Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь FAQ Написать работу КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Основы автоматизированного проектированияСодержание книги
Поиск на нашем сайте
ОСНОВЫ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ Цели и задачи курса Эта дисциплина является продолжением цикла дисциплин «Прикладная информатика», «Компьютерные технологии». Основные задачи курса: 1) Рассмотреть процесс проектирования сложных технических систем, к которым относится БЛА с теоретических позиций и подходов к его автоматизации; 2) Рассмотреть методы и модели, как самих объектов, так и процессов их проектирования, а также построения информационной среды решения проектных задач; 3) Рассмотреть вопросы практического применения теоретических положений курса на примере формирования математических моделей и программных средств решения проектных задач расчета массогабаритных характеристик БЛА. Литература. 1. Норенков И.П. Основы автоматизированного проектирования. Учеб. для вузов. 2-е изд., перераб. и доп. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2002. 2. Петраш В.Я. Автоматизация проектирования. Формирование проектных решений БЛА. – М: Изд-во МАИ, 2016 3. Петраш В.Я. Формирование модульного ряда программных фрагментов задач расчета массы и размеров БЛА. – М: Изд-во МАИ, 2021
Лабораторные работы – Цель: Изучить и практически реализовать модульное построение ПО автоматизированного проектирования БЛА на примере задач расчета массогабаритных характеристик БЛА.
ОСНОВЫ АВТОМАТИЗИРОВАННОГО ПРОЕКТИРОВАНИЯ ВВЕДЕНИЕ Отличительной особенностью таких сложных технических систем, как БЛА, является постоянное расширение сфер и условий их применения. Современные ЛА – это многофункциональные, многоцелевые системы, рассчитанные на выполнение целевых задач в широком спектре внешних условий и противодействий окружающей среды. Это обуславливает усложнение их конструкции, а, следовательно, рост затрат и сроков разработки новых изделий. Как результат – резкое увеличение объема проектных работ, потоков информации и проектной документации. Увеличение сроков проектирования часто приводит к тому, что проектируемый БЛА морально устаревает раньше, чем он поступает в производство. Практика показала, что решение этих проблем возможно только при условии комплексной автоматизации проектно-конструкторской деятельности. Применение вычислительной техники для решения отдельных проектных задач началось с ее появлением. Однако это были отдельные, не взаимосвязанные программы, каждая из которых была по-своему уникальна. Поскольку при их создании использовались традиционные методы неавтоматизированного проектирования, то их применение не могло дать ожидаемого эффекта. Разработка новых методов потребовала учета возможностей, не только технической составляющей проектирования, но и коллективного характера процесса проектирования, а также методов принятия решения при выполнении проектных работ. Выделение автоматизированного проектирования в самостоятельное научно-техническое направление объясняется, прежде всего, тем, что постановка и методы решения проектных задач при автоматизированном и неавтоматизированном проектировании существенно различаются. По существу автоматизация проектирования базируется на математическом моделировании процесса функционирования проектируемого объекта и всех его компонентов при выполнении множества поставленных перед ним целевых задач. При их решении используются постоянно совершенствуемые методы математического моделирования, принятия решений в условиях неопределенности, методы многокритериальной оптимизации, многовариантного поиска и др. Таким образом, для автоматизации процесса проектирования необходимо решить комплекс проблем: · структурирование и унификацию информации об объектах (включая все их компоненты), так и процессов проектирования, · разработку методов, моделей, алгоритмов, программно-информационных средств решения проектных задач; · разработку технических, программных, информационных, методических и других средств, обеспечивающих процесс проектирования; · решение вопросов объединения в единую организационно-техническую систему всех этих средств автоматизации с коллективами людей, осуществляющих процесс автоматизированного проектирования, т.е., иными словами, САПР. САПР (по ГОСТ) представляют собой крупные организационно-технические системы, состоящие из подсистем, включающих комплексы средств автоматизации проектирования, взаимосвязанные с соответствующими подразделениями проектной организации [1]. Каждая из подсистем САПР, решая задачи, в соответствии со своим назначением, имеет общие цели: повышение качества проектных работ, снижение стоимости и сокращение сроков проектирования. Реально решить эти задачи можно только за счет многовариантной проработки проекта. Анализ структуры БЛА показывает, что все они отличаются многообразием возможных технических решений по составу и типам подсистем (СУ, ДУ и т.