Заглавная страница Избранные статьи Случайная статья Познавательные статьи Новые добавления Обратная связь КАТЕГОРИИ: ТОП 10 на сайте Приготовление дезинфицирующих растворов различной концентрацииТехника нижней прямой подачи мяча. Франко-прусская война (причины и последствия) Организация работы процедурного кабинета Смысловое и механическое запоминание, их место и роль в усвоении знаний Коммуникативные барьеры и пути их преодоления Обработка изделий медицинского назначения многократного применения Образцы текста публицистического стиля Четыре типа изменения баланса Задачи с ответами для Всероссийской олимпиады по праву 
Мы поможем в написании ваших работ! ЗНАЕТЕ ЛИ ВЫ?
Влияние общества на человека
Приготовление дезинфицирующих растворов различной концентрации Практические работы по географии для 6 класса Организация работы процедурного кабинета Изменения в неживой природе осенью Уборка процедурного кабинета Сольфеджио. Все правила по сольфеджио Балочные системы. Определение реакций опор и моментов защемления |
Выбор адекватной модели объекта.
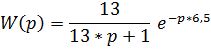
В ходе выполнения данного раздела курсовой работы были получены параметры передаточной функции исследуемого объекта с применением различных инструментариев. Сравнив все три метода с помощью значения дисперсии (рис. 11) можно сделать вывод, что наименьшее значение среднее квадратического отклонения имеет модель полученная с помощью интсрументария Curve Fitting Toolboox. Поэтому в дальнейших расчетах в качестве передаточной функции, будем использовать следующую передаточную функцию:
Выбор закона регулирования Суть вопроса сводится к выбору управления, при котором выходное значение объекта управления совпадало бы с задающим значением или их разница лежала бы в допустимых пределах при изменении внешнего возмущенного воздействия. Для определения закона регулирования вычисляют величину
Подставим в формулу коэффициенты из таблицы №1.Получим:
Т.к. полученное значение находится в промежутке, выбираем ПИ-закон регулирования.
Синтез САУ одномерным объектом Метод Циглера-Никольса Данный метод основан на критерии Найквист. Суть Критерия заключается в следующем: замкнутая система автоматического регулирования будет устойчива, если устойчива соответствующая ей разомкнутая система и годограф ее АФЧХ не охватывает точку с координатами (-1,0j). Критерий выполняется, если разомкнутая система находится на границе устойчивости при малой степени астатизма.
Суть метода заключается в том, что рассчитывается пропорциональный регулятор, который выводит систему на границу устойчивости. Уравнение для амплитуды и фазы нашего объекта:
Так как нам необходимо перейти на главную ветвь арктангенса изменим уравнение для фазы:
Далее постоим график зависимости фазы от частоты в границах [0;-π] по оси φ и [0;ω] по оси ω.
Рис.12. Графическое определение критической частоты. Далее делаем уточнение корня с помощью функции root:
Находим критический коэффициент передачи:
Переходим на эмпирический части метода, а именно к нахождению коэффициента передачи, времени изодрома и интегральной составляющей регулятора по следующим формулам:
Надо так же заметить, что метод применим лишь для объекта в совокупности по числителю и знаменателю передаточной функции третьего и более высокого порядков. В противном случае объект должен обладать запаздыванием. Исследуем реакцию системы на типовые сигналы по каналам управления и возмущения. 1) Переходная функция по каналу управления.
Рис.13.Замкнутая система управления со ступенчатым воздействие по каналу управления. где: PID Controller: P= 0,132 I= 7.1*10^-3; Transport Delay: Time Delay =6,5; Step: Final Value = 1, Step Time = 0, Initial Value = 0, Sample Time = 0.
Рис.14.Реакция системы по каналу управления на ступенчатое воздействие. 2) Переходная функция по каналу возмущения.
Рис.15.Замкнутая система управления со ступенчатым воздействием по каналу возмущения. где: PID Controller: P= 0,132 I= 7.1*10^-3; Transport Delay: Time Delay =6,5; Step: Final Value = 1, Step Time = 0, Initial Value = 0, Sample Time = 0.
Рис.16.Реакция системы по каналу возмущения на ступенчатое воздействие. 3) Импульсная функция по каналу управления.
где: PID Controller: P= 0,132 I= 7.1*10^-3; Transport Delay: Time Delay =6,5; Step: Final Value = 1, Step Time = 0, Initial Value = 0, Sample Time = 0. Pulse Generator: Amplitude:1;Period:1000;Pulse Width(% of period):0.0001
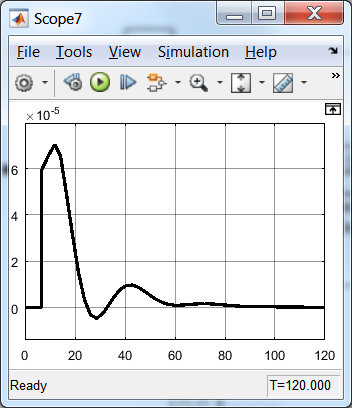
Рис.17.Реакция системы по каналу управления на импульсное воздействие 4) Импульсная функция по каналу возмущения.
Рис.18.Замкнутая система управления с импульсным воздействием по каналу возмущения. где: PID Controller: P= 0,132 I= 7.1*10^-3; Transport Delay: Time Delay =6,5; Pulse Generator: Amplitude:1;Period:1000;Pulse Width(% of period):0.5.
