Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Программные средства моделирования системы управления объектомСодержание книги
Поиск на нашем сайте
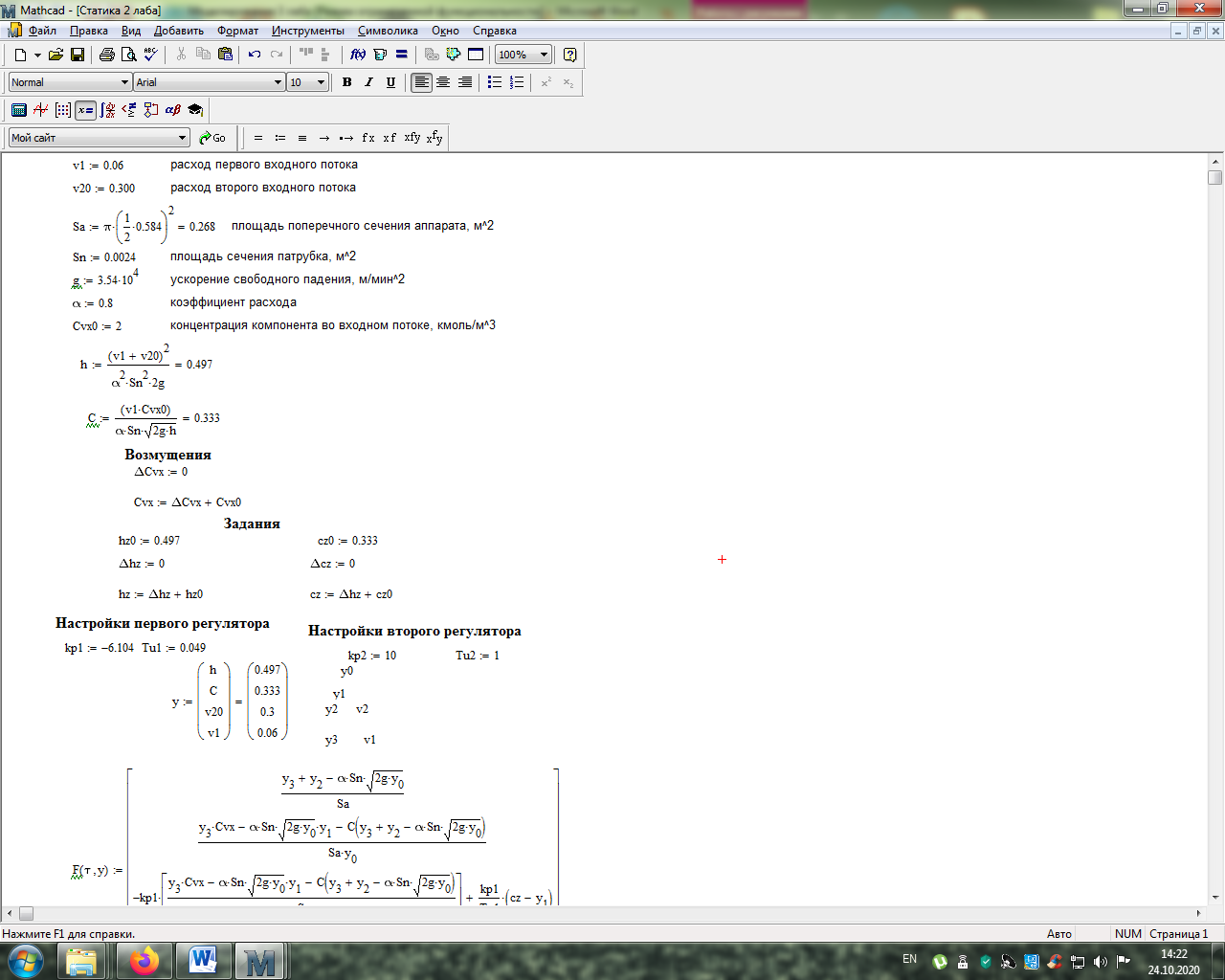
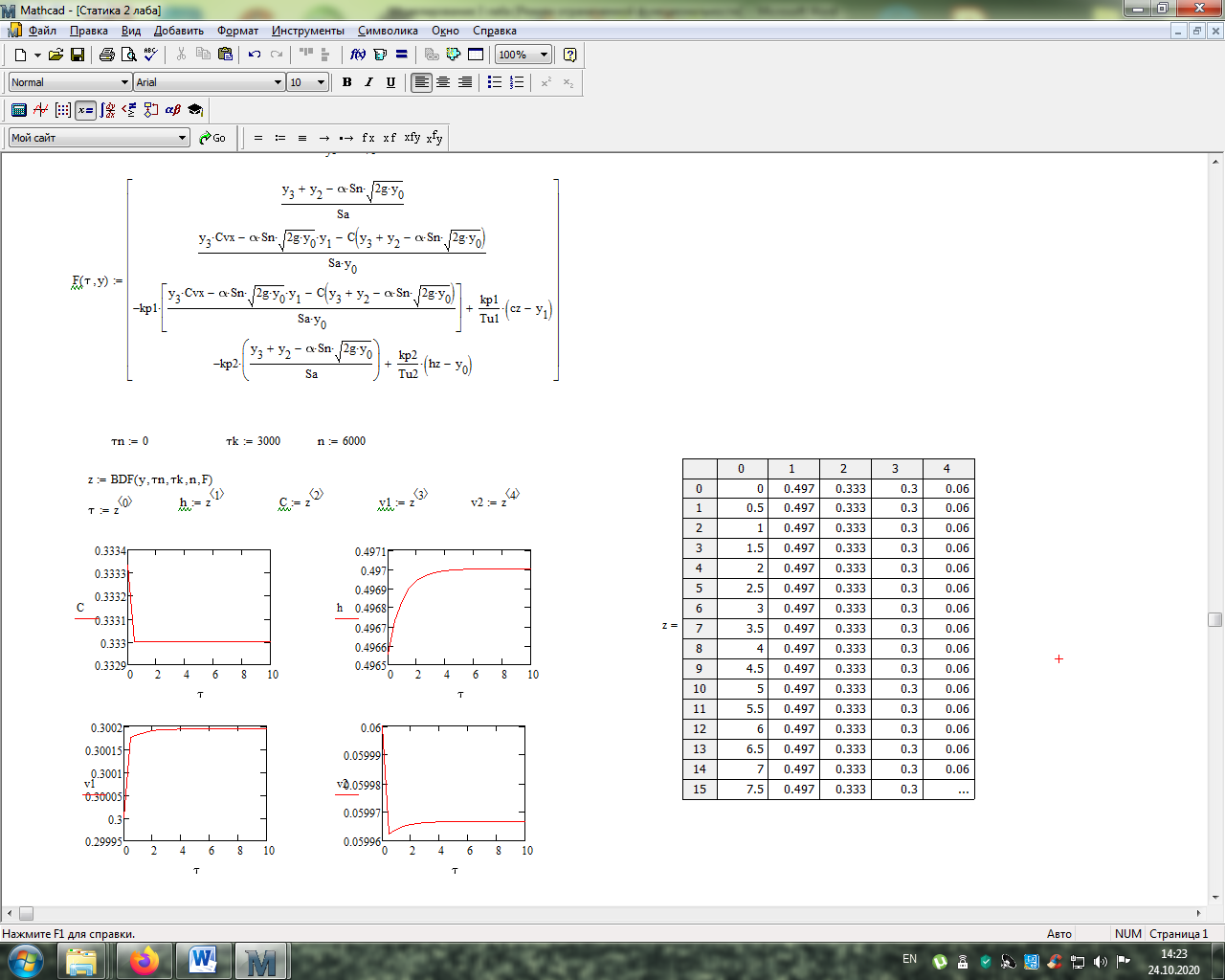
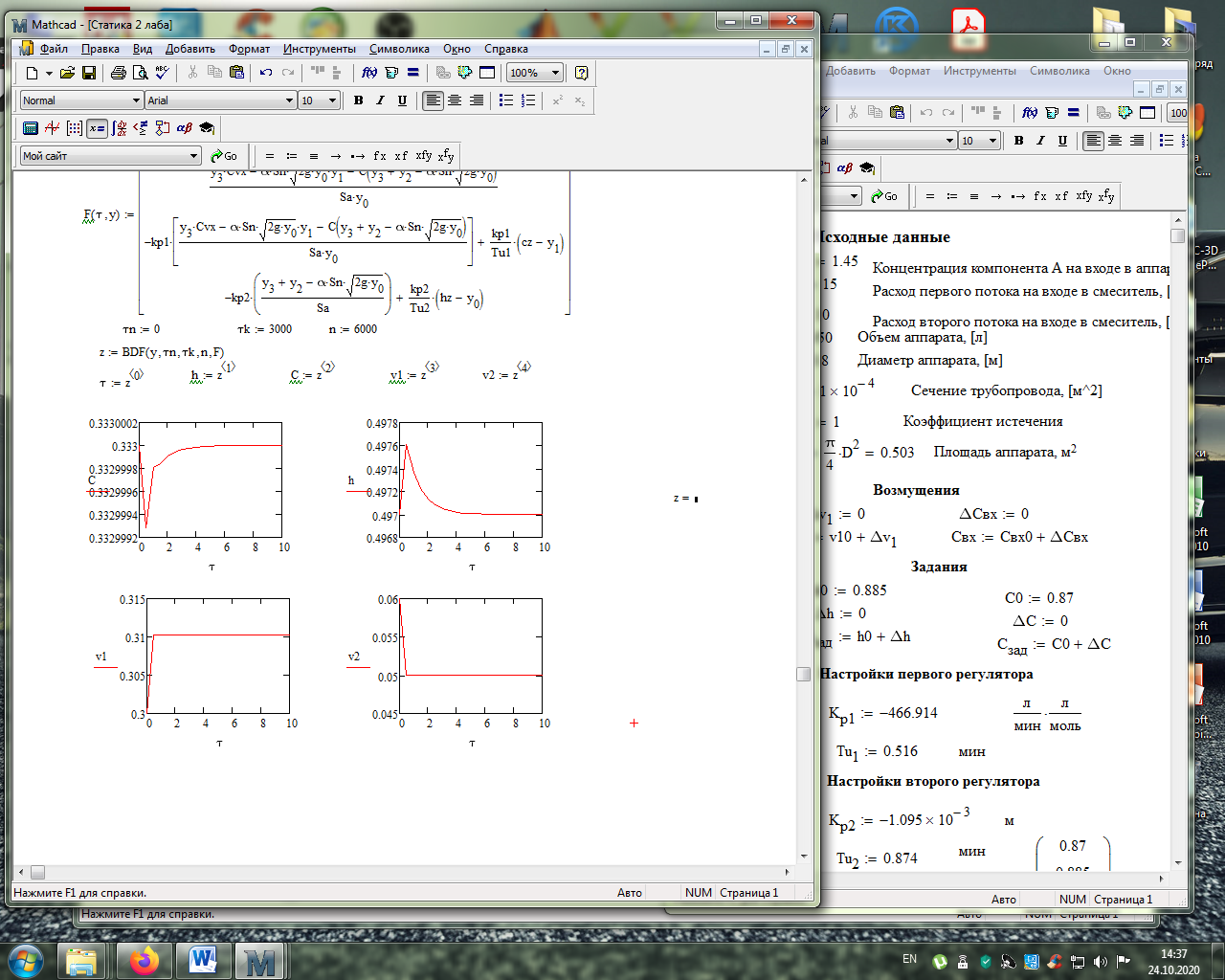
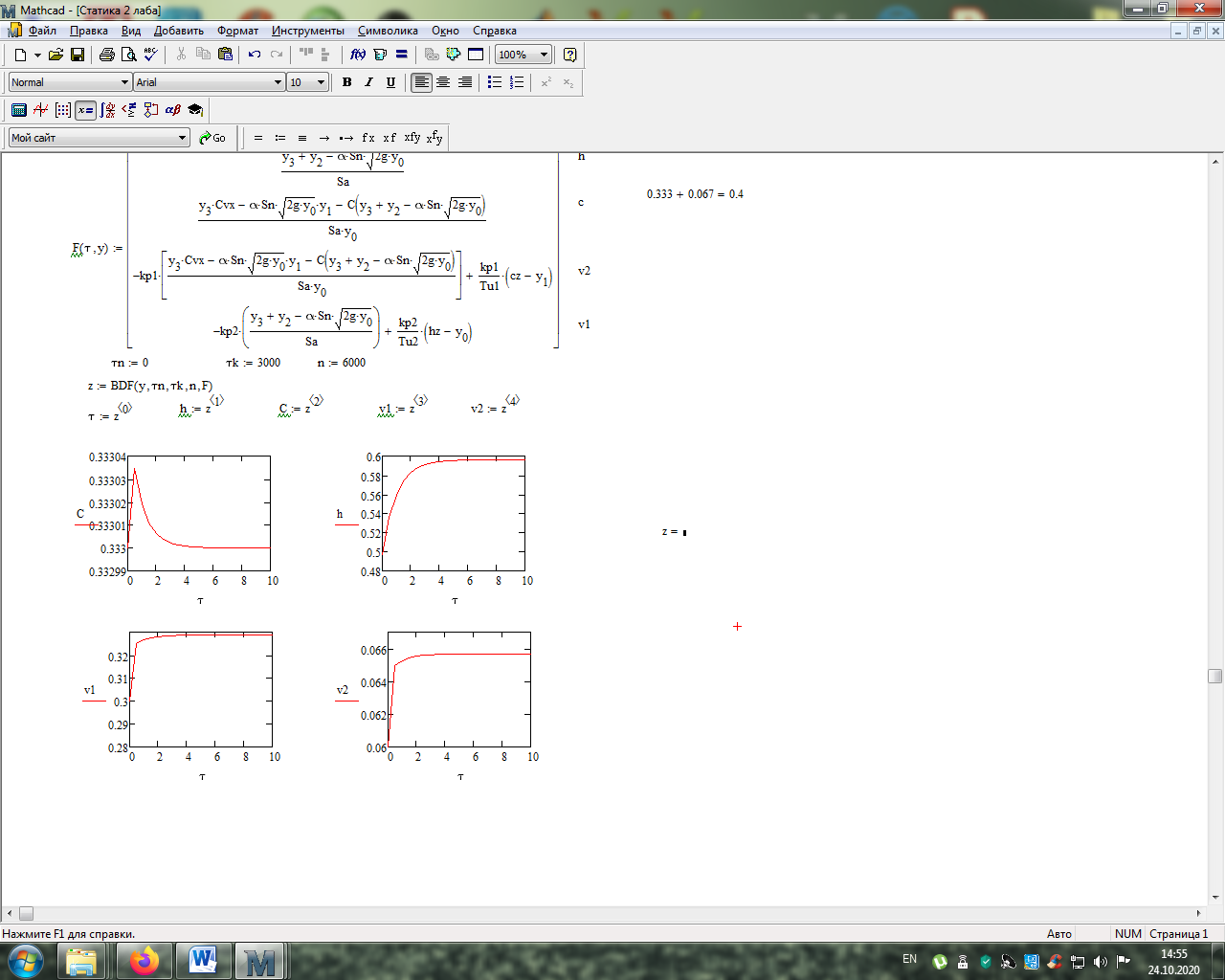
На данном этапе анализа объекта была разработана математическая модель. Листинг программы MahtCad представлен ниже:
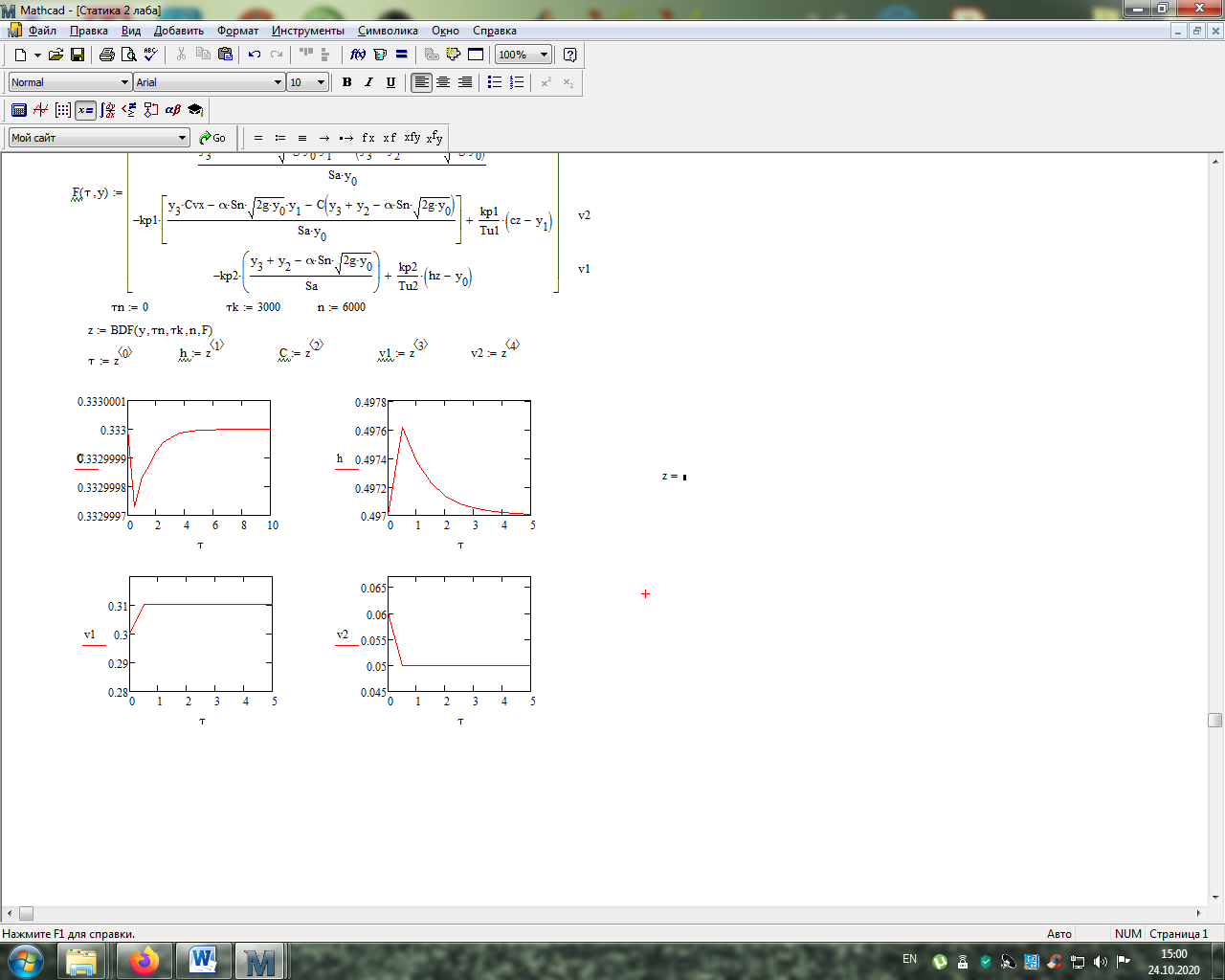