д.), их агрегатов и узлов, вариантами конструкторских и технологических решений, используемых при их разработке. Иными словами, структура изделия может рассматриваться как система переменного состава с различными вариантами реализации элементов. Для выбора того или иного варианта проектного решения их количество, необходимое для проектной проработки, увеличивается многократно. Автоматизировать процесс оперативного формирования проектных решений вариантов БЛА, позволяющий проводить их синтез, анализ, а также оценку качества и эффективности – одна из первоочередных проблем, требующих автоматизации [2]. Системный подход. Основные понятия, принципы и положения системного подхода. Сам термин системный подход подразумевает необходимость рассмотрения проектируемого объекта как сложную систему, состоящую из взаимосвязанных компонентов. Как правило, в реальной жизни системный подход применяется интуитивно без обращения к теоретическим методам системного анализа. Однако в проектной работе интуитивный подход без применения правил системного анализа может оказаться недостаточным. Основной и наиболее общий принцип системного подхода состоит в рассмотрении сложной технической системы, состоящей из частей (компонентов) с учётом их взаимодействия, а также с учетом взаимодействия всей системы с надсистемой, частью которой она является [1,5,6]. Реализация системного подхода включает в себя следующие моменты: · выявление структуры системы, т.е. состав ее элементов и их связи между собой; · типизацию (унификацию) её внутренних и внешних связей; · определение атрибутов (основных признаков), характеризующих систему и ее компоненты · анализ связей системы с надсистемой и внешней средой. Системный подход является базой для обобщающей научной дисциплины, которая называется "Теория систем", "Общая теория систем" (другое название – "Системный анализ").Теория систем – это научная дисциплина, в которой конкретизируются положения системного подхода для исследования и проектирования сложных экономических, социальных и технических систем, прежде всего слабоструктурированных. Характерными примерами таких систем являются производственные, технические системы. При проектировании таких систем цели проектирования достигаются в ходе многошагового, многоэтапного процесса принятия решений. Методы принятия решений изучает научная дисциплина, которая называется «Теория принятия решений». В технике дисциплину, в которой исследуются сложные технические системы, и аналогичную теории систем, называют системотехникой. Системотехника — инженерная дисциплина, появившаяся как аналог системной инженерии — направления науки и техники, охватывающего проектирование, создание, испытание и эксплуатацию сложных систем технического и социально-технического характера. 1961 г. в СССР вышел перевод первой в мире книги по системной инженерии Г.Х. Гуда и Р.Э. Макола «System engineering». Авторы рассматривали системную инженерию как дисциплину, дающую ключ к разработке крупных, сложных, высокоавтоматизированных технических систем, впервые описав основные признаки систем большого масштаба и указав на то, что при их создании широко используются коллективные методы работы и возникают проблемы не только технического, но и организационно-управленческого характера. Поскольку в слове системотехника в явном виде звучала «техника», термин «системотехника» довольно быстро стал использоваться в основном применительно только к техническим направлениям. Поэтому он быстро стал утрачивать первоначальный смысл междисциплинарного подхода и прикладной теории (технологии) систем, превратившись со временем в более узкое понятие из области автоматизированных систем управления (АСУ). Предметом системотехникиявляется: · во-первых, организация процесса создания, использования и развития технических систем, · во-вторых, методы и принципы проектирования и исследования технических систем. В теории систем и системотехнике используется ряд терминов, среди которых базовыми (основными) являются следующие понятия [5,6]: Система — множество элементов, находящихся в отношениях и связях между собой. Элемент — такая часть системы, представление о которой нецелесообразно подвергать при проектировании дальнейшему членению (или разделению). Сложная система — система, характеризуемая большим числом элементов и большим числом взаимосвязей элементов. Сложность системы определяется также видом взаимосвязей элементов и наличием у неё свойств (признаков): целенаправленности, целостности, иерархичности, многоаспектности. Целенаправленность — свойство искусственной системы, выражающее назначение системы. Это свойство необходимо для оценки эффективности вариантов системы. Целостность — свойство системы, характеризующее взаимосвязанность элементов и наличие зависимости выходных параметров системы от параметров ее элементов. При этом большинство выходных параметров системы не является простым повторением или суммой параметров ее элементов. Иерархичность — свойство сложной системы, выражающее возможность и целесообразность ее иерархического описания, т.