Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Алгебраический критерий устойчивости Гурвица ⇐ ПредыдущаяСтр 3 из 3
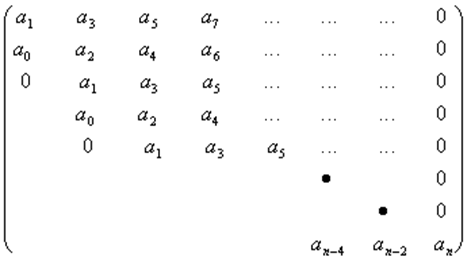
Cоставляется квадратная матрица Гурвица размерностью nxn. Первая строка матрицы Гурвица составляется из коэффициентов уравнения, начиная со второго, через один. Вторая строка составляется из коэффициентов уравнения, начиная с первого, через один. Элементы каждой последующей строки формируются из коэффициентов, имеющих индекс на единицу ниже индекса элемента в соответствующем столбце вышележащей строки.
Определение. Чтобы линейная система уравнений была устойчива, необходимо и достаточно положительности диагональных миноров матрицы Гурвица при условии Составим миноры матрицы Гурвица для собственного оператора системы.
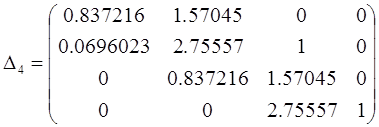
Вычислим определители с помощью Octave. >> d4=[0.837216 1.57045 0 0; 0.0696023 2.75557 1 0; 0 0.837216 1.57045 0; 0 0.0696023 2.75557 1] d4 =
0.83722 1.57045 0.00000 0.00000 0.06960 2.75557 1.00000 0.00000 0.00000 0.83722 1.57045 0.00000 0.00000 0.06960 2.75557 1.0000
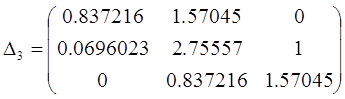
>> d3=[0.837216 1.57045 0; 0.0696023 2.75557 1; 0 0.837216 1.57045] d3 =
0.83722 1.57045 0.00000 0.06960 2.75557 1.00000 0.00000 0.83722 1.57045
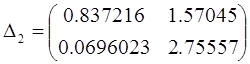
>> d2=[0.837216 1.57045; 0.0696023 2.75557] d2 =
0.837216 1.570450 0.069602 2.755570
>> det(d4) ans = 2.7504 >> det(d3) ans = 2.7504 >> det(d2) ans = 2.1977
Т.к. все определители матрицы Гурвица больше нуля, то система устойчива. Запас устойчивости смотрим по минору
Частотный критерий Михайлова
Для устойчивости линейной системы автоматического управления необходимо и достаточно, чтобы годограф Михайлова, начинаясь на действительной, положительной полуоси при изменении w от 0 до бесконечности, последовательно, в положительном направлении (против часовой стрелки) обходил n квадрантов, где n- порядок характеристического уравнения. Собственный оператор системы
Построим годограф Михайлова с помощью Octave: >> figure(1) >> a0=1; >> a1=1.57045; >> a2=2.75557; >> a3=0.837216; >> a4=0.0696023; >> Re=[]; >> Im=[]; >> for w=0.01:0.01:100, Njw=a4*((w*j)^4)+a3*((w*j)^3)+a2*((w*j)^2)+a1*(w*j)+(a0); Re = real(Njw); Im = imag(Njw); plot(Re, Im, 'k.') xlabel('Re(W)') ylabel('Im(W)') hold on grid on axis([-100 100 -100 100]) end
Рисунок 3- Годограф Михайлова для собственного оператора объекта управления(для разных масштабов)
Годограф Михайлова поворачивается на 180 градусов(w≠∞) => система устойчива. Для критерия Михайлова запасом устойчивости является удаленность годографа D (jω) от начала координат, годограф проходит довольно далеко от начала координат, т.е. запас устойчивости есть, и весьма большой.
Определение устойчивости объекта управления разными способами дало одинаковый результат (система устойчива с большим запасом устойчивости)
ЗАКЛЮЧЕНИЕ Умение разделять САУ на основные функциональные элементы и составлять функциональные и структурные схемы способствует ясности представлений о физических процессах, происходящих в системе, и имеет большое значение для дальнейшего исследования и расчета систем. Целью курсовой работы по дисциплине «Теория управления» является закрепление теоретических знаний и овладение навыками анализа и синтеза систем автоматического управления объектами на примере металлорежущих станков и промышленных роботов. При выполнении курсовой работы приобретается опыт разработки и расчета САУ производственными процессами и отдельными объектами в машиностроении. В курсовой работе были решены поставленные задачи: 1. Исходная структурная схема приведена к типовой одноконтурной системе автоматического управления. 2. Линейное дифференциальное уравнение объекта, определенное по передаточной функции управления было приведено к стандартной форме записи; 3. Получено описание объекта управления через нули полюса и коэффициенты усиления системы; 4. Получено описание объекта управления в форме матрицы пространства состояния. 5. Найдена передаточную функцию системы по задающему и возмущающему воздействию. Записано уравнение динамики АСУ. 6. Объект управления исследован на устойчивость алгебраическими и частотными методами, был определен запас устойчивости. 7. Выбран закон управления и произведен расчет настроечных параметров регулятора по заданным параметрам качества управления.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Теория автоматического управления. Методические указания и варианты заданий для практических занятий. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 42 с.- Электрон. опт. диск (CD-ROM).
2. Теория автоматического управления. Методические указания для самостоятельной работы студентов. [Электронный ресурс] /Сост. Г.Г. Гоппе, З.А. Федорова. - Иркутск: Изд-во НИ ИрГТУ, 2012.- 71 с.- Электрон. опт. диск (CD-ROM). 3. Гоппе Г.Г., Федорова З.А. Теория автоматического управления. Методическое пособие и варианты заданий для курсового проектирования студентам специальностей: 1804 – Электропривод и автоматика промышленных и технологических комплексов; 1807 – Электрический транспорт– Иркутск, Изд-во ИрГТУ, 2003 г.- 26 c.
|
||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 190; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 18.220.66.151 (0.01 с.) |
 >0.
>0.

 ; он больше нуля=> запас устойчивости есть, но т.к. величина маленькая, то и запас устойчивости системы будет большим.
; он больше нуля=> запас устойчивости есть, но т.к. величина маленькая, то и запас устойчивости системы будет большим.