
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Порядок проведення досліду і обробка результатів.Содержание книги Поиск на нашем сайте
Зіставлення дослідних і теоретичних результатів Визначення нормальних напружень у перетині А на ділянці чистого вигину. 1. Підключити вимірник деформації ИДЦ до тензорезисторів, наклеєних на ділянці чистого вигину в перетині А. 2. За допомогою гвинтового пристрою послідовно навантажити балку зусиллям 1 кН, 2 кН і 3 кН, контролюючи величину зусиль по індикатору динамометра за допомогою тарувального графіка. 3. На кожнім рівні навантаження зняти показання з ИДЦ для всіх тензорезисторів ділянки чистого вигину і записати їх у табл. 3.10. 4. По кожному i-му тензорезистору (i = 1, 2, …, 7) обчислити різниці показань Di, обумовлених наступним і попереднім навантаженнями, а також їх середнє значення DIср. 5. Визначити дослідні величини нормальних напружень для всіх точок, яких наклеєні тензорезистори:
де a =10-5 - ціна одиниці дискретності приладу ИДЦ. 6.Занести в табл.3.10 теоретичні значення нормальних напружень, обчислені для точок 1...7…7 перетину А. 7. Зіставити дослідні і теоретичні значення напружень, обчисливши відхилення Ds у %:
Таблиця 9.1
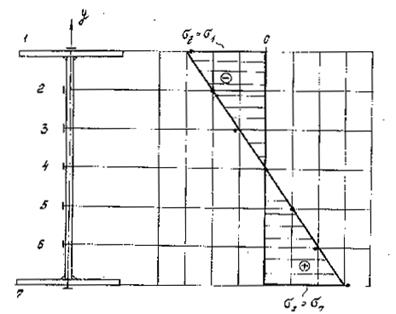
8. Побудувати епюру нормальних напружень, обчислених у перетині А, що, у силу залежності (3.16), має лінійний характер (рис.9.10). Тут же показати точки, що відповідають експериментальним напруженням, і переконатися в їх близькості до теоретичної прямої.
Рис.9.10 Визначення нормальних, дотичних і головних напружень при поперечному вигині перетину Б. 1. Підключити вимірник деформацій ИДЦ до тензорезисторів, наклеєним на ділянці поперечного вигину в перетині Б у напрямку головних напружень
Рис.9.11 2. За допомогою гвинтового пристрою послідовно навантажити балку зусиллям 1 кн, 2 кн, 3 кн, контролюючи величини зусиль по індикатору динамометра за допомогою тарувального графіка. 3. На кожнім рівні навантаження зняти показання з ИДЦ для всіх тензорезисторів на ділянці поперечного вигину і записати їх у табл.9.2. 4. По кожному i-му тензометру (i = 1, 2, …, 6) обчислити різниці показань Di, обумовлених наступним і попереднім навантаженнями, а також їх середні значення Di, ср. 5. Визначити дослідні величини головних напружень для трьох точок 1, 3, 5. Дослідні значення лінійних деформацій у напрямку головних напружень
Далі, за формулами (3.6), варто обчислити і занести значення головних напружень 6. Занести в табл.3.11 теоретичні значення головних напружень s1, s2, s3, обчислені для точок 1, 3, 5 перетину Б. 7. Зіставити дослідні і теоретичні значення напружень, обчисливши відхилення Ds у %.
Таблиця 9.2
Контрольні питання 1.Як розподіляються дотичні і нормальні напруги в перетині по висоті перетину балки? 2. Що називається згинальним моментом і поперечною силою в перетині балки? Чому вони чисельно рівні? 3. Що називається головним моментом інерції перетину? 4. Що називається статичним моментом площі перетину? 5. Який вид опору називають чистим вигином, а який поперечним? Лабораторна робота №10 Дослідження переміщень і напруг у плоскій рамі Ціль роботи – 1. Дослідне визначення переміщення рухомої шарнірної опори статично визначеної рами. 2. Дослідне визначення горизонтальної реакції в опорі один раз статично невизначеної рами, отриманої з визначеної шляхом накладення додаткового горизонтального зв'язку на рухому опору. 3. Визначення і порівняння напружень, що виникають у середньому перетині горизонтальної ділянки (ригеля) статично визначеної і невизначеної рам. 4. Обчислення відповідних теоретичних значень переміщень, реакцій, напружень і зіставлення їх з експериментальними. Загальні відомості Інженерні спорудження, машини і їхні складові частини, під дією зовнішніх сил деформуються. Зовнішні сили при цьому виконують роботу, що трансформується (переходить) у потенційну енергію деформації системи. Французький інженер Клапейрон у середині XIX сторіччя констатував, що робота, зроблена зовнішніми силами, що діють на пружне тверде тіло при його деформуванні, дорівнює накопиченої в цьому тілі потенційної енергії деформації. З використанням поняття енергія деформації були розроблені досить зручні енергетичні методи визначення переміщень у пружних системах при будь-яких навантаженнях. Так, італійський інженер Кастільяно довів, що частинна похідна від потенційної енергії деформування по узагальненій силі дорівнює відповідному переміщенню точки додатку цієї сили по її напрямку. Найбільш загальні формули для визначення переміщень у пружних стрижневих системах були отримані згодом німецьким ученим Мором. Наприклад, для пошуку переміщення Δ (прогину або кута повороту) будь-якого перетину плоскої рами незалежно від того, чи прикладена в цьому перетині відповідна узагальнена сила чи ні, необхідно скласти вираз для згинальних моментів Μизгх(z) від заданого навантаження і m1x(z) від відповідної одиничної узагальненої безрозмірної сили (F=1, або m=1), прикладеної в перетині, де шукають переміщення. Переміщення при чистому вигині тоді можна обчислити по формулі
де п – число ділянок рами довжиною Графоаналітичний метод обчислення інтеграла Мору для визначення пружних переміщень був запропонований у 1925 р. нашим співвітчизником А.Н. Верещагіним. Спосіб Верещагіна складається в перемножуванні епюр внутрішніх силових факторів і використовується для визначення переміщення в тому випадку, якщо одна з епюр (функцій в інтегралі Мору) – лінійна. По цьому способу інтеграл Мора дорівнює добутку площі вантажної епюри (від зовнішнього навантаження) на ординату лінійної епюри від одиничного навантаження, взяту під центром ваги вантажної епюри. Дослідна установка Лабораторна установка, схема якої зображена на рис.3.8, являє собою П-образну раму, вертикальні елементи якої – стійки 1 і горизонтальний ригель 2, мають прямокутний перетин 30х5 мм. Права опора рами D – шарнірно нерухома і накладає два зв'язки на торцевий перетин рами: забороняє вертикальне і горизонтальне переміщення цього перетину, не перешкоджаючи, однак, його поворотові в площині рами. Ліва опора виконана шарнірно-рухомою і забороняє тільки вертикальне переміщення перетину А рами.
Рис.10.1 Накладені в такий спосіб три зв'язки забезпечують кінематичну незмінюваність рами, що у цьому випадку є статично визначеною: опорні реакції і внутрішні силові фактори в її елементах можна визначити, використовуючи тільки рівняння статики. Горизонтальне переміщення лівої опори при навантажені рами вимірюють за допомогою індикатора годинного типу 3, встановленого нерухомо в опорі 4. У лівої опори встановлено також навантажувальне пристосування, що дозволяє створювати горизонтальне зусилля Т на рухому опору і переміщувати її по горизонталі. Цей пристрій складається із стяжки 5 з коромислом 6 і гвинтової пари 8 із двома вантажами. Величина горизонтального зусилля залежить від положення рухомого вантажу Q1, відмічуваного по шкалі нерухомої лінійки 7. Навантаження рами активними силами F здійснюють за допомогою вантажів і шарнірних підвісок, встановлюваних на ригелі. Положення цих підвісок можна змінювати відповідно до поставленої задачі досліду. Якщо після навантаження зовнішніми силами F (ліва рухома опора А при цьому переміститься вліво) встановити рухомий вантаж навантажувального пристосування так, щоб виникаюча горизонтальна сила перемістила рухому опору А рами у вихідне положення (у навантаженому стані), то опора А стає як би шарнірно нерухомою з горизонтальною реакцією Т, а рама перетворюється в один раз статично невизначену, тому що накладений горизонтальний зв'язок є зайвим з погляду кінематичної незмінюваності всієї рами. Для визначення деформації верхніх і нижніх волокон ригеля на них наклеєні тензодатчики опору (тензорезистори) 9 (рис.10.1) і встановлене роз’єм для підключення датчиків до цифрового вимірника деформацій (ИДЦ) з ціною одиниці дискретності α = 10-5.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2016-04-18; просмотров: 177; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 13.58.77.244 (0.011 с.) |

 ,
,
 .
.
 і
і  . Напружений стан у точках 1, 3, 5 наведено на рис.9.11.
. Напружений стан у точках 1, 3, 5 наведено на рис.9.11.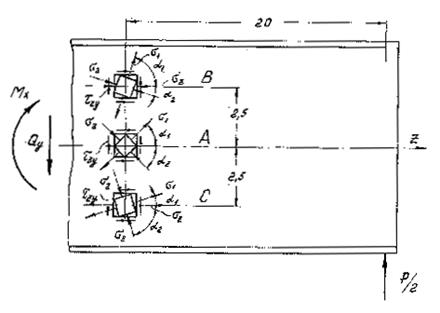
 .
.
 у табл.3.11. Відзначимо, що значення
у табл.3.11. Відзначимо, що значення  визначають датчики 1 і 2,
визначають датчики 1 і 2,  - 3 і 4,
- 3 і 4,  - 5 і 6.
- 5 і 6. ,
,
 .
.