Моделирование системы управления объектом Исследуем нашу систему на устойчивость, ковариантность и инвариантность. Проверим устойчивость и инвариантность системы. По каналу возмущения Свх→C для концентрации увеличим и уменьшим на 20% концентрацию раствора на входе. Получим графики:
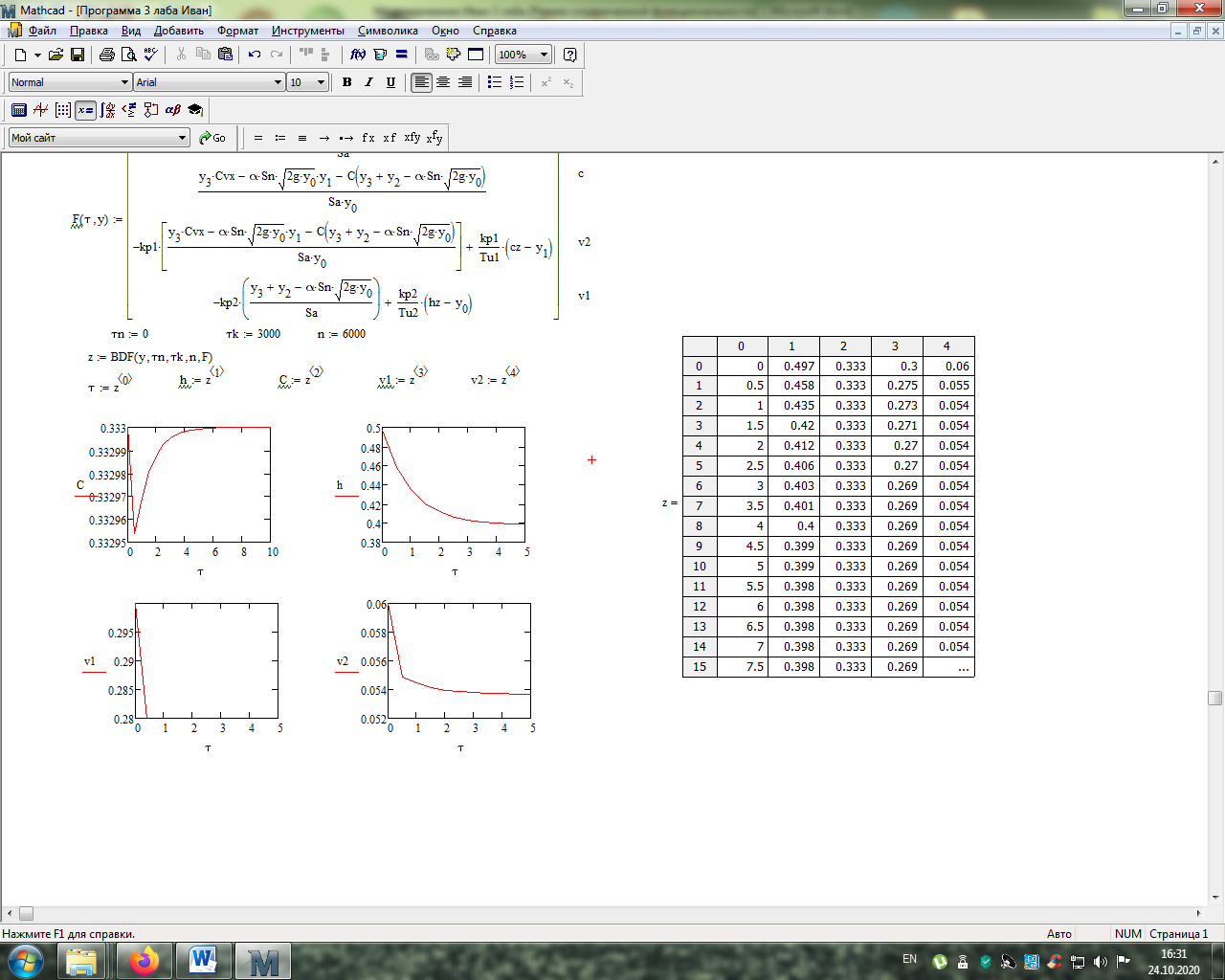
Рис.4 Переходные процессы регулирования при действии ступенчатого возмущения по Свх величиной ∆Свх=+0,2Свх0=+0,4 кмоль/м3