е. представления в виде нескольких уровней, между компонентами которых имеются отношения целое-часть. Очевидно, что современные автоматизированные информационные системы и, в частности, системы автоматизированного проектирования, являются сложными в силу наличия у них перечисленных свойств и признаков. Структура системы — отображение совокупности элементов системы и их взаимосвязей. Понятие структуры отличается от понятия самой системы тем, что при описании структуры принимают во внимание лишь типы элементов и связей без конкретизации значений их параметров. Под параметром системы понимается величина, выражающая свойство или системы, или ее части, илисреды, влияющей на систему. Обычно в моделях систем в качестве параметров рассматривают величины, не изменяющиеся в процессе исследования системы. Параметры подразделяют на внутренние, выходные и внешние, и выражают соответственно свойства элементов системы, самой системы и внешней среды. Векторы внутренних, выходных и внешних параметров обозначают соответственно: X = (x, x 2,… xn), Y = (y, y 2,… ym), Q = (q, q 2,… qk). (1.1) Фазовая переменная — величина, характеризующая энергетическое или информационное наполнение элемента или подсистемы. Состояние системы — совокупность значений фазовых переменных, зафиксированных в одной временной точкепроцесса функционирования системы. Поведение системы (динамика системы) — изменение состояния системы в процессе функционирования. Вектор переменных, характеризующих состояние системы (вектор переменных состояния) — множество фазовых переменных, задание значений которых в некоторый момент времени полностью определяет поведение системы в дальнейшем. Пространство состояний — множество возможных значений вектора переменных состояния. Фазовая траектория — представление процесса функционирования системы в виде последовательности точек в пространстве состояний. Системы автоматизированного проектирования и системы управленияявляются одними из наиболее сложных современных искусственных систем. Поэтому их проектирование и сопровождение невозможны без применения системного подхода. На практике идеи и положения системного подхода выражаются и конкретизируются в виде нескольких его разновидностей, которые рассматриваются в курсе системотехники и также называются походами к проектированию. Среди таких подходов выделяют три основных. 1. При структурном подходе осуществляется синтез вариантов системы из набора компонентов (блоков). Эти варианты оцениваются при их частичном переборе с предварительным прогнозированием характеристик компонентов. 2. Блочно-иерархический подход к проектированию использует декомпозицию сложных описаний, как самих объектов, так и средств их создания на иерархические уровни и аспекты. (Примечание: под аспектом понимают описание системы с некоторой, заранее оговоренной точки зрения – функциональное, структурное и др.). При этом подходе используется понятие стиля проектирования (восходящее и нисходящее, смешанное) и устанавливаются связи между параметрами соседних иерархических уровней. 3. Объектно-ориентированный (объектный) подход наиболее часто используется при разработке информационного и программного обеспечения систем. Он основан на введении в описания объектов отношений их наследования между свойствами объектов разных иерархических уровней. (Примечание: наследование – процесс, благодаря которому один объект может приобретать свойства другого). Основой объектного подхода служит представление о том, что сложную техническую систему необходимо рассматривать как совокупность взаимодействующих друг с другом объектов, рассматривая каждый объект как экземпляр определенного класса, образующих иерархию. Такой подход сокращает объём спецификаций (описаний) объектов и уменьшает вероятность искажения данных за счёт ограничения доступа к ним. Всем разновидностям подходов к проектированию присущи следующие отличительные особенности: · Структуризация процесса проектирования, выражаемая декомпозицией проектных задач и документации, выделением стадий, этапов, проектных процедур. Эта структуризация является сущностью и блочно-иерархического подхода к проектированию. · Итерационный характер проектирования. Итерация – результат повторного применения какой-либо математической операции. Метод итераций – метод последовательных приближений к решению конечных уравнений, в результате чего получаются все более точные приближенные решения таких уравнений. · Типизация и унификация проектных решений и средств проектирования (технических, программных, информационных и т.