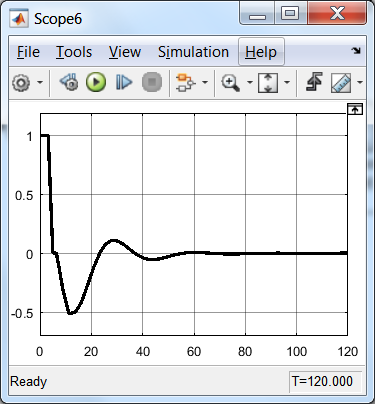
Рис.19.Реакция системы по каналу возмущения на импульсное воздействие.
|
|||||
|
|
Последнее изменение этой страницы: 2021-05-27; просмотров: 72; Нарушение авторского права страницы; Мы поможем в написании вашей работы! infopedia.su Все материалы представленные на сайте исключительно с целью ознакомления читателями и не преследуют коммерческих целей или нарушение авторских прав. Обратная связь - 3.17.174.156 (0.009 с.) |
 , где τз=0,5*T=0.5*13=6,5.
, где τз=0,5*T=0.5*13=6,5.
 -реальный закон регулирования.
-реальный закон регулирования. -пропорциональный закон
-пропорциональный закон -ПИ-закон
-ПИ-закон -ПИД-закон
-ПИД-закон -предикторы
-предикторы





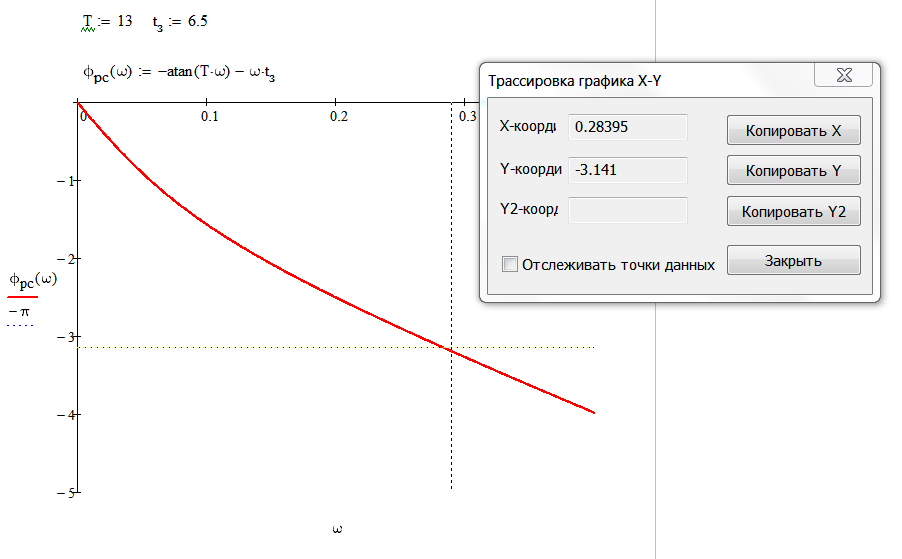
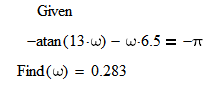
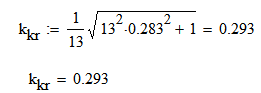
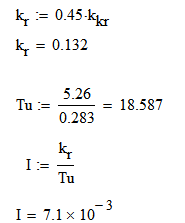
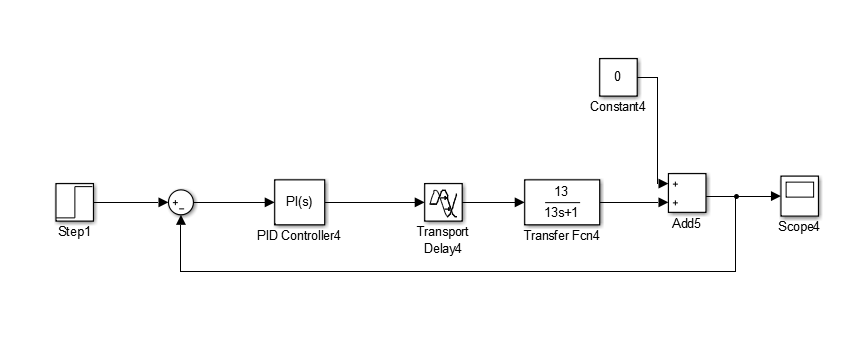
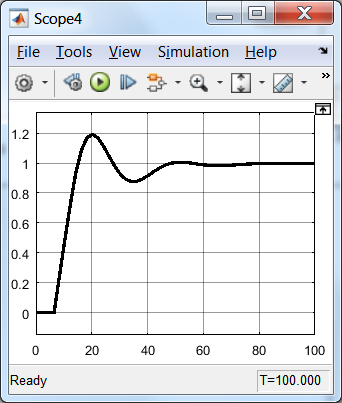

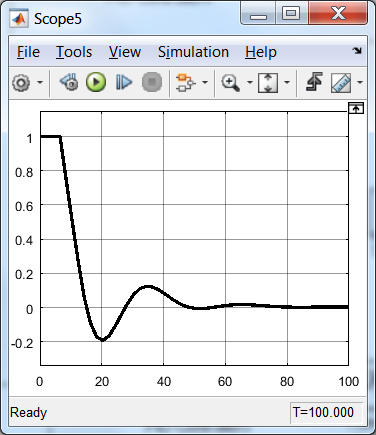
 Рис.16.Замкнутая система управления с импульсным воздействием по каналу управления.
Рис.16.Замкнутая система управления с импульсным воздействием по каналу управления.