
Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Кинематический расчет приводаСтр 1 из 6Следующая ⇒
Задание на курсовой проект
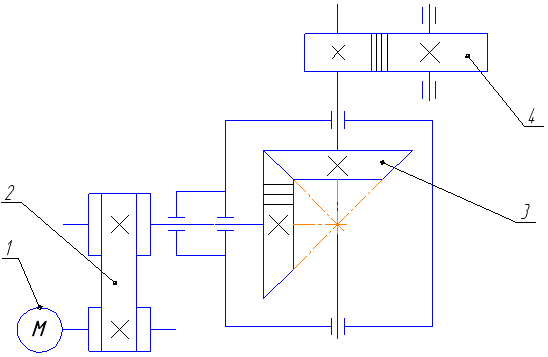
Привод состоит из следующих основных частей (рисунок 1.1): 1 – электродвигатель; 2 – клиноременная передача; 3 – конический редуктор с прямыми зубьями; 4 – открытая зубчатая пара с прямыми зубьями.
Рисунок 1.1 – Кинематическая схема привода
Исходные данные:
Тип ремня – клиновой. Тип зуба конической и цилиндрической передач – прямой.
Кинематический расчет привода Подбор приводного электродвигателя
Определим требующую мощность электродвигателя /1, с. 5/
где
где
Примем Перегрузка составляет Для того чтобы размеры редуктора, открытой и ременной передач были средними, примем двигатель марки AИР132М4 с синхронной частотой вращения 1500 об/мин /1,2/ (таблица 1).
Таблица 2.1.1 – Характеристика принятого электродвигателя
Определим номинальную частоту вращения вала электродвигателя
Определение передаточных чисел привода Определим исходное суммарное передаточное число привода
где
По рекомендациям /1, с. 7/ подберем передаточные числа привода. Примем
Определим разницу между расчетными исходным
Определение частот вращения и угловых скоростей на валах привода
Определение вращающих моментов и мощностей на валах привода
Для удобства просмотра кинематический расчет сведем в таблицу (табл. 2.4.1)
Таблица 2.4.1 – Результат кинематического расчета
Расчет закрытой конической передачи
Индексы валов привода, которые предложены в кинематическом расчете, поменяем следующем образом, вал который является входным (быстроходным) в редуктор будет иметь индекс «1», а выходной (тихоходный) – индекс «2», это связано с удобством ведения расчета.
Проверочный расчет передачи при помощи ПК «Компас»
В результате расчета выявлено, что зацепление с найденными параметрами существует (рис. 3.5.1).
Предварительный расчет геометрических параметров
Выбор сечения ремня произведем по номограмме /4, с. 86/ в зависимости от мощности, передаваемой ведущим шкивом и его частоты вращения. При этом учтем то, что клиновые ремни нормального сечения О применять только для передач мощностью до 2 кВт. При Минимально допустимый диаметр ведущего шкива определим в зависимости от крутящего момента на ведущем шкиве и выбранного сечения ремня. При
В целях повышения сроков службы ремней рекомендуется применять ведущие шкивы с диаметром Предварительно примем
Диаметр ведомого шкива
где
Примем Фактическое передаточное число передачи
Проверим отклонение фактического передаточного числа от заданного заранее
не превышает допустимое отклонение. Ориентировочное межосевое расстояние
где
Далее расчет произведем в программном комплексе «Компас».
Проектный расчет
Рисунок 5.1.1 – Геометрический расчет Проверочный расчет
Рисунок 5.2.1 – Проверочный расчет
В результате расчета при помощи программного комплекса «Компас» получены геометрические параметры, которые позволяют передаче быть работоспособной. Сила давления комплекта клиновых ремней на вал /4, с. 97/
где
что допустимо для клиновых ремней.
где
Схема нагружения привода
Схему сил действующих в приводе (рисунок 6.1) вычертим по рекомендациям /4, с. 105/.
Рисунок 6.1 – Схема нагружения привода
Для удобства просмотра значений сил, возникающих в передачах привода с учетом индексирования, принятым для привода, составим таблицу 6.1
Таблица 6.1 – Значения сил передач привода (значения в Н)
Выбор материала вала
В проектируемых редукторах рекомендуется применять термически обработанные среднеуглеродистые и легированные стали 45, 40Х, одинаковые для быстроходного и тихоходного вала /4, с. 110/. Примем сталь 45, с термообработкой – улучшение, со следующими механическими характеристиками /4, с. 53/
Компоновочная схема привода
На рисунке 8.1 представлена компоновочная схема привода.
Рисунок 8.1 – Схем привода
Позициями обозначены следующие элементы привода: 1 – электродвигатель; 2 – шкив ведущий ременной передачи; 3 – ремни; 4 – шкив ведомый ременной передачи; 5 – редуктор конический; 6 – рама сварная; 7 – натяжное устройство ремней.
Литература
1 Дунаев П. Ф. Конструирование узлов и деталей машин. Учеб. пособие для студ. Техн. Спец. Вузов / П.Ф. Дунаев, О.П. Леликов. – 8-е изд., перераб. И доп. –М.: Издательский центр «Академия», 2004. – 496 с. 2 Детали машин. Основы проектирования и конструирования: Метод. Указания по выполнению курсового проектирования / Г. Н. Лимаренко, А. А. Максимова и др. Красноярск: ИПЦ КГТУ, 2003. 64с. 3 Чернилевский Д. В. Детали машин. Учебное пособие для вузов. М.: Учебная литература, 2001. – 561с. 4 Шейнблит А.Е. Курсовое проектирование деталей машин: Учеб. Пособие. Изд. 2-е, перераб. и доп. – Калининград: Янтар. сказ, 2006. – 456 с.: ил, черт. – Б. ц. 5 Титовская В. О. Расчет и проектирование валов редукторов. Методические указания к выполнению курсового проекта. Красноярск, КГТУ, 1982, 68 с.
Задание на курсовой проект
Привод состоит из следующих основных частей (рисунок 1.1): 1 – электродвигатель; 2 – клиноременная передача; 3 – конический редуктор с прямыми зубьями; 4 – открытая зубчатая пара с прямыми зубьями.
Рисунок 1.1 – Кинематическая схема привода
Исходные данные:
Тип ремня – клиновой. Тип зуба конической и цилиндрической передач – прямой.
Кинематический расчет привода
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Последнее изменение этой страницы: 2021-05-12; просмотров: 155; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.14.130.24 (0.053 с.) |
 кВт;
кВт; об/мин.
об/мин.
 – общий КПД привода, определяемый как произведение КПД последовательно соединенных передач /1, с. 5/.
– общий КПД привода, определяемый как произведение КПД последовательно соединенных передач /1, с. 5/. ,
, – КПД ременной передачи;
– КПД ременной передачи; – КПД закрытой конической передачи;
– КПД закрытой конической передачи; – КПД открытой цилиндрической передачи.
– КПД открытой цилиндрической передачи. кВт.
кВт. кВт /1, с. 459/.
кВт /1, с. 459/. – привод будет испытывать перегрузку по мощности, это связано с тем, что ряд мощностей серии АИР не предусматривает промежуточных значений между
– привод будет испытывать перегрузку по мощности, это связано с тем, что ряд мощностей серии АИР не предусматривает промежуточных значений между  и
и  кВт.
кВт.
 об/мин.
об/мин. ,
, – асинхронная частота вращения двигателя, об/мин.
– асинхронная частота вращения двигателя, об/мин. .
. – ременная передача;
– ременная передача; – коническая закрытая передача;
– коническая закрытая передача; – цилиндрическая открытая передача.
– цилиндрическая открытая передача. передаточным числом привода и новым принятым
передаточным числом привода и новым принятым  /2, с. 12/
/2, с. 12/ ;
; ;
; – что допустимо.
– что допустимо. об/мин;
об/мин; об/мин;
об/мин; об/мин;
об/мин; об/мин;
об/мин; рад/с;
рад/с; рад/с;
рад/с; рад/с;
рад/с; рад/с.
рад/с. Нм;
Нм; Нм;
Нм; Нм;
Нм; Нм;
Нм; кВт;
кВт; кВт;
кВт; кВт;
кВт; кВт.
кВт. , рад/с
, рад/с