д.). Разделение процесса проектирования во времени характеризуется стадиями и этапами. Стадии – наиболее крупные части процесса проектирования включают внешнее (разработка технического задания) и внутреннее проектирование. В свою очередь внутреннеепроектирование состоит из этапов (технических предложений, эскизного, технического и рабочего проектирования). По мере перехода от этапа к этапу степень подробности и тщательность проработки проекта возрастают, и рабочий проект уже должен быть вполне достаточным для изготовления опытных или серийных образцов. Этапы проектирования подразделяются на составные части, которые называются проектными процедурами. Проектная процедура соответствует части проектной работы, в результате выполнения которой принимается некоторое проектное решение. Она состоит из элементарных проектных операций, имеет твердо установленный порядок их выполнения и направлена на достижение локальной цели в процессе проектирования. Примеры проектных процедур: разработка компоновочной схемы, баллистическое проектирование, оценка целевой эффективности проектируемого объекта и др. Проектные процедуры, как было отмечено, делятся на более мелкие компоненты – проектные операции. Под проектной операцией понимают условно выделенную часть проектной процедуры или элементарное действие, совершаемое конструктором в процессе проектирования. Примеры проектных операций: расчёт аэродинамических характеристик объекта проектирования, моделирование напряжений и деформаций элементов конструкции, представление результатов проектирования в графической форме и др. Таким образом, проектирование сводится к выполнению некоторой последовательности проектных операций и проектных процедур. Такая последовательность называется маршрутом проектирования. Для проектирования сложных технических систем характерны нехватка достоверных исходных данных, неопределенность условий принятия решений. Это определяет итерационный, циклический характер ее решения. Учет статистического характера данных при моделировании в значительной мере основан на применении методе статистических испытаний (методе Монте-Карло), а принятие решений – на использовании теориинечетких множеств, применении экспертных систем, эволюционных вычислений. Требования к математическим моделям автоматизированного проектирования. Основные требования к математическим моделям можно свести к следующим положениям: универсальность; адекватность; экономичность точность. Степень универсальности модели характеризует полноту отображения в модели свойств реального объекта. Адекватность модели – это способность отражать заданные свойства объекта с приемлемой точностью. Адекватность оценивается перечнем отражаемых свойств и областями адекватности. Область адекватности – это область в пространстве параметров, в которой погрешности модели остаются в допустимых пределах. В большинстве случаев области адекватности определяются в пространстве внешних переменных. Экономичность модели определяется затратами ресурсов, необходимых для реализации модели. Так как в САПР используются математические модели, то экономичность характеризует в данном случае вычислительную эффективность, т.е. затраты машинных ресурсов. Точность модели – это степень соответствия оценок одноименных свойств объекта и модели. Для оценки точности необходимо сравнить значения параметров объекта, рассчитанные по модели с их фактическими значениями, полученными на основании анализа статистики. Пример оценки точности математической модели [3] Рассмотрим в качестве примера оценку точности математической модели расчета относительной массы заданного элемента конструкции БЛА μ(i). Для проведения сравнительного анализа воспользуемся статистической выборкой фактических значений относительной массы рассматриваемого элемента конструкции μ(i) ф выбранных промышленных изделий. Используя требуемые для расчета по модели значения параметров выбранных изделий, определим расчетные значения относительной массы заданного элемента конструкции для каждого изделия из выборки. Относительная погрешность расчета относительной массы заданного элемента конструкции БЛА μ(i) может быть записана в виде:
