Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Ограничения и преимущества АИССодержание книги
Поиск на нашем сайте
На борту судна оборудование АИС используется судоводительским составом в следующих целях: • для предупреждения столкновений в качестве оборудования, дополняющее судовую РЛС и обеспечивающего получение информации о местоположении и параметрах движения других судов; • для получения дополнительной информации о других судах (название или позывной, тип судна, его навигационный статус, порт назначения, маршрут движения), позволяющей правильно оценить обстановку и принять решение по управлению судном; • для передачи другим судам и береговым службам сообщений, связанных с безопасностью мореплавания в соответствии с требованиями Правила V/31 Конвенции SOLAS-74; • для передачи информации в береговые службы, включая СУДС и обязательные системы судовых сообщений, что позволяет исключить радиотелефонный обмен или снизить его объем; • для получения от береговых служб местной навигационной информации и предупреждений (судоходная обстановка, обнаруженные опасности, состояние СНО. гидрометеорологическая информация); • для эффективного обнаружения средств навигационного оборудования (СНО), оснащенных АИС, и получения от них дополнительной информации (местоположение, статус, гидрометеорологические данные); • для повышения эффективности взаимодействия с ледоколами, буксирами и лоцманскими службами. Эффективное и безопасное использование АИС на судах возможно при условии надлежащей подготовленности судоводителей к применению этого нового вида навигационного оборудования. Судоводительский состав должен быть достаточно хорошо знаком с принципами работы, информационно-техническими характеристиками, возможностями и ограничениями АИС. Особую важность имеют навыки интерпретации отображаемой информации и ее практического использования в целях предупреждения столкновений. В настоящее время не установлены обязательные требования к подготовке судоводителей к использованию АИС. Однако целесообразность таких требований уже обсуждается в ММО и других международных и национальных организациях, связанных с безопасностью мореплавания. Не исключено, что в ближайшем будущем будет введена обязательная тренажерная подготовка судоводителей по использованию АИС, совмещенная с традиционной подготовкой по использованию РЛС и САРП. Основным назначением и главной функцией судового оборудования АИС является предупреждение столкновений судов. Правило 7 Международных Правил предупреждения столкновений судов (МППСС) требует от судов использования всех приемлемых в данной обстановке средств для оценки опасности столкновения, одним из которых следует считать установленное на судне оборудование АИС. Тем не менее, практическое использование АИС на судах в целях предупреждения столкновений возможно только после накопления необходимого опыта, соответствующей подготовленности судоводительского состава и окончательного решения проблемы отображения информации АИС на экранах судовых дисплеев. В ближайшее время, то есть до окончания периода внедрения АИС, судовое оборудование АИС следует применять только как средство, дополняющее радиолокационную станцию и другие способы наблюдения за навигационной обстановкой, а также как средство обмена информацией с береговыми службами. К ограничениям АИС, которые необходимо учитывать при использовании в целях предупреждения столкновений, следует отнести: • Значительная часть судов может быть не оборудована АИС даже по окончанию периода внедрения (рыбопромысловые, местного плавания, маломерные, прогулочные и другие). • Судовое оборудование АИС может быть выключено по распоряжению капитана судна, если использование АИС может отрицательно повлиять на безопасность судна (например, в районах, где возможна пиратская деятельность). • В районах с очень высокой интенсивностью судоходства возможно уменьшение реальной дальности действия АИС до 10 - 12 миль. • Сильные радиопомехи, например, во время грозы, могут вызвать кратковременные нарушения в работе АИС. • Достоверность и качество принятой информации частично может зависеть от датчиков, формирующих сообщения АИС, и от правильности ввода информации судоводителями на судах-целях (например, навигационный статус или маршрут движения). Принципы использования АИС в целях предупреждения столкновений во многом аналогичны принципам