимости от высоты h над поверхностью Земли и географической широты положения тела ускорение свободного падения приобретает различные значения. На поверхности Земли и в средних широтах ускорение свободного падения равно 9,831 м/с2.В технике и быту широко используется понятие веса тела. Весом тела называют силу, с которой тело давит на опору или подвес в результате гравитационного притяжения к планете (рис. 6). Вес тела обозначается Р. Единица веса — Н. Так как вес равен силе, с которой тело действует на опору, то в соответствии с третьим законом Ньютона по величине вес тела равен силе реакции опоры. Поэтому, чтобы найти вес тела, необходимо определить, чему равна сила реакции опоры.






