Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Математическое описание объекта управления в виде модели пространства состояния.
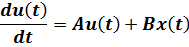
Уравнения состояния – система дифференциальных уравнений, записанных в нормальной форме Коши.
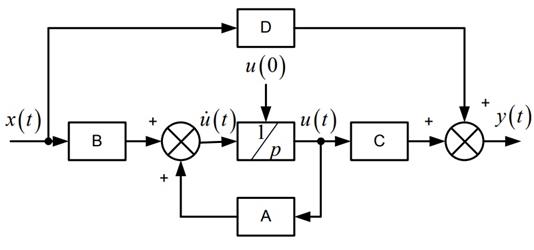
y (t) = Cu (t) + Dx (t) Где: u (t) - вектор состояния; x(t) y (t) - векторы входа и выхода системы; A- матрица коэффициентов; B -матрица управления; C -матрица выхода; D - матрица, характеризующая связь входного сигнала с выходным. Сущность данной формы представления заключается в том, что дифференциальное уравнение n - го порядка записывается в виде системы дифференциальных уравнений первого порядка. Процедура преобразования дифференциального уравнения n - го порядка в векторно – матричное уравнение, состоящее из n дифференциальных уравнений первого порядка, осуществляется путём введения дополнительных переменных. Эти дополнительные называются переменными состояния системы, объекта. Структурная схема непрерывной линейной системы, представленной в виде переменных состояний, представленной в виде переменных состояний.
Матрицы пространства состояния найдем, используя систему Octave пакета Control. >> wo1=tf([0.198864 1.25568 0.697727 0.090909], [0.0696023 0.837216 2.75557 1.57045 1])
Transfer function 'wo1' from input 'u1' to output...
0.1989 s^3 + 1.256 s^2 + 0.6977 s + 0.09091 y1: ------------------------------------------------ 0.0696 s^4 + 0.8372 s^3 + 2.756 s^2 + 1.57 s + 1
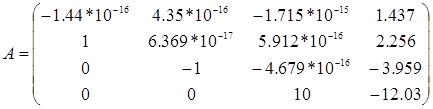
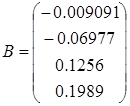
Continuous-time model. >> ss(wo1) ans.a = x1 x2 x3 x4 x1 -1.444e-016 4.351e-016 -1.715e-015 1.437 x2 1 6.369e-017 5.912e-016 2.256 x3 0 -1 -4.679e-016 -3.959 x4 0 0 10 -12.03 ans.b = u1 x1 -0.009091 x2 -0.06977 x3 0.1256 x4 0.1989 ans.c = x1 x2 x3 x4 y1 0 0 0 14.37 ans.d = u1 y1 0
Нахождение передаточной функции по задающему и возмущающему воздействию. Уравнение динамики АСУ Передаточная функция системы по задающему воздействию.
-
Где:
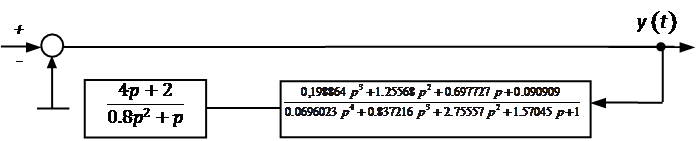
Передаточную функцию типовой одноконтурной системы управления по задающему воздействию найдем по выражению.
Используя систему Octave пакета Control. >> wp=tf([4 2],[0.8 1 0])
Transfer function 'wp' from input 'u1' to output...
4 s + 2 y1: ----------- 0.8 s^2 + s
Continuous-time model. >> wo=tf([0.198864 1.25568 0.697727 0.090909], [0.0696023 0.837216 2.75557 1.57045 1]) Transfer function 'wo' from input 'u1' to output...
0.1989 s^3 + 1.256 s^2 + 0.6977 s + 0.09091 y1: ------------------------------------------------ 0.0696 s^4 + 0.8372 s^3 + 2.756 s^2 + 1.57 s + 1
>> wzv=feedback(wo*wp) Transfer function 'wzv' from input 'u1' to output...
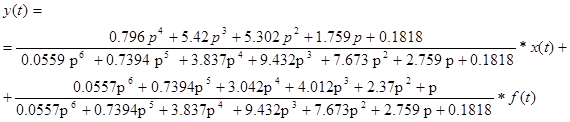
0.7955 s^4 + 5.42 s^3 + 5.302 s^2 + 1.759 s + 0.1818 y1: ------------------------------------------------------------------------------- 0.05568 s^6 + 0.7394 s^5 + 3.837 s^4 + 9.432 s^3 + 7.673 s^2 + 2.759 s + 0.1818
Используя систему Octave пакета Control. >> woc=wo*wp Transfer function 'woc' from input 'u1' to output... 0.7955 s^4 + 5.42 s^3 + 5.302 s^2 + 1.759 s + 0.1818 y1: --------------------------------------------------------------- 0.05568 s^6 + 0.7394 s^5 + 3.042 s^4 + 4.012 s^3 + 2.37 s^2 + s
Передаточная функция системы по задающему воздействию:
>> wvv=feedback(1,woc) Transfer function 'wvv' from input 'u1' to output... 0.05568 s^6 + 0.7394 s^5 + 3.042 s^4 + 4.012 s^3 + 2.37 s^2 + s y1: ------------------------------------------------------------------------------- 0.05568 s^6 + 0.7394 s^5 + 3.837 s^4 + 9.432 s^3 + 7.673 s^2 + 2.759 s + 0.1818
Уравнение динамики АСУ
Исследование объекта управления на устойчивость
|
|||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 260; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.15.147.215 (0.007 с.) |



 +
+  - передаточная функция регулятора
- передаточная функция регулятора – передаточная функция объекта управления по стандартной форме записи дифференциального уравнения.
– передаточная функция объекта управления по стандартной форме записи дифференциального уравнения.