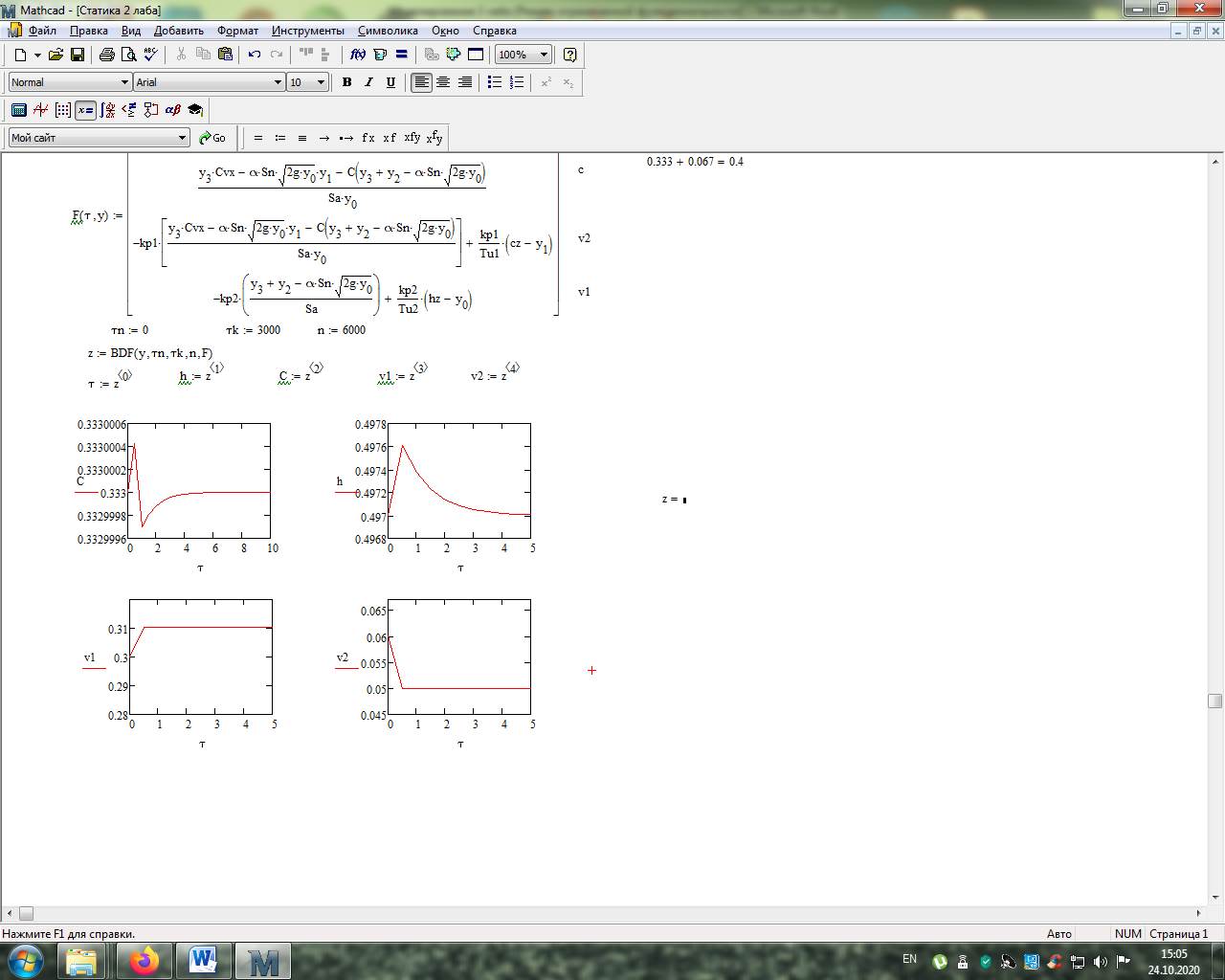
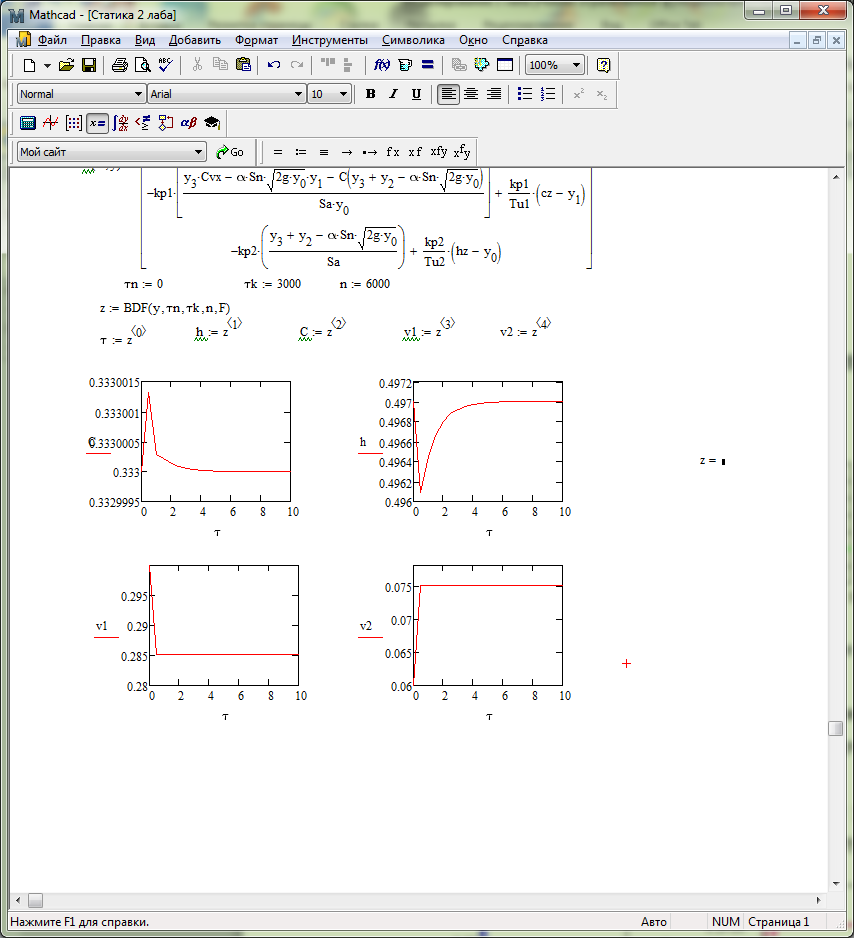
Рис.5 Переходные процессы регулирования при действии ступенчатого возмущения по Свх величиной ∆Свх=−0,2Свх0=−0,4 кмоль/м3 Данная система смогла подавить возмущение и вернула заданное значение концентрации жидкости. Проверим ковариантность системы. Изменим задание по каналу управления концентрацией: v2→C
Рис.6 Переходные процессы регулирования при ступенчатом изменении задающего воздействия по концентрации на величину ∆Сз=+0,2 С=0,067 кмоль/м3