использования РЛС и САРП. Общими для двух видов оборудования являются графическое отображение местоположения других судов, экстраполяция взаимного движения с помощью векторов скорости, оценка опасности сближения по дистанции до точки кратчайшего сближения (Дкр) и по времени до точки кратчайшего сближения (Ткр). К преимуществам АИС по сравнению с обычным радиолокационным наблюдением и использованием средств автоматической радиолокационной прокладки (САРП) следует отнести: 1. Увеличение расстояния, на котором возможны обнаружение встречных судов и оценка опасности столкновения. Радиусом действия АИС в открытом море можно считать дальность ОВЧ радиосвязи. С учетом высоты установки антенн АИС над уровнем моря радиус действия АИС лежит в пределах 20 - 30 миль. В то же время дальность уверенного обнаружения и автоматического сопровождения встречного судна с помощью РЛС/САРП зависит от размеров судна-цели, погодных условий и других факторов и лежит в пределах 6-15 миль. Как следствие малое судно-цель, оборудованное АИС, будет обнаруживаться примерно на тех же расстояниях, что и крупные суда с помощью РЛС. 2. В районах с изрезанной береговой линией, в архипелагах, в узких проливах, фиордах и на реках АИС позволяет получать информацию по судам, находящимся в «теневых» секторах РЛС, обусловленных береговым рельефом. Этот эффект объясняется тем, что радиоволны ОВЧ диапазона (метровые), излученные ненаправленной антенной АИС за счёт огибания береговых препятствий или за счёт отражений от них могут распространяться не только в пределах прямой видимости, как радиоволны СВЧ диапазона (сантиметровые), применяемые в морской радиолокации. 3.На работу судовых РЛС и САРП могут оказывать отрицательное влияние отражения от морской поверхности, помехи от осадков и от соседних РЛС, ложные эхосигналы и другие внешние факторы. Существенно ухудшается работа радиолокационного оборудования на сильном волнении вследствие качки и попадания собственного судна и судна-цели между гребнями волн. В то же время, на работу АИС указанные факторы практически не оказывают никакого влияния. 4.Погрешности РЛС и радиолокационной прокладки, как правило, возрастают с увеличением расстояния до цели. Погрешности информации АИС остаются неизменными в пределах дальности действия и, как правило, существенно меньше соответствующих погрешностей радиолокационной прокладки, особенно в районах, где установлены дифференциальные станции ГНСС. В АИС отсутствуют понятие минимальная дальность действия («мертвая зона»), свойственное РЛС, благодаря чему возможно получение информации от рядом расположенных судов, например, ошвартованных лагом. 5.Эффективность АИС не снижается при использовании на акваториях портов и в стесненных водах, где очень трудно обеспечить своевременный захват и сопровождение целей с помощью САРП. Ограниченная разрешающая способность РЛС и отражения от береговых объектов не позволяют, как правило, вести наблюдение за судами, стоящими у причала. Как следствие, затруднено своевременное обнаружение с помощью РЛС и САРИ начала движения парома местного сообщения по акватории порта или пересекающего речной фарватер, что может быть обеспечено АИС. 6.При радиолокационной прокладке первичными данными о движении цели являются пеленг и дальность, а также определяемые на основе их изменения относительные курс и скорость. Истинные курс и скорость цели рассчитываются в САРП с учетом гирокомпасного курса и скорости по лагу собственного судна, что вносит в расчеты существенные погрешности, особенно при наличии течения и ветрового дрейфа. В АИС исходными данными являются вектор скорости цели относительно грунта (COG/SOG). Относительные курс и скорость цели рассчитываются с минимальными погрешностями с учетом известного вектора скорости собственного судна относительно грунта. 