где μ(i)р – расчетное (получено по модели) значение относительной массы элемента конструкции для i -го варианта БЛА из статистической выборки, включающей N вариантов; μ(i) ф – фактическое значение относительной массы данного элемента конструкции для i -го варианта БЛА из статистической выборки. После вычисления относительных погрешностей
Полученные значения математического ожидания и дисперсии относительной погрешности в определении величины относительной массы μ выбранного элемента конструкции БЛА дают некоторое представление о точности массовых формул. Однако для полноты картины необходимо определить доверительные интервалы для полученных значений точечных оценок Поскольку статистические выборки отобранных промышленных изделий, как правило, небольшие, то для оценки математического ожидания ошибки
где Для оценки дисперсии S 2, используя таблицы χ 2-распределения [7], можно найти границы доверительных интервалов этой величины, вычисляемые следующим образом:
где ε1, ε2 - табличные значения χ2 -распределения. Следует заметить, что требования по точности предъявляются не только к моделям, но и также к численным методам решения уравнений математической модели Процедуры анализа. Цель анализа – получение информации о характере функционирования и значениях выходных параметров Y при заданных структуре объекта, сведениях о внешнихпараметрах Q и параметрах элементов X. Если заданы фиксированные значения параметров X и Q, то имеет место процедура одновариантного анализа, которая сводится к решению системы уравнений математической модели объекта, и вычислению вектора выходных параметров Y. Пример такой процедуры – расчет баллистических характеристик БЛА при заданных граничных условиях. В процедурах многовариантного анализа определяется влияние внешних параметров Q, разброса и нестабильности параметров элементов X на выходные параметры Y. Характерным примером процедуры многовариантного анализа является анализ чувствительности результатов баллистическогопроектирования к изменению исходных параметров БЛА. Если заданы статистические сведения о внутренних параметрах объекта X, и нужно получить оценки распределений численных значений выходных параметров Y, то имеет место процедура статистического анализа. Примером такой процедуры может служить оценка доверительных интервалов для статистических зависимостей, используемых в математических моделях проектных исследований. Требования к описанию аналитически не описываемых кривых Основное требование – использование минимума параметров, которые могут быть легко определены. Остальные требования можно сгруппировать следующим образом: · Параметры описания должны иметь возможность непрерывно изменяться, даже если кривая имеет кусочно-гладкий вид. Под гладкой дугой понимается дуга кривой с непрерывно изменяющимися касательными. · Описание должно обеспечивать возможность определения точек перегиба кривой. · Для описания кривой желательна непрерывность как можно более высокого порядка. · Метод должен обеспечивать гладкое соединение кривых. · Метод должен предусматривать независимое определение координат произвольной точки объекта. · Кривая должна быть сегментируемой (кусочно-составной) при сохранении своей исходной формы. Выполнение этих требований обеспечивается путём использования методов аппроксимации или интерполяции. Аппроксимация состоит в определении приближенного описания исходной кривой. Интерполяция – частный случай аппроксимации, в котором требуется согласование исходной и аппроксимирующей кривой в заданных опорных точках. Пример применения метода аппроксимации при формировании оптимальной траектории полета БЛА В качестве примера практического применения метода аппроксимации рассмотрим построение оптимальной траектории полета БЛА класса «поверхность-воздух». Основное требование к оптимальной траектории – распределение перегрузок по траектории должно обеспечивать минимум сопротивления, а, следовательно, и запаса топлива. Принято, что расчетная траектория располагается в вертикальной плоскости, проходя через точку старта и упрежденную точку встречи, и строится в опорной системе координат, у которой ось OX направлена из точки старта в упрежденную точку встречи, ось OY ей перпендикулярна, ось OZ горизонтальна (рис. 2.1). Для аналитического описания траектории в опорной системе координат воспользуемся упрощенным выражением аппроксимирующей зависимости приведенной в работе [17]:
Здесь обозначено где x, y – координаты БЛА в опорной системе координат, r т.в – дальность до упрежденной точки встречи; А i, – варьируемые коэффициенты, n – заданная степень ряда.