 кВт и
кВт и  об/мин примем ремень узкого сечения типа УО.
об/мин примем ремень узкого сечения типа УО. Нм и типе ремня УО примем
Нм и типе ремня УО примем мм.
мм. в 1..2 раза больше
в 1..2 раза больше  из стандартного ряда /4, с. 448/.
из стандартного ряда /4, с. 448/. мм.
мм. ,
, – коэффициент скольжения.
– коэффициент скольжения. мм.
мм. мм /4, с. 448/.
мм /4, с. 448/. .
.
 ,
, – высота сечения клинового ремня, мм.
– высота сечения клинового ремня, мм. мм – для ремня типа УО.
мм – для ремня типа УО. мм.
мм.

 ,
, – угол обхвата ремнем ведущего шкива, град;
– угол обхвата ремнем ведущего шкива, град; – количество клиновых ремней (рис. 5.1.1);
– количество клиновых ремней (рис. 5.1.1);  – сила предварительного натяжения одного клинового ремня, Н.
– сила предварительного натяжения одного клинового ремня, Н.
 ,
, м/с – окружная скорость ремня (рис. 5.1.1);
м/с – окружная скорость ремня (рис. 5.1.1); – коэффициент угла обхвата на меньшем шкиве;
– коэффициент угла обхвата на меньшем шкиве; – коэффициент динамичности нагрузки и длительности работы;
– коэффициент динамичности нагрузки и длительности работы;  /4, с. 82/.
/4, с. 82/. – при односменной работе и нагрузке с умеренными колебаниями.
– при односменной работе и нагрузке с умеренными колебаниями. Н.
Н. Н.
Н.

 ,
, 
 ,
, 
 ,
, 
 ,
, 
 ,
, 
 МПа – предел прочности;
МПа – предел прочности; МПа – предел текучести;
МПа – предел текучести; МПа – предел выносливости.
МПа – предел выносливости.