7. Эхосигнал цели, получаемый от РЛС, подвержен флуктуациям (случайным изменениям амплитуды, формы и временного положения). В результате положение точки автосопровождения в САРП нестабильно и обычно не совпадает с геометрическим центром судна - цели. Как следствие, появляются погрешности определения пеленга, дальности и других элементов движения цели. Для уменьшения случайной составляющей таких погрешностей в САРП применяют алгоритмы сглаживания (фильтрации), которые дают хорошие результаты при неизменных элементах движения цели. При изменении курса цели сглаживание серьезно затрудняет обнаружение маневра, а выдаваемые САРП значения относительного и истинного курса могут существенно запаздывать по отношению к фактическим значениям (в отдельных случаях разность может достигать 50 градусов). В АИС благодаря прямому получению данных о курсе цели (от гирокомпаса) и угловой скорости (при наличии соответствующего датчика), маневр цели обнаруживается практически одновременно с его началом. Различие в получаемых данных о направлении движения (COG) и курсе цели позволяет оценить угол дрейфа (сноса) цели. 8. Воздействие помех от осадков или попадание цели в теневой сектор может вызвать сброс цели с автоматического сопровождения в САРП. В случае прохождения двух целей на малом расстоянии друг от друга может произойти взаимное переключение автоматического сопровождения (swapping) с появлением грубых ошибок в вырабатываемых данных. Сопровождение целей средствами АИС лишено оказанных недостатков и отличается более высокой надежностью и стабильностью. Существенным достоинством использования АИС в целях предупреждения столкновений является возможность получения дополнительной информации о судне-цели, его типе и навигационном статусе (например, ограничено в возможности маневрирования), порте назначения и маршруте движения. Такая информация помогает правильной и полной оценке обстановки, а также выбору предполагаемого маневра расхождения. Важным достоинством АИС является автоматизация обмена информацией с береговыми службами, включая передачу предписанных правилами плавания обязательных сообщений в адрес Центров СУДС, систем судовых сообщений и других береговых служб. Использование АИС в этих целях позволяет снизить объем радиотелефонной связи судна с берегом, уменьшить нагрузку на судоводителей и отвлечение от непосредственного управления судном, что вносит определенный вклад в повышение безопасности плавания. Подготовка оборудования АИС к работе после включения занимает не более 2 минут, в течение которых выполняется автоматический контроль работоспособности, периодически повторяющийся в процессе работы. Если оборудование неисправно, включается сигнализация и прекращается передача информации. Вахтенный офицер на борту судна должен обеспечить ввод информации в оборудование АИС в начале рейса и, при необходимости, обновлять следующие данные: осадку, данные об опасном грузе, порт назначения и ЕТА, маршрут движения, навигационный статус, и сообщения, связанные с безопасностью. Вахтенный офицер должен периодически проверять информацию, передаваемую оборудованием АИС, в частности, позицию собственного судна в формате WGS-84, вектор путевой скорости (SOG/COG) и курс судна. Статическая информация о судне (идентификаторы, тип, размеры) должна проверяться, как минимум, один раз в течение рейса, но не реже, чем раз в месяц. При входе судна в район, где установлены частотные каналы АИС, отличающиеся от международных, следует убедиться, что произошло автоматическое переключение каналов по сигналам береговых станций. В некоторых районах, где такие станции отсутствуют, требуется выполнить ручное переключение каналов. В соответствии с Правилом 31 Главы V Конвенции SOLAS «капитан каждого судна, встретивший опасные льды, покинутое судно, представляющее опасность для плавания, любую другую прямую навигационную опасность..... обязан всеми имеющимися в его распоряжении средствами передать информацию об этом находящимся поблизости судам, а также компетентным властям». Установленное на судне оборудование АИС следует считать одним из таких средств. Использование АИС не устраняет необходимость передачи информации другими средствами, в том числе, требуемыми процедурами ГМССБ.
РАДИОПЕЛЕНГОВАНИЕ
Основы радиопеленгования
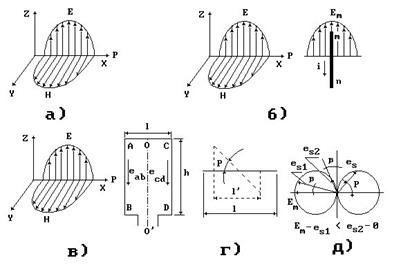
Радиопеленгованием называется процесс определения направления на источник радиоизлучения. Прибор, с помощью которого осуществляется этот процесс, называется радиопеленгатором. Он состоит из радиоприёмника со специальной антенной системой, основу которой составляет рамочная антенна (рамка). Построим график зависимости э.д.с. в рамке от угла её поворота (диаграмму направленности, рис. 23д). Как видно из него э.д.с. в рамке зависит от направления прихода электромагнитной волны (угла поворота рамки Р), т.е. рамка обладает направленными свойствами приёма. Они и используются для пеленгования.
Рис. 23. Теоретические основы радиопеленгования
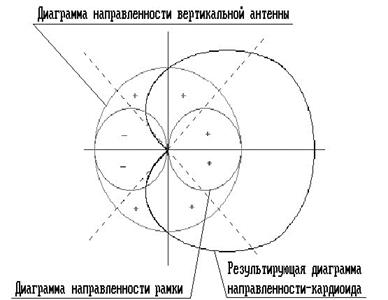
График (диаграмма направленности рамки – косинусоида) имеет два минимума и два максимума значений э.д.с. Т.е. если рамку развернуть таким образом, чтобы в ней наблюдался или максимум или минимум тока, то можно судить о направлении прихода радиоволны. Для пеленгования используется второй способ (по минимуму), т.к. он обеспечивает более резкое изменение э.д.с. при повороте рамки на один и тот же угол (при повороте рамки от оси минимумов слышимость принятого сигнала возрастает намного быстрее, нежели при повороте от оси максимумов происходит ослабление слышимости). Т.к. диаграмма направленности рамки имеет два минимума, то пеленгование с её помощью обладает многозначностью определений. Можно определить на какой линии находится радиоизлучатель, но нельзя сказать в какой стороне от рамки. Для устранения многозначности при пеленговании используется комбинированная антенная система – рамка и ненаправленная (штыревая) антенна. Диаграммы направленности этих антенн взаимонакладываются таким образом, чтобы диаграмма рамки (косинусоида) вписывалась в окружность – диаграмму направленности штыревой антенны (рис. 24).
Рис. 24. Получение кардиоиды
Т.к. направление тока в штыревой антенне не зависит от прихода радиоволны, (штыревая антенна не обладает направленными свойствами) условно принимается, что э.д.с. в ней имеет знак «+» во всех квадрантах координатной плоскости (рис. 24). Рамка – это направленная антенна и потому знаки э.д.с. в ней распределятся: «+» – в первом и четвертом квадранте, «–» – во втором и третьем. Сложение э.д.с. рамки и штыревой антенны с учетом знаков приводит к построению результирующей диаграммы (кардиоиды), которая будет иметь по одному минимуму и максимуму (рис. 24). Следовательно – кардиоида обладает однозначностью определения, которое используется для определения стороны пеленга.
Ошибки радиопеленгования
Радиопеленгование основывается на определении нормали к фронту волны. Если радиоволна распространяется в однородной среде, то направление на источник излучения совпадает с нормалью. В реальных условиях волна проходит над сушей и водной поверхностью, отражается от ионосферы, взаимодействует с судовым рангоутом, такелажем и надстройками. В результате фронт волны в точке приёма претерпевает изменения, что приводит к погрешностям пеленгования. Эти погрешности известны как ночной, береговой, антенный эффекты и радиодевиация.
Ночной эффект
Эта ошибка проявляется при использовании средневолнового диапазона. После захода солнца исчезает самый низкий слой ионосферы, который поглощает этот диапазон и, таким образом, препятствует появлению пространственной волны в дневное время. В результате ночью волны начинают отражаться от более высокого слоя ионосферы и возвращаться к поверхности земли. Ночной эффект – взаимоналожение поверхностной и пространственной (отраженной от ионосферы) радиоволн в точке приёма. Это взаимодействие приводит к изменению поляризации волны и искажению её фронта.
Береговой эффект
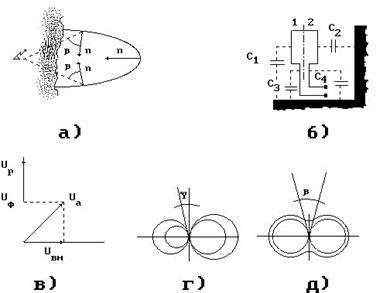
Если волна распространяется в однородной среде, то проекция её фронта на горизонтальную плоскость представляет окружность. При прохождении волны частично над сушей, а затем над водной поверхностью фронт её приобретает эллипсоидность (рис. 25а). В результате этого направление нормали n совпадает с направлением на источник радиоизлучения только при нахождении судна на главной оси этого эллипса (рис. 25а). При уклонении в сторону наблюдается рассогласование в виде угла β (рис. 25а), который называется радиосклонением.