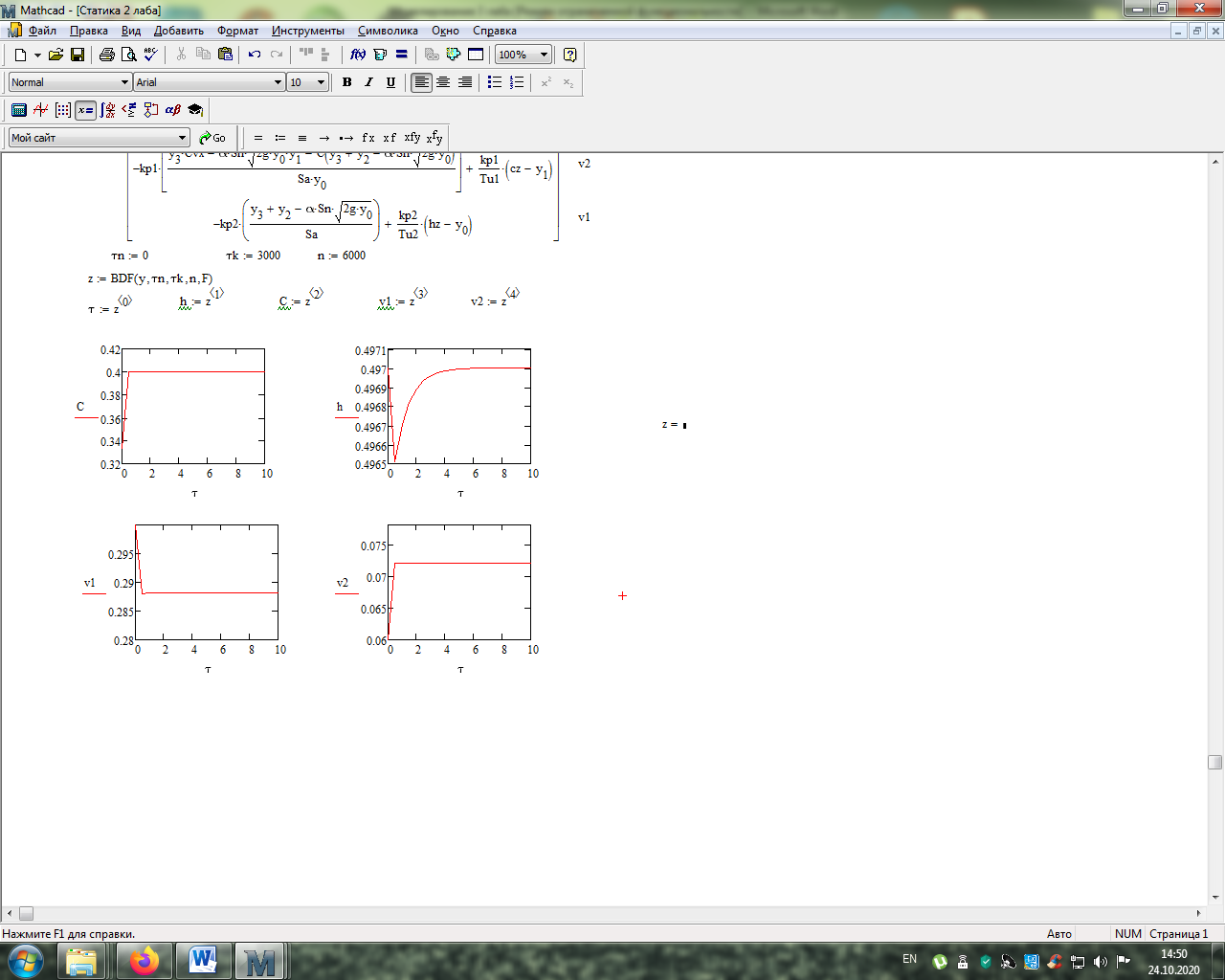
Рис.7 Переходные процессы регулирования при ступенчатом изменении задающего воздействия по концентрации на величину ∆Сз=−0,2 С=−0,067 кмоль/м3 Изменим задание по каналу управления уровнем: v1→h
Рис.8 Переходные процессы регулирования при ступенчатом изменении задающего воздействия по уровню на величину ∆hз=+0,2 h=0,099 м
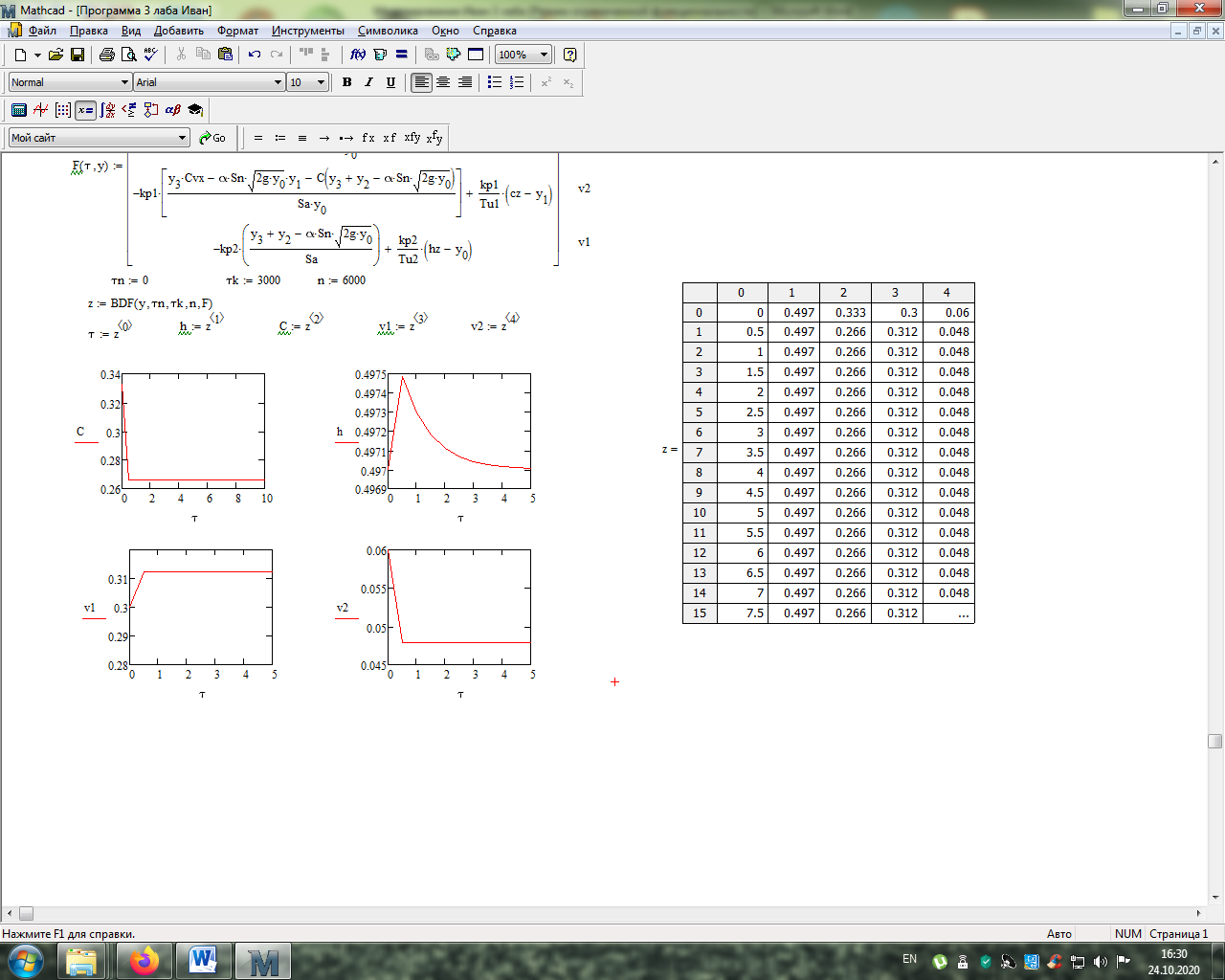