Рис. 2.1. Опорная траектория ЗУР Отметим попутно, что траектория БЛА в земной системе координат определяется следующим выражением:
где ɛт.в – угол места в точке встречи, H – высота полета цели, x Г – горизонтальная дальность полета. Выражения для нормированных значений первой и второй производных, необходимые для определения параметров траектории имеют вид:
Траектория полета БЛА в форме (2.14) отвечает следующим граничным условиям: при при Основными параметрами траектории являются: углы наклона траектории в точке старта ϴст и в точке встречи ϴт.в, а также перегрузка в точке встречи. Угол наклона траектории в точке встречи определяется выражением: ϴт.в = ɛт.в + φт.в (2.17) где: φт.в – угол наклона траектории в точке встречи в опорной системе координат определяется через первую производную φт . в = arctg Для обеспечения минимального индуктивного сопротивления по траектории потребную перегрузку в точке встречи (при Потребная перегрузка по траектории включает маневренную составляющую (центростремительная сила, деленная на вес), определяемую через текущую кривизну траектории ρ, и гравитационную составляющую
Откуда выражение для потребной нормальной перегрузки запишем в виде: ny = V 2 /(g ρ) + cosϴ, (2.21) В формуле потребной нормальной перегрузки текущая кривизна траектории определяется через вторую производную:
Тогда окончательно выражение для потребной нормальной перегрузки будет иметь вид: ny = Подставляя в (2.16)
В большинстве случаев опорные траектории описываются полиномом 3-го, 4-го порядка (n =2–3). Так, например, при n =2 выражение (2.14) преобразуется к виду:
При условии А1=А2 опорная траектория описывается полиномом: Тогда выражения для первой и второй производных преобразуются к виду:
Рассмотрим граничные условия: при при Полученная траектория (2.27) характеризуется тем, что при малых углах подхода к цели ее кривизна и потребная перегрузка (без учета составляющей веса), исходя из (2.24), (2.28) изменяются практически линейно, уменьшаясь до нуля в точке встречи. Значение коэффициента А1 = – Если в качестве примера задать значение
Основное требование к оптимальной траектории – обеспечивать минимум сопротивления – реализуется распределением потребных перегрузок по опорной траектории. Оно может быть получено из соотношений (2.23) и (2.16). При известных по траектории значениях скорости V, параметров Ai, высоты Нт.в и дальности до точки встречи r т.в процедура определения ny (t) не вызывает затруднений. Это связано с тем, что опорная траектория задана в виде нормированного полинома с постоянными коэффициентами Ai. При этом кривизна траектории ρ определяется как функция 1-ой и 2-ой производных от опорной траектории, которые, в свою очередь, определяются нормированными полиномами с теми же коэффициентами Ai. Таким образом, аналитическое выражение для траектории полета БЛА в форме (2.14) удовлетворяет требованиям обеспечения минимума сопротивления, а, следовательно, и запаса топлива.
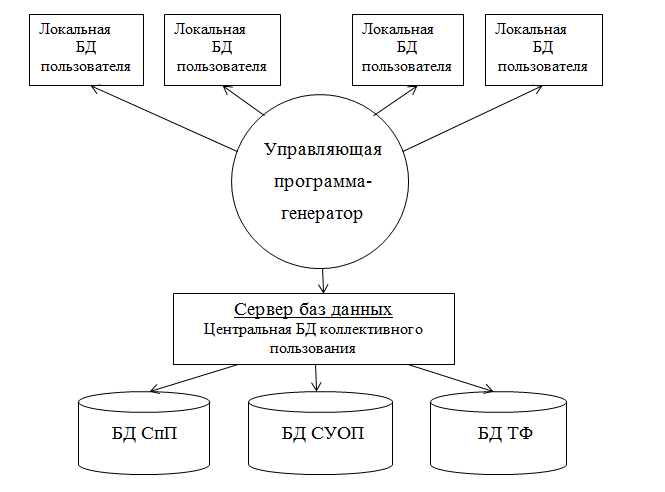
Структура учебной САПР-602 Примером реализации синтеза программ переменной структуры может служить рассмотренная в работе [13] система синтеза проектных программ, включающая сетевую управляющую программу-генератор Win Старт, сервер баз данных, центральную базу данных коллективного пользования и локальную базу данных пользователя. Укрупненная структура такой системы показана на рис. 4.4. Управляющая программа-генератор предназначена для сборки программ из элементной базы прикладного программного обеспечения; формирования информационных моделей решаемых задач с помощью СУОП; управления и сервисного обеспечения процесса проектирования. Центральная база данных, располагаемая на сервере, позволяет централизованно хранить базы данных всех компонент системы, необходимых для синтеза программ: специальных подпрограмм, типовых программных фрагментов, унифицированных обозначений переменных, а также индивидуальные пользовательские комплекты.