Рис. 25. Береговой и антенный эффекты рамки
Антенный эффект
Как правило, в месте своей установки рамочная антенна пеленгатора имеет электрическую асимметрию относительно корпуса и надстроек (рис. 25б). Приходящее электромагнитное поле порождает в плечах 1 и 2 напряжение смещения, которое существует за счет влияния паразитных емкостей C1–C4 и не зависит от направления прихода волны. Т.е. рамка частично приобретает свойства ненаправленной антенны. Это напряжение называется напряжением антенного эффекта Uа (рис. 25в). Напряжение антенного эффекта отстаёт по фазе от полезного напряжения рамки Uр. Составляющая антенного эффекта, совпадающая по фазе с полезным напряжением называется фазной (Uф на рис. 25в), составляющая, отстающая на π/2 – внефазной (Uвн на рис. 25в). Действие фазной составляющей приводит к искажению идеальной диаграммы направленности рамки (косинусоиды) к виду с неодинаковыми петлями (рис. 25г). В результате появляется ошибка пеленгования, называемая углом излома оси минимумов g (рис. 25г). Внефазная составляющая искажает косинусоиду к гантелеобразному виду (рис. 25д). В результате нет ярко выраженного минимума сигнала в пределах угла b (рис. 25д), который называется углом расплывчатости минимума слышимости. Действие внефазной составляющей частично компенсируется при каждом пеленговании с помощью специальных электрических устройств, входящих в состав радиопеленгатора.
Радиодевиация
Электромагнитное поле пеленгуемого радиоисточника возбуждает переменные токи не только в рамочной антенне, но и в окружающих токопроводящих предметах: корпусе, надстройках, рангоуте, такелаже и др., которые становятся вторичными излучателями. Всю совокупность излучателей можно разделить на две большие группы: антенноподобные и контуроподобные. Под воздействием вторичных излучателей возникает самая большая ошибка пеленгования – радиодевиация. Наиболее значимыми элементами этой ошибки являются постоянная, четвертная и полукруговая составляющие. Появление постоянной составляющей обусловлено в общем случае смещением рамочной антенны в сторону от диаметральной плоскости. Компенсация этой ошибки производится разворотом шкалы пеленгатора на угол, равный ей. Радиодевиацию четвертного вида вызывают контуроподобные вторичные излучатели. Наиболее характерным здесь является корпус судна. Его рассматривают как эквивалент продольному контуру, образованному надводной частью судна. Частичное устранение этой составляющей производится один раз в год с помощью специально встроенных в пеленгатор электрических или электромеханических устройств. Полукруговая радиодевиация проявляется вследствие переизлучения поля радиомаяка антенноподобными вторичными излучателями. Наиболее характерными источниками полукруговой радиодевиации являются антенны судовых средств радиосвязи. Уменьшение этой составляющей производится при каждом пеленговании путем изоляции судовых антенн (их отключением от корпуса и аппаратуры). Остаточная суммарная радиодевиация имеет ярко выраженный четвертной характер. Таблица её обязательно прилагается к прибору и используется в качестве поправки к измеренным пеленгам.
Судовые радиопеленгаторы
Судовые радиопеленгаторы делятся на слуховые (СРП) и визуальные (ВРП). Основой этого подразделения служит способ регистрации определяемого направления. В СРП направление на источник радиоизлучения определяется по минимуму слышимости сигнала, а в ВРП – по положению изображения сигнала на экране электронно-лучевой трубки. Как известно, для определения направления на источник радиоизлучения необходима поворотная рамочная антенна. В судовых условиях применение поворотных рамок технически затруднено, и поэтому они заменены системой неподвижных рамок. Для СРП эти рамки в сочетании со специальным прибором – гониометром образуют приёмогониометрическое устройство, которое является основой СРП. Это устройство в большинстве случаев управляется оператором вручную. Однако, в настоящее время находят применение и автоматические СРП, в которых используют специальные следящие системы для поворота искательной катушки гониометра. В ВРП сигнал каждой рамки проходит через свой приёмный канал, которые имеют в качестве общего оконечного устройства – электронно-лучевую трубку (ЭЛТ) с электростатическим управлением. Такие устройства получили название – двухканальные визуальные радиопеленгаторы (ДВРП).
|
|||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 240; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.119 (0.015 с.) |