Рис.9 Переходные процессы регулирования при ступенчатом изменении задающего воздействия по уровню на величину ∆hз=−0,2 h=−0,099 м Исследовав данную систему на свойство ковариантности, можно сделать вывод, что модель справляется с изменением задания по двум каналам управления. Исследуем систему на робастность. Здесь для того чтобы исследовать СУ на робастность, будем менять значения коэффициента передачи для первого регулятора
Рис.11 Графики, отражающие влияние изменения коэффициента передачи
Вывод В ходе выполнения данной лабораторной работы, провели анализ и исследовали свойство смесителя как объекта управления и автоматизации. Выбрали регулирующие воздействия и наиболее сильные возмущения, составили структурную схему объекта. Была предложена функциональная схема автоматизации, Выбрали ПИ закон регулирования, в силу отсутствия в данном законе статической ошибки, его широкому распространению и легкости его применения. В соответствии с данным законом рассчитали настройки для двух регуляторов. В завершении провели исследование системы на инвариантность, ковариантноть и устойчивость. Можно сделать вывод, что данная система управления инвариантна к изменению входной концентрации при 20-ти процентном изменении данного параметра. Кроме того она ковариантна с двумя заданиям (концентрации и уровню). При подаче фиксированного возмущения по каналу управления концентрацией было проведено изменение коэффициента передачи (в сторону увеличения и уменьшения его значения на 20%) и даже с таким воздействием система справилась, а значит данная система управления является робастной.
|
||||
|
|
Последнее изменение этой страницы: 2021-07-18; просмотров: 113; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.216.3.63 (0.006 с.) |

 и значение коэффициента передачи второго регулятора
и значение коэффициента передачи второго регулятора  .
.