
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Исследование развития новых систем жат на перегонах
Большинство систем ЖАТ, эксплуатируемых на железных дорогах, включает в себя устройства, выполненные на релейной элементной базе. Современное состояние железнодорожной автоматики и телемеханики характеризуется процессом интенсивного создания и внедрения устройств, реализованных с использованием самых последних достижений микроэлектроники, микропроцессорной техники, теории передачи и обработки сигналов. Из них автоблокировка с тональными рельсовыми цепями имеет высокую надежность, высокий коэффициент возврата путевого приемника, высокую помехозащищенность и защищенность от влияний тягового тока. В автоблокировке (АБ) с тональными рельсовыми цепями применяют рельсовые цепи без изолирующих стыков. В этих рельсовых цепях в качестве сигнального тока используют ток тональной частоты. Основное преимущество таких рельсовых цепей в отсутствии изолирующих стыков на перегоне, что значительно сокращает время на их обслуживание, обеспечивает лучшие условия для канализации обратного тягового тока. При таких рельсовых цепях значительно сокращается количество дроссель-трансформаторов (ДТ). Также рельсовые цепи тональной частоты в отличие от других типов рельсовых цепей могут устойчиво работать при пониженном сопротивлении балласта. Используют два типа рельсовых цепей ТРЦ-3 и ТРЦ-4 (соответственно тональные рельсовые цепи третьего и четвертого поколения). Рельсовые цепи ТРЦ-3 используют сигнальный ток частотой 420 или 480 Гц и имеют максимальную длину 1000 м. ТРЦ-4 использует ток частотой 5000, 5500, 4500 Гц их длина 100–300 м (обычно 200 м). Поскольку длина блок-участка автоблокировки более 1000 м, то каждый блок-участок контролируется несколькими тональными рельсовыми цепями (обычно четырьмя). У проходных светофоров размещают две ТРЦ-4 имеющие зону шунтирования 15 м, остальная часть блок-участка контролируется одной или двумя ТРЦ-3 имеющими зону шунтирования 150 м. Вся аппаратура тональных рельсовых цепей размещается в релейных шкафах сигнальных точек, в местах подключения аппаратуры располагают лишь согласующие элементы (трансформаторы) и элементы защиты (разрядники).
Рисунок 2.1. Рельсовые цепи тональной частоты. Функциональная универсальность устройств ЭССО иллюстрируется обобщенной структурной схемой контроля участка пути Lуч. (рис. 2.2), которая может быть применена в различных устройствахСЖАТ – ПАБ, АБ, ЭЦ, ГАЦ и др. Для этих устройств длина участка пути, показанного на схеме, будет соответствовать:
где Функциональным назначением входного и выходного рельсовых датчиков РДвх. и РДвых. является преобразование наличия или отсутствия в зоне их действия металлической массы GКП колесной пары в импульсный электрический сигнал:
В большинстве случаев преобразующие функции
Рисунок 2.2. Обобщенная структурная схема контроля участка пути
Напольные электронные модули (НЭМ) выполняют преобразование аналоговых импульсных сигналов
В необходимых случаях выходным сигналом НЭМ может служить информация о скорости проследования поезда по тому или иному РД, что показано на схеме информационными выходами Vвх или Vвых. Для компенсации неоднозначности преобразующих функций Функционально-структурный узел НЭМ конструктивно и пространственно может быть реализован по-разному. Это определяется видом перегонных устройств ЭССО. Однако его входные и выходные информационные параметры идентичны для любого вида НЭМ.
С точки зрения информационных параметров, это же относится и к постовым устройствам (ПУ) ЭССО, которые конструктивно и пространственно, как будет показано далее, могут быть различными, а термин «постовые» носит условный характер, так как они могут располагаться в релейных шкафах на перегоне.
Рисунок 2.3. Обобщенная структурная схема ПАБ
Информация импульсов
Сигнал РСЦБ, поступающий на вход исполнительной аппаратуры СЖАТ, должен соответствовать требованиям безопасности. Это определяет необходимость его реализации в виде динамического сигнала, где величина РСЦБ = 1 означает наличие соответствующей последовательности импульсов, а РСЦБ = 0 – ее отсутствие. Если ЭССО используется в устройствах ПАБ, то постовые устройства должны быть разделены на две части, разнесенные по двум соседним станциям (приема и отправления), что показано на схеме рис. 2.3 (ПУотпр и ПУпр). Их выходные сигналы При использовании устройств ЭССО в схемах автоблокировки возможны, в отличие от ПАБ, несколько вариантов реализации обмена информацией между станциями и сигнальными точками (светофорами). Это иллюстрируется на примере структурных схем перегонов оборудования АБ (рис. 2.4, а, б).
Рисунок 2.4. Варианты реализации информационных и управляющих каналов между сигнальными точками АБ
Сравнение структурных схем рис. 2.2 и 2.3, а показывает, что принципиально они идентичны, так как перегон между станциями схемы ПАБ (рис. 2.3) функционально соответствует одному блок-участку АБ схемы рис. 2.4, а. Одновременно с этим структурное построение схемы рис. 2.4, а аналогично стандартным схемам существующих систем АБ с рельсовыми цепями, например, числовой кодовой автоблокировке, где зависимости показаний перегонных светофоров определяются результатом обмена информацией между соседними сигнальными точками, а не усложненной передачей ее на станции приема или отправления. Вторая система построения автоблокировки с использованием ЭССО приведена на структурной схеме рис. 2.4, б. Здесь принят централизованный принцип обмена информацией между сигнальными точками через станцию отправления. Эти варианты структурных схем реализации АБ имеют свои специфические особенности, преимущества и недостатки, которые заключаются в следующем. Недостатком варианта АБ (рис. 2.4, а) является наличие на каж дой сигнальной точке перегона довольно сложной аппаратуры ПУi. Это увеличивает эксплуатационные расходы и обусловливает значительное время на устранение отказов аппаратуры, вызывая увеличенные задержки поездов. в значительной степени это скажется при наличии на участке дороги длинных перегонов с большим числом сигнальных точек.
В схеме АБ (рис. 2.4, б) аппаратура ПУi перенесена на станцию отправления, что улучшает условия ее эксплуатации и устраняет отмеченные недостатки схемы, приведенной на рис. 2.4, а. Совмещение в одном ПУ станции отправления с функциями перегонных устройств ПУi позволяет упростить и удешевить аппаратуру постовых устройств ЭССО. Положительное свойство рассматриваемого варианта (рис. 2.4, б) заключается в том, что на станциях будет иметься информация о занятости или свободности всех блок-участков перегона. Причем наличие этой информации обеспечивается без введения дополнительной контрольной аппаратуры. Однако обрыв информационных связей, например, в середине перегона приводит к отказу всех сигнальных точек перегона. в этом случае повышение живучести АБ схемы (рис. 2.4, б) может быть достигнуто введением кольцевого (двухстороннего) обмена информацией. Использование устройств ЭССО определяет возможность существенного улучшения эксплуатационных показателей автоматической переездной сигнализации (АПС). Это выражается в сокращении времени простоя автомобильного транспорта перед закрытым переездом. Исследования в этой области, а также разработка и внедрение практической аппаратуры уменьшат время закрытого состояния переезда. Другим способом удешевления внедрения микропроцессорных систем ЭЦ является интеграция в архитектуру аппаратно-программного комплекса МПЦ устройств автоблокировки на прилегающих перегонах при комплексной реконструкции целых участков. Аналогично в составе МПЦ должна выполняться и интеграция функций увязки с системой маневровой автоматической локомотивной сигнализации МАЛС и системой автоматического управления торможением САУТ – ЦМ/НСП. Приоритетными направлениями внедрения систем интервального регулирования движением поездов следует признать дальнейшее внедрение систем автоблокировки с тональными рельсовыми цепями и централизованным размещением оборудования. Безусловно, как и в случае с системами телеуправления стрелками и светофорами на станциях, вновь внедряемые системы интервального регулирования движения поездов должны быть микропроцессорными – либо интегрированными в МПЦ, либо в самостоятельном конструктивном исполнении типа АБТЦ-МШ. В целях снижения стоимости – приоритетное внедрение должны получить системы, в которых отсутствуют проходные светофоры, а управление движением поездов осуществляется посредством автоматической локомотивной сигнализации (АЛСО). С точки зрения реализации необходимой пропускной способности в зависимости от категории и специализации линий должна обоснованно применяться трехзначная сигнализация, четырехзначная сигнализация либо система с «подвижными» блок-участками. Выбор того или иного варианта должен производиться по критерию наименьшей стоимости жизненного цикла на расчетный период эксплуатации.
В необходимых случаях применяемая в соответствии с требованиями в станционных системах телеуправления стрелками и светофорами и в системах интервального регулирования движения поездов автоматическая локомотивная сигнализация (АЛС) должна дополняться многозначной автоматической локомотивной сигнализацией АЛС-ЕН и сигналами радиоблокировки, передаваемыми на локомотив от радио-блок-центра (РБЦ или RBC) по цифровому радиоканалу соответствующего стандарта. Что касается традиционной системы АЛС, которая широко распространена на железных дорогах АО «НК «ҚТЖ» и является одной из важнейших систем обеспечения безопасности движения поездов на станциях и перегонах, то значительно повысить устойчивость работы этой системы позволит поэтапный переход на частоту кодирования 75 Гц, прежде всего – на участках с электротягой переменного тока и станциях стыкования родов тока. В дальнейшем частота 75 Гц может стать унифицированной для работы устройств АЛС при всех видах тяги, как электрической, так и автономной.
|
||||||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 159; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.118.126.11 (0.013 с.) |

 , (2.1)
, (2.1) – длина перегона при ПАБ;
– длина перегона при ПАБ;  – длина блок-участка при автоблокировке;
– длина блок-участка при автоблокировке;  – длина стрелочной секции или бесстрелочного участка пути на станции при электрической централизации.
– длина стрелочной секции или бесстрелочного участка пути на станции при электрической централизации. (2.2)
(2.2) и
и  не равны между собой из-за технологического разброса параметров РД и вследствие различных магнитных и электрических характеристик датчиков, что определяется конструктивным расположением РД относительно рельса.
не равны между собой из-за технологического разброса параметров РД и вследствие различных магнитных и электрических характеристик датчиков, что определяется конструктивным расположением РД относительно рельса.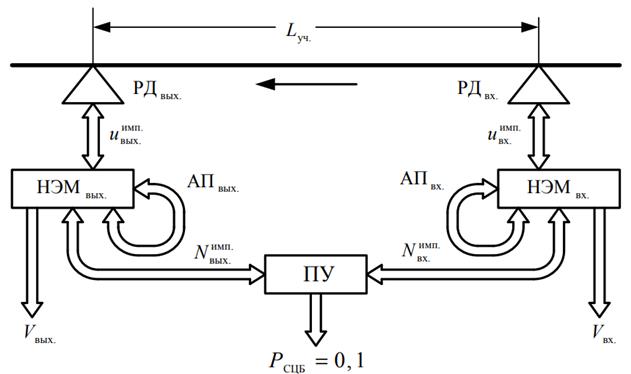
 и
и  в стандартные логические импульсы, число которых соответствует количеству колесных пар
в стандартные логические импульсы, число которых соответствует количеству колесных пар  и
и  , проследовавших через соответствующие рельсовые датчики:
, проследовавших через соответствующие рельсовые датчики: . (2.3)
. (2.3)
 и
и  поступает на входы постовых устройств (ПУ), и выходной сигнал ПУ выражается следующим функциональным выражением:
поступает на входы постовых устройств (ПУ), и выходной сигнал ПУ выражается следующим функциональным выражением: (2.4)
(2.4) и
и  используются в устройствах СЦБ для проверки свободности перегона и последующей дачи разрешения на прибытие поезда в полном составе. При этом появляется необходимость введения канала информации между ПУотпр и ПУпр, то есть между станциями. Каждый из них на основе собственной информации
используются в устройствах СЦБ для проверки свободности перегона и последующей дачи разрешения на прибытие поезда в полном составе. При этом появляется необходимость введения канала информации между ПУотпр и ПУпр, то есть между станциями. Каждый из них на основе собственной информации  (станции отправления) и принятой от соседней станции
(станции отправления) и принятой от соседней станции  (станции приема) самостоятельно реализует функции, подобные выражению (2.4).
(станции приема) самостоятельно реализует функции, подобные выражению (2.4).