Рис. 4.4. Структура системы синтеза проектных программ Каждый индивидуальный комплект пользователя содержит учетную информацию о пользователе и информацию, построенную в соответствии с последовательностью его работы в системе: «проекты», «задания на генерацию» проектных программ (КОА), комплекты «исходных данных», «результаты расчетов» и др. Локальная база данных предназначена для хранения наиболее часто используемой информации. Она автоматически обновляется при каждом изменении соответствующей информации в центральной базе данных. Следует отметить, что каждое КОА (задание на генерацию) использует конкретный состав программных модулей выбранного проектировщиком назначения. В типовом КОА (задании на генерацию) фрагменты с вызываемыми из БСпП программными модулями составляют основу программы. Помимо ТФ вызова программных модулей, в тексте КОА используются также и вспомогательные ТФ организации итерационных процессов и вывода табличной и графической информации. Такой выбор конкретного состава программных фрагм
|
||||
|
|
Последнее изменение этой страницы: 2021-05-11; просмотров: 186; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 216.73.216.20 (0.016 с.) |

 , (2.2)
, (2.2) для всех вариантов БЛА можно подсчитать оценку математического ожидания (
для всех вариантов БЛА можно подсчитать оценку математического ожидания ( ) и дисперсии S 2 этих погрешностей по формулам [7]:
) и дисперсии S 2 этих погрешностей по формулам [7]: , (2.3)
, (2.3) , (2.4)
, (2.4) и S 2. С этой целью задаются значением доверительной вероятности p (в технике p =0,95) или уровнем значимости (α=1 - p) [7].
и S 2. С этой целью задаются значением доверительной вероятности p (в технике p =0,95) или уровнем значимости (α=1 - p) [7]. можно воспользоваться таблицами t -распределения Стьюдента. В этом случае, задаваясь величиной p (или α), находят табличное значение t -распределения Стьюдента – ε. Тогда доверительный интервал для оценки математического ожидания
можно воспользоваться таблицами t -распределения Стьюдента. В этом случае, задаваясь величиной p (или α), находят табличное значение t -распределения Стьюдента – ε. Тогда доверительный интервал для оценки математического ожидания  – δ) ˂
– δ) ˂  ˂ (
˂ ( , (2.6)
, (2.6) , (2.7)
, (2.7) (2.8)
(2.8) (2.14)
(2.14) = y / r т.в,
= y / r т.в,  = x / r т.в,
= x / r т.в,
 (2.15)
(2.15) (2.16)
(2.16) =arctg
=arctg  (2.18)
(2.18) при
при  =1:
=1: = – arctg(A1) (2.19)
= – arctg(A1) (2.19) +
+  (2.20)
(2.20) (2.22)
(2.22) + cosϴ (2.23)
+ cosϴ (2.23) ꞌ= – A 1; (2.24)
ꞌ= – A 1; (2.24) = – 2(A 1 – A 2). (2.25)
= – 2(A 1 – A 2). (2.25) =
=  (A 1 (1–
(A 1 (1–  2 +(A 1 + A 2)
2 +(A 1 + A 2)  A 1
A 1  2)
2) ꞌ= 2А1;
ꞌ= 2А1;  =1 могут быть определены (см. 2.19) путем задания желаемого угла наклона траектории в точке встречи в опорной системе координат φт.в. Рекомендуемое в работе [21] значение
=1 могут быть определены (см. 2.19) путем задания желаемого угла наклона траектории в точке встречи в опорной системе координат φт.в. Рекомендуемое в работе [21] значение  ˂ 35º.
˂ 35º. = –30º. Тогда А1 = 0,578 и аналитическое описание траектории ЗУР в опорной системе координат примет вид:
= –30º. Тогда А1 = 0,578 и аналитическое описание траектории ЗУР в опорной системе координат примет вид: